DISPOSITIVO PARA DESPLAZAR Y POSICIONAR UN OBJETO EN EL ESPACIO.
Dispositivo para desplazar y posicionar un objeto en el espacio,
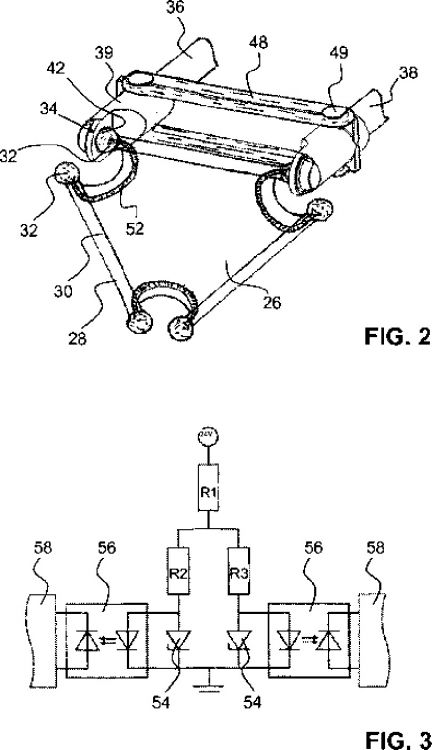
con al menos tres brazos de accionamiento (18) unidos en cada caso a una unidad de motor/transmisión (16) y que pueden bascular alrededor de un eje de transmisión (s), un elemento soporte (26) previsto para disponer al menos un medio de agarre para agarrar el objeto, en donde cada brazo de accionamiento (18) presenta en su extremo libre un primer eje de articulación (m) situado en paralelo al eje de transmisión (s), con primeras partes de articulación (22) dispuestas separadas entre sí en cada caso de una primera articulación de rótula (24), el elemento soporte (26) presenta en cada caso un segundo eje de articulación (n) asociado a cada brazo de accionamiento con primeras partes de articulación (32) dispuestas separadas entre sí en cada caso de una segunda articulación de rótula (24), el primer eje de articulación (m) está unido al segundo eje de articulación (n) a través de una pareja de barras de unión (36, 38) con segundas partes de articulación extremas (40, 42) y las segundas partes de articulación extremas (40, 42) de las barras de unión (36, 38) forman, con las primeras partes de articulación (22) sobre el primer eje de articulación (m) y las primeras partes de articulación (32) sobre el segundo eje de articulación (n), las primeras y segundas articulaciones de rótula (24, 34), y en donde las barras de unión (36, 38) para estabilizar las articulaciones de rótula (24, 34) están unidas entre sí, caracterizado porque los brazos de accionamiento (18) aislados entre sí eléctricamente, las barras de unión (36, 38), las partes de articulación (22, 32, 40, 42) de las articulaciones de rótula (24, 34) y el elemento soporte (26) forman partes de un circuito de corriente de vigilancia eléctricamente conductoras o que presentan líneas de señales
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/050029.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20,70442 STUTTGART.
Inventor/es: BREU,MICHAEL, RENNER,JUERGEN, RUTSCHMANN,HARRY.
Fecha de Publicación: .
Fecha Concesión Europea: 12 de Mayo de 2010.
Clasificación Internacional de Patentes:
- B25J17/02F2
- B25J19/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos de seguridad.
Clasificación PCT:
Fragmento de la descripción:
Dispositivo para desplazar y posicionar un objeto en el espacio.
