DISPOSITIVO PARA ELIMINAR LOS PUNTOS CIEGOS DE UN VEHÍCULO.
La invención se refiere a un dispositivo (20) para eliminar los puntos ciegos o áreas ocultas que al menos un pilar A de un vehículo genera a un conductor (29),
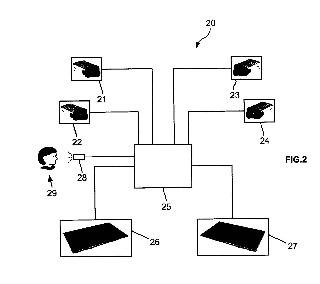
que se caracteriza por el hecho de que comprende al menos un elemento de captura (21 ,22; 23, 24) para obtener al menos una imagen del área que queda oculta al conductor a causa del pilar A; una unidad de control (25) para procesar esta imagen obtenida y generar una representación del área oculta a partir de la imagen procesada; y un elemento de visualización (26; 27) para mostrar al conductor (29) la representación del área oculta.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100575.
Solicitante: MARTÍNEZ VITERI, Ignacio.
Nacionalidad solicitante: España.
Inventor/es: MARTÍNEZ VITERI,Ignacio, MILLÁN PRIOR,Borja.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › Disposiciones para la visibilidad óptica (equipo antideslumbrante, p. ej. polarizador, para parabrisas o ventanas B60J 3/00).
- G03B21/00 FISICA. › G03 FOTOGRAFIA; CINEMATOGRAFIA; TECNICAS ANALOGAS QUE UTILIZAN ONDAS DISTINTAS DE LAS ONDAS OPTICAS; ELECTROGRAFIA; HOLOGRAFIA. › G03B APARATOS O DISPOSITIVOS PARA HACER FOTOGRAFIAS, PARA PROYECTARLAS O VERLAS; APARATOS O DISPOSITIVOS QUE UTILIZAN TECNICAS ANALOGAS UTILIZANDO ONDAS DIFERENTES DE LAS ONDAS OPTICAS; SUS ACCESORIOS (partes ópticas de estos aparatos G02B; materiales fotosensibles para la fotografía o procedimientos fotográficos G03C; aparellaje para el tratamiento de materiales fotosensibles después de la exposición G03D). › Proyectores o visores del tipo por proyección; Sus accesorios (dispositivos de cambio de imagen G03B 23/00).
- H04N7/18 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 7/00 Sistemas de televisión (detalles H04N 3/00, H04N 5/00; métodos y arreglos, para la codificación, decodificación, compresión o descompresión de señales de vídeo digital H04N 19/00; distribución selectiva de contenido H04N 21/00). › Sistemas de televisión en circuito cerrado, es decir, sistemas en los cuales la señal no es difundida.
Fragmento de la descripción:
Dispositivo para eliminar los puntos ciegos de un vehículo.
La presente invención se refiere a un dispositivo para eliminar los puntos ciegos de un vehículo, preferentemente un vehículo automóvil, y más concretamente, para eliminar los puntos ciegos o áreas ocultas que al menos un pilar A de un vehículo genera a un conductor.
La invención es aplicable a la seguridad en vehículos, principalmente en vehículos automóviles.
Antecedentes de la invención Es conocido en el estado de la técnica que los elementos que unen el techo con el resto de la estructura habitable de un vehículo reciben el nombre de pilares y, dependiendo de su posición se les define como (desde la parte delantera a la trasera del vehículo) :
• Pilar A: es el primer pilar y soporta el parabrisas delantero del vehículo;
• Pilar B: es el segundo pilar (normalmente el de la parte central) y de él cuelga el cinturón de seguridad;
• Pilar C: es el tercer pilar y soporta la ventana trasera del vehículo.
Algunos vehículos (por ejemplo, un vehículo familiar convencional) presentan también un cuarto pilar, conocido como pilar D, que es el que está dispuesto en la parte más trasera del vehículo.
En el caso de que un vehículo carezca de alguno de los pilares descritos, los pilares siguientes no modifican su denominación.
A modo de ejemplo, la figura 1 muestra un diagrama esquemático de un vehículo automóvil, en el que se señalan los diferentes tipos de pilares, de acuerdo con el estado de la técnica.
De todos los pilares definidos, los pilares A son los más significativos a nivel de seguridad, puesto que son los que generan los puntos ciegos más importantes al conductor del vehículo y, por tanto, son los que provocan un mayor número de accidentes con víctimas mortales.
Además, en los últimos años se está produciendo un progresivo aumento del grosor de los pilares A de los vehículos automóvil, principalmente debido a causas tales como cuestiones estéticas, la creciente necesidad de mejorar la resistencia estructural del vehículo ante una colisión, y la inclusión de sistemas de airbag de cortina para los pasajeros. Obviamente, el aumento del grosor de este tipo de pilares supone un aumento de la dificultad para el conductor del vehículo de advertir la presencia de otros vehículos (normalmente vehículos de dos ruedas) en determinadas situaciones, por lo que también aumenta la posibilidad de sufrir un accidente.
