DISPOSITIVO DE MOVIMIENTO PASIVO CONTINUO.
Dispositivo de movimiento pasivo continuo para rehabilitación de una articulación diartrodia y sinovial entre un miembro proximal con una primera superficie articular y un miembro distal con una segunda superficie articular.
El dispositivo comprende medios para inducir un movimiento de flexión-extensión de la articulación y está caracterizado por el hecho de que comprende además medios para inducir un deslizamiento entre ambas superficies articulares, actuando dichos medios sobre uno de los miembros de la articulación, durante el movimiento de flexión-extensión.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131342.
Solicitante: DONAT ROCA, Rafael.
Nacionalidad solicitante: España.
Inventor/es: DONAT ROCA,Rafael, KOCH,Martin Andreas.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61H1/02 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 1/00 Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados . › Aparatos para ejercicios de extensión o flexión.
Fragmento de la descripción:
Dispositivo de movimiento pasivo continuo La presente invención se refiere a dispositivos de movimiento pasivo continuo para terapias de rehabilitación. Concretamente, a un dispositivo para rehabilitación de una articulación diartrodia y sinovial que comprende medios para inducir un movimiento de flexión-extensión de la articulación.
ESTADO DE LA TÉCNICA ANTERIOR
Los dispositivos de movimiento pasivo continuo se utilizan en rehabilitaciones postoperatorias, por ejemplo después de una artrotomía, una reducción abierta de fracturas, una patelectomía, lesiones ligamentosas, sinovectomía, reparación superficial biológica para grandes defectos (con injerto perióstico) , reparación quirúrgica de una sección de tendón, una fijación interna rígida de una osteotomía metafisaria o una prótesis articular total.
En las articulaciones diartrodias o sinoviales (por ejemplo la rodilla o el codo) uno de los huesos posee una superficie articular convexa y el otro tiene una superficie articular cóncava, que ruedan una sobre otra cuando se realiza un movimiento de flexión o extensión de la articulación. Sin embargo, la presencia de ligamentos y tendones hace que al rodamiento o giro angular se superponga, además, un deslizamiento entre ambas superficies articulares.
Por ejemplo, en el caso de la articulación de la rodilla, se trata de un deslizamiento de la superficie articular del fémur con respecto a la superficie articular de la tibia. Este deslizamiento tiene una trayectoria anteroposterior o posteroanterior en el plano sagital, según se trate de extensión o flexión de la pierna respectivamente.
En la técnica anterior existen documentos que describen el movimiento de una articulación como un deslizamiento unido a un giro angular. Los documentos US4665899, US4974830 o US5228432 describen dispositivos que comprenden algún tipo de soporte flotante o pivotante que permite ciertos deslizamientos. Otros sistemas tales como los descritos, por ejemplo, en los documentos US4825852, US4671257 comprenden algún tipo de bisagra especial que permite un giro policéntrico de la articulación.
Sin embargo, los dispositivos conocidos no consiguen reproducir el movimiento articular natural del modo en que lo hace un fisioterapeuta, quien al actuar (con sus manos) sobre la articulación tiene en cuenta tanto el movimiento de flexión/extensión como el deslizamiento, para que el ejercicio pasivo que se realiza con el paciente sea satisfactorio.
EXPLICACIÓN DE LA INVENCIÓN
El objetivo de la presente invención es mejorar, al menos parcialmente, el rendimiento de la rehabilitación que se realiza con dispositivos de movimiento pasivo continuo.
Un aspecto de la invención describe un dispositivo de movimiento pasivo continuo para rehabilitación de una articulación diartrodia y sinovial entre un miembro proximal con una primera superficie articular y un miembro distal con una segunda superficie articular, comprendiendo el dispositivo medios para inducir un movimiento de flexión-extensión de la articulación, caracterizado por el hecho de que comprende además medios para inducir un deslizamiento entre ambas superficies articulares, actuando dichos medios sobre uno de los miembros de la articulación, durante el movimiento de flexión-extensión.