Campo técnico
La invención se refiere a un dispositivo para desplazar y posicionar un objeto en el espacio, con al menos tres brazos de accionamiento unidos en cada caso a una unidad de motor/transmisión y que pueden bascular alrededor de un eje de transmisión, un elemento soporte previsto para disponer al menos un medio de agarre para agarrar el objeto, en donde cada brazo de accionamiento presenta en su extremo libre un primer eje de articulación situado en paralelo al eje de transmisión, con primeras partes de articulación dispuestas separadas entre sí en cada caso de una primera articulación de rótula, el elemento soporte presenta en cada caso un segundo eje de articulación asociado a cada brazo de accionamiento con primeras partes de articulación dispuestas separadas entre sí en cada caso de una segunda articulación de rótula, el primer eje de articulación está unido al segundo eje de articulación a través de una pareja de barras de unión con segundas partes de articulación extremas y las segundas partes de articulación extremas de las barras de unión forman, con las primeras partes de articulación sobre el primer eje de articulación y las primeras partes de articulación sobre el segundo eje de articulación, las primeras y segundas articulaciones de rótula, y en donde las barras de unión para estabilizar las articulaciones de rótula están unidas entre sí. En el caso del dispositivo para desplazar y posicionar un objeto en el espacio se trata de un dispositivo designado en el campo técnico como robot con cinemática paralela.
Estado de la técnica
Un dispositivo conocido también bajo el término "robot delta" de la clase antes citada con tres varillajes en paralelogramo se conoce del documento WO-A-03/106114. Las dos barras de unión pertenecientes a un varillaje en paralelogramo de material rígido presentan, en la región de las articulaciones esféricas, pivotes que sobresalen lateralmente por parejas. Juntas tóricas dispuestas por parejas en lados opuestos de las barras de unión y colocadas alrededor de los pivotes, de material elástico de goma, están tensadas elásticamente. Mediante la fuerza de pretensión generada entre las dos barras de unión se sujetan las cazoletas de articulación sobre las rótulas. Además de esto se obtiene mediante la pretensión el momento de retroceso necesario, que impide un giro de las barras a causa de fricción, fuerzas dinámicas y fuerzas causadas por piezas constructivas aplicadas a las barras, como por ejemplo mangueras de vacío. En lugar de juntas tóricas elásticas de goma se utilizan actualmente también muelles dispuestos por parejas. También se conocen del documento US-A-6 419 211 elementos elásticos no emparejados con dos elementos angulares y muelles de compresión dispuestos entre los mismos.
En el caso de sobrecarga, es decir, si las cargas sobre las articulaciones se hacen mayores que las fuerzas de pretensión, se desacoplan las articulaciones, lo que representa una función de seguridad deseada e impide una destrucción del robot.
Supone un inconveniente el hecho de que este desacoplamiento no se reconozca. De este modo siguen desplazándose los brazos de accionamiento del robot delta, incluso si ya se ha desacoplado un varillaje en paralelogramo, lo que conduce a movimientos descontrolados del robot. Las restantes parejas de barras de unión o también el elemento soporte pueden ser lanzadas hacia fuera de forma descontrolada y también resultar dañadas. Debido a que la propia instalación no determina que el robot ya no tiene capacidad de funcionamiento, sigue funcionando dado el caso sin que se tomen las medidas adecuadas, como por ejemplo una parada de toda la instalación o el traspaso de una producción a los robots todavía remanentes.
Es deseable por ello que se reconozca de inmediato un desacoplamiento de una articulación.
En el caso de una solución conocida del documento US 2005/0177279 A1 un sensor de aceleración, inmovilizado sobre el elemento soporte, reconoce un basculamiento del elemento soporte causado por el desacoplamiento de las barras de unión. Esta solución es relativamente cara y necesita un sistema electrónico sobre el elemento soporte, que aumenta su peso. Los cables necesarios representan, en el caso del elevado número de ciclos del robot delta de 200 ciclos/segundo a causa de roturas de cables, un problema añadido con relación a la vida útil. Además de esto los cables pueden resultar dañados durante el desacoplamiento e impedir el desmontaje del robot.
También se ha intentado ya deducir si está completa la estructura del robot a partir de las características dinámicas del robot o de los momentos de accionamiento y de la potencia absorbida por los motores. Sin embargo, debido a que estos parámetros varían también a causa de la carga del robot sobre la pinza de agarre, estas soluciones no son fáciles de implementar.
