Dispositivo de estimación de distancia.
Un dispositivo (12) de estimación de distancia para ser utilizado en un sistema anticolisión (11) en unaplataforma aérea (1),
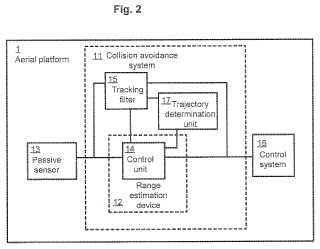
comprendiendo dicho sistema anticolisión (11) una unidad (17) de determinación de latrayectoria y un filtro (15) de seguimiento del blanco para seguir un blanco (3) para recuperar un rumbo quecomprende el azimut y la elevación hasta el blanco (3) en base a la salida de al menos un sensor pasivo (13)de cámara o de cámara IR y al calcular una estimación de distancia y estimaciones de distancias deincertidumbre hasta el blanco (3) en base a dichos datos de rumbo y de posición de la unidad (17) dedeterminación de la trayectoria, en el que dicho dispositivo (12) de estimación de distancia comprendeuna unidad (14) de control dispuesta para indicar a un sistema (16) de control de dicha plataforma aérea (1)que ejecute una maniobra de la propia aeronave de dicha plataforma aérea (1), de forma que lascaracterísticas de las mediciones de los sensores pasivos procedentes de dicho al menos un sensor pasivo(13) de cámara o cámara IR permitan que se determinen las estimaciones de distancia y las estimaciones dedistancia de incertidumbre hasta el blanco (3);
caracterizado porque
dicha unidad (14) de control está dispuesta, además, para indicar al sistema (16) de control que ejecute unamaniobra de la propia aeronave de dicha plataforma aérea (1) si las estimaciones de distancia de incertidumbrese encuentran por encima de un nivel predeterminado de aceptación de las estimaciones de distancia deincertidumbre y las velocidades de cambio angular azimutal y de elevación del blanco (3) se encuentran pordebajo de un límite de velocidad angular establecido teniendo en cuenta la distancia mínima estimada hasta elblanco (3).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08168902.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: SUNDQVIST,BENGT-GORAN, Petrini,Erik, MOLANDER,SÖREN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G05D1/10 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
PDF original: ES-2409210_T3.pdf
Fragmento de la descripción:
Dispositivo de estimación de distancia
Campo técnico
La invención versa, en general, acerca de un dispositivo de estimación de distancia y, en particular, acerca de un dispositivo de estimación de distancia según el preámbulo de la reivindicación 1. La invención también versa acerca de un sistema anticolisión y acerca de una plataforma aérea que comprende el dispositivo de estimación de distancia.
La invención versa, además, acerca de un procedimiento para ser utilizado en un dispositivo de estimación de distancia según el preámbulo de la reivindicación 14, y acerca de un producto de programa de ordenador según el preámbulo de la reivindicación 21.
Antecedentes El espacio aéreo disponible utilizado tanto por aeronaves civiles como militares en la actualidad está cada vez más atestado cada año. Como resultado, existe la necesidad inminente de sistemas automáticos de a bordo capaces de detectar posibles amenazas de colisión y de permitir la maniobra de la aeronave alejándose de tales amenazas de colisión en el aire. Tales sistemas automáticos de a bordo son denominados, en general, sistemas anticolisión, y son especialmente vitales para aeronaves autónomas, tales como, por ejemplo, vehículos aéreos no tripulados (UAV) en los que no hay piloto a bordo.
Los vehículos aéreos no tripulados (UAV) dependen de su sistema anticolisión para detectar posibles amenazas de colisión para que el sistema pueda calcular una trayectoria óptima de escape, y maniobrar en consecuencia la plataforma aérea autónoma, alejándola de la posible amenaza de colisión. El documento US 6.510.388 describe un sistema para la evitación de colisiones entre vehículos. El sistema puede calcular y almacenar una trayectoria de maniobra para un vehículo, que el vehículo está obligado a seguir si una comparación muestra que la trayectoria de maniobra de evasión de un vehículo en cualquier momento durante su lapso calculado está ubicada a una distancia de otros vehículos que es menor que una distancia mínima estipulada.