Según este aspecto, los medios para inducir un deslizamiento entre ambas superficies articulares imprimen un empuje externo directamente sobre uno de los miembros de la articulación, durante el movimiento de flexión-extensión. En consecuencia, permiten reproducir con mayor fidelidad el movimiento articular natural, de manera similar a lo que haría un fisioterapeuta imprimiendo dicho empuje o fuerza externa con sus manos. Por tanto, mejoran al menos parcialmente el rendimiento de la rehabilitación.
En algunas realizaciones, los medios para inducir un deslizamiento y los medios para inducir el movimiento de flexiónextensión pueden actuar de manera sincronizada. Esta sincronización contribuye positivamente para que, en la articulación, el movimiento de flexión-extensión esté acompañado de un deslizamiento entre ambas superficies articulares.
En algunas realizaciones, los medios para inducir un deslizamiento pueden comprender unos primeros medios que pueden actuar sobre el miembro proximal de la articulación.
En algunas realizaciones, los medios para inducir un movimiento de flexión-extensión pueden comprender un primer punto de pivote que, en funcionamiento, puede estar asociado a un extremo proximal del miembro proximal de la articulación y los primeros medios para inducir un deslizamiento pueden comprender un primer apoyo para el miembro proximal. Un extremo de dicho primer apoyo puede estar montado, de manera pivotante, en el primer punto de pivote de los medios para inducir un movimiento de flexión-extensión. De esta manera el primer apoyo induce el deslizamiento mediante una rotación alrededor del extremo proximal del miembro proximal. Por ejemplo, en la rodilla donde el miembro proximal es el fémur y el miembro distal es la tibia, los primeros medios inducen una rotación alrededor de la articulación de la cadera cuando el dispositivo se emplea en la rehabilitación (flexión-extensión) de la rodilla.
En algunas realizaciones, el primer apoyo puede ser accionado a partir de un primer elemento desplazable dispuesto en la base del dispositivo, pudiendo ser el primer elemento desplazable longitudinalmente en la dirección del movimiento de flexión-extensión.
En algunas de estas realizaciones, el primer apoyo puede ser accionado a partir del primer elemento desplazable, a través de una barra rígida o un cilindro hidráulico doblemente articulados. En otras, el primer apoyo puede ser accionado a través de un cilindro hidráulico que puede estar montado entre un extremo de dicho primer apoyo y un punto de pivote de los medios para inducir el movimiento de flexión-extensión que, en funcionamiento, puede estar asociado a la articulación propiamente dicha.
En algunas realizaciones, el primer elemento desplazable puede estar unido a un segundo elemento desplazable longitudinalmente en la dirección del movimiento de flexión-extensión que acciona los medios para inducir el movimiento de flexión-extensión. Esta es una de las maneras para conseguir que los primeros medios para inducir un deslizamiento y los medios para inducir el movimiento de flexión-extensión actúen de manera sincronizada.
En algunas realizaciones, los medios para inducir un deslizamiento entre ambas superficies articulares de la articulación pueden comprender unos segundos medios para inducir un deslizamiento. Dichos segundos medios pueden actuar sobre el miembro distal de la articulación, durante el movimiento de flexión-extensión. En algunos casos puede ser preferible inducir el deslizamiento sobre el miembro distal; si además se incluyen tanto los primeros medios como los segundos medios para inducir un deslizamiento, se puede conseguir mejorar la precisión con la cual se reproduce el movimiento articular natural.
En algunas realizaciones los segundos medios para inducir un deslizamiento pueden comprender un segundo apoyo para dicho miembro distal. Un extremo de dicho segundo apoyo puede estar montado, de manera pivotante, en un segundo punto de pivote de los medios para inducir el movimiento de flexión-extensión que, en funcionamiento, puede estar asociado a un extremo distal del miembro distal de la articulación. De esta manera el segundo apoyo induce el deslizamiento mediante una rotación alrededor del extremo distal del miembro distal. Por ejemplo, en la rodilla, los segundos medios inducen una rotación alrededor de la articulación del tobillo cuando el dispositivo se emplea en la rehabilitación (flexión-extensión) de la rodilla.