Así, cuanto mayor sea el ancho de los pilares A, más se empeora la visión directa del conductor y, al mismo tiempo, al estar situados relativamente cerca de los ojos del conductor, provoca mayores dificultades de visión cuando sólo uno de los ojos puede ver el objeto mientras que el otro queda obstruido por el pilar A. Este efecto se ve agravado aún más cuando el objeto está cercano al conductor, puesto que la distancia entre los ojos es mayor que el ancho del pilar A.
Son conocidos un gran número de estudios que certifican la peligrosidad de estas estructuras y la facilidad con la que vehículos de pequeñas dimensiones, tales como ciclomotores y motocicletas (en vehículos con peor visibilidad, estas estructuras son capaces de ocultar incluso un coche de gran tamaño a una distancia equivalente a la de frenado) , pueden quedar fuera del campo de visión del conductor.
De acuerdo con el estudio [Forward Looking Blindspots (FLBs) . A report of A-Pillar induced field-of-view obstruction and driver performance in a simulated rural environment. http://www.safespeed.org.uklminnesota001.pdf], realizado con un simulador en la Universidad de Minnesota, se demostró que un gran número de conductores no veía el vehículo que se aproximaba, colisionando con él sin llegar a percatarse de su presencia.
Según la investigación [Field of vision (A-pillar Geometr y ) - a review of the needs of drivers. https://dspace.lboro.ac. uk/dspace-jspui/bitstream/2134/519/1/TT1130%20AR2180.pdf], hasta un tercio de los obstáculos que se aproximaban por el lado de interferencia del montante del parabrisas no eran percibidos por el conductor y, aunque se logró mejorar notablemente la percepción de los objetos haciendo un movimiento adecuado de búsqueda con la cabeza, este procedimiento no puede ser recomendado por ser incompatible con la atención necesaria que debe prestarse a la carretera en la zona frente al vehículo.
Por otro lado, existen también estudios que afirman que los conductores menos experimentados no suelen mover la cabeza alrededor del pilar A, por lo que pierden la visión de determinadas áreas al realizar maniobras (por ejemplo, al realizar incorporaciones o al introducirse en cruces) . De este modo, el estudio sobre la capacidad de "scan" del campo de visión desde el puesto de conducción [Forward Looking Blindspots (FLBs) . A report of A-Pillar induced field-of-view obstruction and driver performance in a simulated rural environment. http://www.safespeed.org.uk/ minnesota001.pdf] citado anteriormente, destaca a los conductores menos experimentados como uno de los grupos que no realizan los movimientos de cabeza alrededor de los pilares para minimizar las zonas de visibilidad, al realizar maniobras.
Por lo tanto, queda claro a partir de lo descrito que los puntos ciegos o áreas ocultas generados por los pilares A deben ser tenidos en consideración a la hora de intentar mejorar la seguridad del tráfico.
Descripción de la invención
A partir de lo descrito anteriormente, es un objetivo de la presente invención proporcionar un dispositivo para eliminar de manera eficiente los puntos ciegos o áreas ocultas que un pilar A genera a un conductor de un vehículo.
Este objetivo se consigue de acuerdo con la reivindicación 1, proporcionando un dispositivo para eliminar los puntos ciegos o áreas ocultas que al menos un pilar A de un vehículo genera a un conductor, que comprende al menos un elemento de captura para obtener al menos una imagen del área que queda oculta al conductor a causa del pilar A; una unidad de control para procesar esta imagen capturada y generar una representación de la imagen procesada; y un elemento de visualización para mostrar al conductor la representación del área oculta, a partir de la imagen procesada.
De este modo, el conductor puede ver en todo momento el área que queda oculta por el pilar A, aumentándose su seguridad y la de otras personas (por ejemplo, conductores de otros vehículos o peatones) . Básicamente, el elemento de captura (que puede ser uno o más) está enfocado de manera que obtiene información (pueden ser imágenes estáticas (por ejemplo, fotos) o imágenes dinámicas (por ejemplo, video) ) referente al área oculta al conductor por el pilar A; la unidad de control procesa la información obtenida a partir del elemento de captura, de manera que la adapta para que sea adecuada para el conductor (es decir, que le proporcione información suficiente) , generando una representación del área oculta que el pilar A genera al conductor; y, a través del elemento de visualización, la unidad de control muestra esta representación del área oculta, de manera que el conductor recibe la información necesaria y suficiente para tomar decisiones adecuadas con respecto a cualquier maniobra que tenga que realizar con el vehículo.