Del documento US-A-6 516 681 se conoce un robot con cinemática paralela con cuatro varillajes en paralelogramo.
Representación de la invención
La invención se ha impuesto la tarea de equipar un dispositivo de la clase citada al comienzo con medios que, de forma sencilla, hagan posible reconocer de inmediato el desacoplamiento de una articulación de un varillaje en paralelogramo.
A la solución conforme a la invención de la tarea conduce el hecho de que los brazos de accionamiento aislados entre sí eléctricamente, las barras de unión, las partes de articulación de las articulaciones de rótula y el elemento soporte, también llamados porta-herramientas o plataforma, forman partes de un circuito de corriente de vigilancia eléctricamente conductoras o que presentan líneas de señales.
El aislamiento eléctrico de los tres brazos de accionamiento puede realizarse mediante aislamiento con relación a los motores o mediante aislamiento de los motores o de las transmisiones con relación al elemento base del robot.
La señal se aplica directamente, a través de brazos de accionamiento, articulaciones y barras de unión, al elemento soporte y se reenvía de forma correspondiente a los otros varillajes en paralelogramo, en donde estos elementos, como se ha citado anteriormente, están en sí mismos ejecutados de forma conductora o presentan líneas de señales correspondientes.
De este modo se cierra a través de los brazos de accionamiento y las barras en paralelogramo del robot un circuito de corriente de vigilancia/de señales. Para esto se aplica una señal de vigilancia a un brazo de accionamiento y se reenvía, a elección, a través de uno o de los otros dos brazos de accionamiento. La señal puede guiarse con ello directamente a través de las rótulas de articulación y las barras y transmitirse, a través del elemento soporte, a las barras de unión desviadoras.
La señal puede separarse de la masa de máquina mediante un filtrado adecuado, por ejemplo como señal de alta frecuencia a través de un filtro pasabajos/pasaaltos, de tal modo que las piezas constructivas electrostáticas para impedir una carga electrostática pueden estar además conectados a masa, por ejemplo a través de un filtro pasabajos, para garantizar la seguridad de la máquina.
En una primera ejecución conforme a la invención el circuito de corriente de vigilancia conduce desde un brazo de accionamiento a través de las barras de unión, las partes de articulación de las articulaciones de rótula y del elemento soporte, a los otros dos brazos de accionamiento, en donde el elemento soporte se compone de un material eléctricamente conductor.
En el caso de un segundo dispositivo conforme a la invención el circuito de corriente de vigilancia conduce desde un brazo de accionamiento a través de las barras de unión, las partes de articulación de las articulaciones de rótula y del elemento soporte, a los otros dos brazos de accionamiento, en donde el elemento soporte se compone de un material no eléctricamente conductor y al menos dos de las partes de articulación mutuamente adyacentes de las articulaciones de rótula, de varillajes en paralelogramo mutuamente adyacentes, están unidas entre sí a través de una línea eléctrica. El elemento soporte, también llamado porta-herramientas, puede estar por lo tanto ejecutado por ejemplo según el conexionado previsto de forma eléctricamente conductora, o bien de forma eléctricamente aislante con correspondiente unión galvánica entre las rótulas de articulación correspondientes.
Las barras de unión se componen de forma preferida de un material con...