En algunas realizaciones, el segundo apoyo puede ser accionado a partir de un tercer elemento desplazable longitudinalmente en la dirección del movimiento de flexión-extensión. Dicho tercer elemento desplazable puede estar dispuesto en una base del dispositivo.
En algunas realizaciones, el segundo apoyo puede ser accionado a partir del tercer elemento desplazable a través de una barra rígida o un cilindro hidráulico doblemente articulados.
En algunas realizaciones, el primer elemento desplazable y el tercer elemento desplazable pueden actuar de manera sincronizada. Esta sincronización contribuye en la precisión del deslizamiento inducido entre ambas superficies articulares.
En algunas realizaciones, el primer elemento desplazable y el tercer elemento desplazable pueden ser el mismo elemento desplazable. Esta es una de las maneras para conseguir que los primeros medios para inducir un deslizamiento y los segundos medios para inducir...
Reivindicaciones:
1. Dispositivo de movimiento pasivo continuo para rehabilitación de una articulación diartrodia y sinovial entre un miembro proximal con una primera superficie articular y un miembro distal con una segunda superficie articular, comprendiendo el dispositivo medios para inducir un movimiento de flexión-extensión (50) de la articulación, caracterizado por el hecho de que comprende además medios para inducir un deslizamiento (10; 20) entre ambas superficies articulares, actuando dichos medios (10; 20) sobre uno de los miembros de la articulación, durante el movimiento de flexión-extensión.
2. Dispositivo de movimiento pasivo continuo según la reivindicación 1, caracterizado por el hecho de que los medios para inducir un deslizamiento (10; 20) y los medios para inducir el movimiento de flexión-extensión (50) actúan de manera sincronizada.
3. Dispositivo de movimiento pasivo continuo según una de las reivindicaciones 1 ó 2, caracterizado por el hecho de que los medios para inducir un deslizamiento (10; 20) comprenden unos primeros medios (10) que actúan sobre el miembro proximal de la articulación.
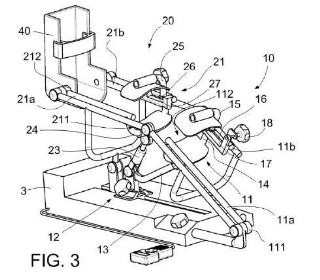
4. Dispositivo de movimiento pasivo continuo según una cualquiera de las reivindicaciones 1 a 3, caracterizado por el hecho de que los medios para inducir un movimiento de flexión-extensión (50) comprenden un primer punto de pivote (30a) que, en funcionamiento, está asociado a un extremo proximal del miembro proximal de la articulación y los primeros medios para inducir un deslizamiento (10) comprenden un primer apoyo (11) para el miembro proximal, estando montado un extremo de dicho primer apoyo, de manera pivotante, en dicho primer punto de pivote (30a) .
5. Dispositivo de movimiento pasivo continuo según la reivindicación 4, caracterizado por el hecho de que el primer apoyo (11) es accionado a partir de un primer elemento desplazable (12) dispuesto en la base del dispositivo (3) , siendo dicho primer elemento desplazable longitudinalmente en la dirección del movimiento de flexión-extensión.
6. Dispositivo de movimiento pasivo continuo según la reivindicación 5, caracterizado por el hecho de que el primer apoyo (11) es accionado a partir del primer elemento desplazable (12) a través de una barra rígida (13) o un cilindro hidráulico (19) doblemente articulados.
7. Dispositivo de movimiento pasivo continuo según la reivindicación 4, caracterizado por el hecho de que el primer apoyo (11) es accionado a través de un cilindro hidráulico (19a) montado entre un extremo del primer apoyo (11) y un punto de pivote de los medios para inducir el movimiento de flexión-extensión que, en funcionamiento, está asociado a la articulación.
8. Dispositivo de movimiento pasivo continuo según una de las reivindicaciones 5 a 6, caracterizado por el hecho de que el primer elemento desplazable (12) está unido a un segundo elemento desplazable (4) longitudinalmente en la dirección del movimiento de flexión-extensión que acciona los medios para inducir el movimiento de flexión-extensión.