Un sistema anticolisión puede estar basado en sensores pasivos montados en la aeronave, tales como, por ejemplo, una cámara de vídeo. Las ventajas de utilizar una cámara de vídeo son numerosas, tales como, por ejemplo, la posibilidad de conseguir números elevados de fotogramas por segundo, una resolución muy alta, y una sensibilidad que es similar a la del ojo humano, o mejor que la del mismo. Al utilizar una cámara de vídeo pasiva es posible conseguir un seguimiento de blancos que es denominado “seguimiento solo de rumbo”. Esto es debido a que el rumbo de un blanco es recuperable de las salidas de la cámara de vídeo pasiva. Se puede calcular a partir del rumbo un valor de “tiempo restante”, o valor TTG. El valor de TTG puede informar al sistema anticolisión del tiempo restante mínimo hasta que se pueda alcanzar el blanco detectado. Entonces, se puede utilizar el valor de TTG para calcular una trayectoria de escape. Por desgracia, a menudo el resultado de tales cálculos es impreciso y aproximado.
O. Shakeria, W. Chen y V.M. Raska, en “Passive ranging for UAV Sense and Avoid Applications”, AIAA-2005-7179978, investigan la viabilidad de estimar la distancia y velocidad de otro tráfico aéreo al llevar a cabo una pequeña maniobra de la propia aeronave.
Resumen Un problema acerca del que versa la invención es cómo conseguir las estimaciones de distancia hasta un blanco a partir de entradas de un sensor pasivo que sean precisas y fiables.
Este problema es abordado por un dispositivo de estimación de distancia para ser utilizado en una plataforma aérea que comprende al menos un sensor pasivo, una unidad de determinación de la trayectoria y un sistema de control, comprendiendo dicho dispositivo de estimación de distancia una unidad de control dispuesta para indicar a dicho sistema de control que ejecute una maniobra de la propia aeronave de dicha plataforma aérea, de forma que las características de medición de los sensores pasivos desde dicho al menos un sensor pasivo permiten que se determine una estimación de distancia hasta un blanco; caracterizado porque la unidad de control está dispuesta, además, para determinar las características de dicha maniobra de la propia aeronave en base a estimaciones de distancia de incertidumbre hasta dicho blanco.
El problema también es abordado por medio de un procedimiento para ser utilizado en un dispositivo de estimación de distancia en una plataforma aérea que comprende al menos un sensor pasivo, una unidad de determinación de la trayectoria y un sistema de control, en el que dicho dispositivo de estimación de distancia comprende una unidad de control dispuesta para llevar a cabo la etapa de: indicar a dicho sistema de control que ejecute una maniobra de la propia aeronave de dicha plataforma aérea, de forma que las características de las mediciones de los sensores pasivos desde dicho al menos un sensor pasivo permitan que se determine una estimación de distancia hasta un blanco; caracterizándose dicho procedimiento por la etapa de: determinar las características de dicha maniobra de la 2 10
propia aeronave de una plataforma aérea en base a estimaciones de distancia de incertidumbre de dicha estimación de distancia hasta dicho blanco.
El problema es abordado, además, por medio de un producto de programa de ordenador para ser utilizado en un dispositivo de estimación de distancia, en el que dicho dispositivo de estimación de distancia comprende un medio de código legible por un ordenador, que cuando es ejecutado en una unidad de control en dicho dispositivo de estimación de distancia hace que dicho dispositivo de estimación de distancia lleve a cabo la etapa de: determinar las características de la maniobra de la propia aeronave de una plataforma aérea en base a estimaciones de distancia de incertidumbre hasta un blanco.