De acuerdo con una realización de la invención, la unidad de control puede presentar diferentes formas, dependiendo de las necesidades y requerimientos de las diferentes partes que intervienen (por ejemplo, el vehículo o el dispositivo) . Así, la unidad de control puede presentar, por ejemplo, la forma de un único dispositivo que contiene todo el hardware (por ejemplo, contenido en una caja) ; la forma en la que parte de los elementos de la unidad de control pueden estar contenidos en los propios elementos de captación de imágenes y/o en los propios elementos de visualización y la otra parte de dichos elementos puede estar contenida en una caja, los cuales están interconectados con los elementos de visualización y captación de imágenes mediante las interfaces adecuadas; o la totalidad del hardware de la unidad de control está distribuida entre los elementos de visualización y/o captación de imágenes.
De acuerdo con una realización preferida de la invención, el dispositivo permite eliminar los puntos ciegos o áreas ocultas que dos pilares A de un vehículo generan a un conductor, comprendiendo el dispositivo elementos de captura de imágenes de las áreas que quedan ocultas al conductor a causa de los dos pilares A del vehículo.
Normalmente, un vehículo comprende dos pilares A, por lo que el dispositivo objeto de la invención está adaptado también para eliminar los puntos ciegos o áreas...
Reivindicaciones:
1. Dispositivo (20) para eliminar los puntos ciegos o áreas ocultas que al menos un pilar A de un vehículo genera a un conductor (29) , caracterizado por el hecho de que comprende:
- al menos un elemento de captura (21, 22; 23, 24) para obtener al menos una imagen del área que queda oculta al conductor a causa del pilar A;
- una unidad de control (25) para procesar esta imagen obtenida y generar una representación del área oculta a partir de la imagen procesada; y
- un elemento de visualización (26; 27) para mostrar al conductor (29) la representación del área oculta.
2. Dispositivo (20) para eliminar los puntos ciegos o áreas ocultas que dos pilares A de un vehículo generan a un conductor (29) según la reivindicación 1, que comprende elementos de captura de imágenes (21, 22; 23, 24) de las áreas que quedan ocultas al conductor (29) a causa de los dos pilares A del vehículo.
3. Dispositivo (20) según la reivindicación 2, que comprende un elemento de visualización (26, 27) para cada uno de los dos pilares A del vehículo.
4. Dispositivo (20) según una cualquiera de las reivindicaciones 1 a 3, en el que al menos un elemento de captura de imágenes (21, 22; 23, 24) está dispuesto en al menos un pilar A del vehículo.
5. Dispositivo (20) según una cualquiera de las reivindicaciones 1 a 4, en el que al menos un elemento de captura de imágenes (21, 22; 23, 24) está dispuesto en al menos un retrovisor del vehículo.
6. Dispositivo (20) según una cualquiera de las reivindicaciones 1 a 5, en el que el elemento de captura de imágenes (21; 22; 23; 24) comprende una cámara de video.
7. Dispositivo (20) según una cualquiera de las reivindicaciones 1 a 6, en el que la unidad de control (25) comprende medios informáticos para procesar la imagen obtenida, y medios informáticos para generar una representación del área oculta a partir de la imagen procesada.
8. Dispositivo (20) según una cualquiera de las reivindicaciones 1 a 7, que comprende un elemento captador (28) de la posición del conductor (29) en el vehículo, siendo dicho elemento conectable a la unidad de control (25) .
9. Dispositivo (20) según la reivindicación 8, en el que la unidad de control (25) comprende medios informáticos para determinar la posición del conductor (29) en el vehículo, a partir de la información proporcionada por el elemento captador (28) ; y medios informáticos para determinar la línea de visión del conductor (29) , a partir de la posición determinada del conductor en el vehículo.
10. Dispositivo (20) según la reivindicación 9, en el que el elemento captador comprende al menos un elemento sensor (28) para determinar la posición de los ojos del conductor (29) en el vehículo.
11. Dispositivo (20) según una cualquiera de las reivindicaciones 9 ó 10, en el que los medios informáticos de procesamiento tratan las imágenes capturadas de manera que concuerden en escala, profundidad y/o perspectiva con las correspondientes a la línea de visión determinada del conductor (29) .
12. Dispositivo (20) según una cualquiera de las reivindicaciones 1 a 11, en el que el elemento de visualización (26;27) comprende una pantalla.
13. Dispositivo (20) según la reivindicación 12, en el que la pantalla (26; 27) es de tipo flexible.
14. Dispositivo (20) según la reivindicación 13, en el que la pantalla flexible (26; 27) se dispone en el vehículo de manera que recubre substancialmente la totalidad de la superficie de un pilar A, por la parte interior al habitáculo del vehículo.