9. Dispositivo de movimiento pasivo continuo según una de las reivindicaciones 1 a 8, caracterizado por el hecho de que los medios para inducir un deslizamiento entre ambas superficies articulares de la articulación comprenden unos segundos medios (20) que actúan sobre el miembro distal de la articulación, durante el movimiento de flexiónextensión.
10. Dispositivo de movimiento pasivo continuo según la reivindicación 9, caracterizado por el hecho de que los segundos medios para inducir un deslizamiento (20) comprenden un segundo apoyo (21) para dicho miembro distal, estando montado un extremo de dicho segundo apoyo, de manera pivotante, en un segundo punto de pivote (30c) de los medios para inducir el movimiento de flexión-extensión (50) que, en funcionamiento, está asociado a un extremo distal del miembro distal de la articulación.
11. Dispositivo de movimiento pasivo continuo según la reivindicación 10, caracterizado por el hecho de que el segundo apoyo (21) es accionado a partir de un tercer elemento desplazable (29) longitudinalmente en la dirección del movimiento de flexión-extensión, estando dicho tercer elemento desplazable (29) dispuesto en una base del dispositivo (3) .
12. Dispositivo de movimiento pasivo continuo según la reivindicación 11, caracterizado por el hecho de que el segundo apoyo (21) es accionado a partir del tercer elemento desplazable (29) a través de una barra rígida (23a) o un cilindro hidráulico (23) doblemente articulados.
13. Dispositivo de movimiento pasivo continuo según una de las reivindicaciones 11 ó 12, caracterizado por el hecho de que el primer elemento desplazable (12) y el tercer elemento desplazable (29) actúan de manera sincronizada.
14. Dispositivo de movimiento pasivo continuo según una cualquiera de las reivindicaciones 11 a 13, caracterizado por el hecho de que el primer elemento desplazable y el tercer elemento desplazable son el mismo elemento desplazable.
15. Dispositivo de movimiento pasivo continuo según la reivindicación 10, caracterizado por el hecho de que el segundo
apoyo (21) es accionado a través de un cilindro hidráulico (23b) montado entre un extremo del segundo apoyo (21) y un punto de pivote de los medios para inducir el movimiento de flexión-extensión que, en funcionamiento, está asociado a la articulación.
16. Dispositivo de movimiento pasivo continuo según una de las reivindicaciones 4 a 15, caracterizado por el hecho de que cada apoyo (11; 21) comprende una pieza inferior (14, 24) en forma de “U” y una pieza superior (15, 25) en forma de “L” conectada por uno de sus extremos al apoyo (11, 21) , estando la pieza superior (15, 25) montada de manera
deslizante sobre el apoyo (11, 21) de manera de ajustarse a la longitud de los miembros que soportan.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo de estiramiento de fascia plantar y tendón de aquiles, del 29 de Julio de 2020, de RODRÍGUEZ SANZ, David: 1. Dispositivo de estiramiento de la fascia plantar y el tendón de Aquiles caracterizado porque comprende una pieza semicircular como apoyo del pie con dos […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Aparato de terapia, del 8 de Julio de 2020, de Lime Medical GmbH: Aparato de terapia para realizar un movimiento continuo, pasivo y/o asistido activamente de los dedos y del pulgar de la mano de un paciente, que comprende: […]
Sistema electromédico automatizado y método de gestión relacionado, del 1 de Julio de 2020, de Lauro Group S.r.l: Sistema electromédico automatizado para tratar, curar, analizar y monitorizar una pluralidad de condiciones médicas relacionadas con la columna […]
DISPOSITIVO DE REHABILITACIÓN PARA LAS EXTREMIDADES INFERIORES, del 25 de Junio de 2020, de HOSPITAL SANT JOAN DE DEU: El dispositivo de rehabilitación para las extremidades inferiores comprende un suspensor para colocar un arnés para un usuario del dispositivo de rehabilitación […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]