Reivindicaciones:
1. Dispositivo para desplazar y posicionar un objeto en el espacio, con al menos tres brazos de accionamiento (18) unidos en cada caso a una unidad de motor/transmisión (16) y que pueden bascular alrededor de un eje de transmisión (s), un elemento soporte (26) previsto para disponer al menos un medio de agarre para agarrar el objeto, en donde cada brazo de accionamiento (18) presenta en su extremo libre un primer eje de articulación (m) situado en paralelo al eje de transmisión (s), con primeras partes de articulación (22) dispuestas separadas entre sí en cada caso de una primera articulación de rótula (24), el elemento soporte (26) presenta en cada caso un segundo eje de articulación (n) asociado a cada brazo de accionamiento con primeras partes de articulación (32) dispuestas separadas entre sí en cada caso de una segunda articulación de rótula (24), el primer eje de articulación (m) está unido al segundo eje de articulación (n) a través de una pareja de barras de unión (36, 38) con segundas partes de articulación extremas (40, 42) y las segundas partes de articulación extremas (40, 42) de las barras de unión (36, 38) forman, con las primeras partes de articulación (22) sobre el primer eje de articulación (m) y las primeras partes de articulación (32) sobre el segundo eje de articulación (n), las primeras y segundas articulaciones de rótula (24, 34), y en donde las barras de unión (36, 38) para estabilizar las articulaciones de rótula (24, 34) están unidas entre sí, caracterizado porque los brazos de accionamiento (18) aislados entre sí eléctricamente, las barras de unión (36, 38), las partes de articulación (22, 32, 40, 42) de las articulaciones de rótula (24, 34) y el elemento soporte (26) forman partes de un circuito de corriente de vigilancia eléctricamente conductoras o que presentan líneas de señales.
2. Dispositivo según la reivindicación 1, caracterizado porque el circuito de corriente de vigilancia conduce desde un brazo de accionamiento (18) a través de las barras de unión (36, 38), las partes de articulación (22, 32, 40, 42) de las articulaciones de rótula (24, 26) y del elemento soporte (26), a los otros dos brazos de accionamiento (18), en donde el elemento soporte (26) se compone de un material eléctricamente conductor.
3. Dispositivo según la reivindicación 1, caracterizado porque el circuito de corriente de vigilancia conduce desde un brazo de accionamiento (18) a través de las barras de unión (36, 38), las partes de articulación (22, 32, 40, 42) de las articulaciones de rótula (24, 26) y del elemento soporte (26), a los otros dos brazos de accionamiento (18), en donde el elemento soporte (26) se compone de un material eléctricamente conductor y al menos dos de las partes de articulación mutuamente adyacentes de las articulaciones de rótula (34), de varillajes en paralelogramo (44) mutuamente adyacentes, están unidas entre sí a través de una línea eléctrica (52).
4. Dispositivo según una de las reivindicaciones 1 a 3, caracterizado porque las barras de unión (36, 38) se componen de un material con componentes o materiales integrados eléctricamente conductores, por ejemplo de un material de fibras de carbono, de aluminio o de acero.
5. Dispositivo según una de las reivindicaciones 1 a 4, caracterizado porque las segundas partes de articulación (40, 42) están fabricadas con un material cerámico eléctricamente conductor, de forma preferida con SiSiC o con Al2O3-TiN.
6. Dispositivo según una de las reivindicaciones 1 a 5, caracterizado porque las primeras partes de articulación (22, 32) se componen de un material básico eléctricamente conductor, en especial de una aleación de aluminio con tratamiento superficial favorable tribológico, o de un material cerámico eléctricamente conductor, en especial SiSiC o Al2O3-TiN.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Sistema de interacción de robot, del 8 de Abril de 2020, de SMS group GmbH: Procedimiento para el funcionamiento de un sistema de interacción de robot, que está dispuesto en una instalación metalúrgica o de laminación y allí asociado […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Dispositivo automatizado con una estructura móvil, en concreto un robot, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento […]
Cobertura sensorizada para dispositivo industrial, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento (M; […]
Efector final magnético y dispositivo para guiar y posicionar el mismo, del 20 de Noviembre de 2019, de Ovesco Endoscopy AG: Dispositivo de guiado extracorpóreo para un objeto magnético intracorpóreo con un dispositivo de posicionamiento accionado a motor que tiene como máximo tres grados […]
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos, del 9 de Octubre de 2019, de NISSAN MOTOR CO., LTD.: Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de […]