15. Dispositivo (20) según una cualquiera de las reivindicaciones 13 ó 14, en el que la pantalla flexible (26; 27) es una pantalla flexible del tipo OLED (diodo orgánico de emisión de luz - en inglés, Organic Light-Emitting Diode) basada en OTFT (transistores orgánicos de película fina - en inglés, Organic Thin-Film Transistors) .
16. Procedimiento para mostrar una representación del área oculta que al menos un pilar A de un vehículo genera a un conductor (29) , siendo ejecutable dicho procedimiento en una unidad de control (25) de un dispositivo (20) según una cualquiera de las reivindicaciones 1 a 15, caracterizado por el hecho de que comprende:
- recibir al menos una imagen referente al área oculta que el pilar A genera al conductor (29) , obtenida por el al menos un elemento de captura de imágenes (21, 22; 23, 24) del dispositivo (20) ;
- Procesar dicha imagen recibida;
- Generar una representación del área oculta, a partir de la imagen procesada;
- Mostrar al conductor (29) esta representación del área oculta, a través del elemento de visualización (26; 27) del dispositivo (20) .
17. Procedimiento según la reivindicación 16, que comprende además:
- Recibir información referente a la posición del conductor (29) en el vehículo, obtenida por el elemento captador
(28) del dispositivo (20) ;
- Determinar la línea de visión del conductor (29) , a partir de la información recibida referente a la posición del conductor en el vehículo;
en el que el procesamiento de la imagen recibida se realiza a partir de la línea de visión determinada, de manera que se ajusta la escala, la profundidad y/o la perspectiva de la imagen recibida de acuerdo con esta línea de visión.
18. Programa de ordenador que comprende instrucciones de programa que se ejecutan en un sistema de computación para realizar el procedimiento para mostrar una representación del área oculta que un pilar A de un vehículo genera a un conductor según una cualquiera de las reivindicaciones 16 a 17.
19. Programa de ordenador según la reivindicación 18, que está almacenado en unos medios de almacenamiento.
20. Programa de ordenador según la reivindicación 18, que es portado por una onda portadora.
21. Sistema para mostrar una representación del área oculta que al menos 20 un pilar A de un vehículo genera a un conductor (29) , siendo utilizable dicho sistema en una unidad de control (25) de un dispositivo (20) según una cualquiera de las reivindicaciones 1 a 15, caracterizado por el hecho de que comprende:
- Medios recibir al menos una imagen referente al área oculta que el pilar A genera al conductor (29) , obtenida por el al menos un elemento de captura de imágenes (21, 22; 23, 24) del dispositivo (20) ;
- Medios para procesar dicha imagen recibida;
- Medios para generar una representación del área oculta, a partir de la imagen procesada;
- Medios para mostrar al conductor (29) esta representación del área oculta, a través del elemento de visualización (26; 27) del dispositivo (20) .
Patentes similares o relacionadas:
Panel de ventana con dispositivo de sujeción para unir piezas de accesorio y método de ensamblaje, del 15 de Julio de 2020, de SAINT-GOBAIN GLASS FRANCE: Una unidad de acristalamiento de vehículo que tiene un elemento acristalado y al menos una base para la fijación reversible de un accesorio a dicho […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de cámara y sistema de reemplazo de espejo, del 15 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de cámara para un vehículo, en particular a un vehículo comercial, comprendiendo: al menos una unidad de captación de imágenes […]
Sistema de asistencia a la conducción para un vehículo, vehículo ferroviario y procedimiento de uso asociados, del 18 de Diciembre de 2019, de ALSTOM Transport Technologies: Sistema de asistencia a la conducción para un vehículo que consta de una cabina acotada por una ventana y al menos un elemento […]
Estructura de visualización, del 4 de Diciembre de 2019, de Inbecam Oy: Una estructura de visualización para un sistema de visualización de punto ciego de un vehículo, estando dispuesta la estructura de visualización (DS) para instalarse en conexión […]
Aparato de control y procedimiento para un sistema de asistencia al conductor de un vehículo, del 13 de Noviembre de 2019, de CONTI TEMIC MICROELECTRONIC GMBH: Aparato de control (ECU) para un sistema de asistencia al conductor de un vehículo, que comprende un procesador de señales (DSP), que sirve para procesar datos […]
 Sistema de visión, del 18 de Septiembre de 2019, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo para la representación de una zona de grabación (A, B, C) situada por fuera del vehículo que comprende una […]
Sistema de visión, del 18 de Septiembre de 2019, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo para la representación de una zona de grabación (A, B, C) situada por fuera del vehículo que comprende una […]
Dispositivo de accionamiento para un elemento que se va a accionar, del 11 de Septiembre de 2019, de GEBR. BODE GMBH & CO. KG: Dispositivo de accionamiento para accionar un elemento, que presenta - un accionamiento de correa dentada con una correa dentada , - por lo menos un disco dentado […]