Al hacer que la plataforma aérea ejecute una maniobra de la propia aeronave, el dispositivo de estimación de distancia puede conseguir estimaciones de distancia y estimaciones de distancia de incertidumbre asociadas hasta un blanco a partir de las entradas de sensores pasivos. Sin embargo, al utilizar las estimaciones de distancia de incertidumbre para determinar las características de la maniobra de la propia aeronave de la plataforma aérea, el dispositivo de estimación de distancia según la invención puede proporcionar estimaciones más precisas y fiables de distancia, por ejemplo, en un sistema anticolisión. Esto es debido a que la maniobra de la propia aeronave generará mejores condiciones para determinar estimaciones de distancia.
Una ventaja de la invención descrita anteriormente es que al proporcionar estimaciones más precisas y fiables de distancia y, por lo tanto, valores más precisos de TTG, que permiten ambos subsiguientemente un cálculo tanto de la posición como de la velocidad del blanco detectado, se mejora significativamente la determinación de una trayectoria adecuada de escape y un punto en el tiempo para activar un procedimiento de evasión para evitar una colisión en el aire en un sistema anticolisión. Esto reduce el riesgo de que la plataforma aérea tenga que ejecutar maniobras de pánico.
Otra ventaja de la invención descrita anteriormente es que utiliza sensores pasivos ya incorporados en la plataforma aérea y utilizados por el sistema anticolisión. Esto consigue una solución no costosa que no requiere equipos adicionales costosos y pesados.
Una ventaja adicional de la invención descrita anteriormente es que puede ser utilizada como un sistema de reserva en una plataforma aérea equipada con un transpondedor en el caso de un fallo del transpondedor.
El dispositivo de estimación de distancia puede comprender una unidad de control dispuesta, además, para indicar al sistema de control, si la estimación de distancia de incertidumbre se encuentra por encima de un nivel predeterminado de aceptación de la distancia de incertidumbre, para ejecutar una maniobra continua a ralentí de la propia aeronave de la plataforma aérea en la que se ejecutan maniobras más grades laterales y/o de ascensióndescenso, en la que se pueden combinar dichas maniobras más grades laterales y/o de ascensión-descenso con un movimiento de balanceo y/o se entrelazan con un movimiento de giro en picado. Se pueden ejecutar las maniobras más grades laterales y/o de ascensión-descenso utilizando los modos lateral y/o longitudinal de vuelo básico de la plataforma aérea. Estas características pueden proporcionar la ventaja de proporcionar estimaciones precisas y fiables de distancia sin tener que ejecutar ninguna maniobra inmediata o repentina de la propia aeronave.
Además, el dispositivo de estimación... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo (12) de estimación de distancia para ser utilizado en un sistema anticolisión (11) en una plataforma aérea (1) , comprendiendo dicho sistema anticolisión (11) una unidad (17) de determinación de la trayectoria y un filtro (15) de seguimiento del blanco para seguir un blanco (3) para recuperar un rumbo que comprende el azimut y la elevación hasta el blanco (3) en base a la salida de al menos un sensor pasivo (13) de cámara o de cámara IR y al calcular una estimación de distancia y estimaciones de distancias de incertidumbre hasta el blanco (3) en base a dichos datos de rumbo y de posición de la unidad (17) de determinación de la trayectoria, en el que dicho dispositivo (12) de estimación de distancia comprende una unidad (14) de control dispuesta para indicar a un sistema (16) de control de dicha plataforma aérea (1)
que ejecute una maniobra de la propia aeronave de dicha plataforma aérea (1) , de forma que las características de las mediciones de los sensores pasivos procedentes de dicho al menos un sensor pasivo (13) de cámara o cámara IR permitan que se determinen las estimaciones de distancia y las estimaciones de distancia de incertidumbre hasta el blanco (3) ;
caracterizado porque dicha unidad (14) de control está dispuesta, además, para indicar al sistema (16) de control que ejecute una maniobra de la propia aeronave de dicha plataforma aérea (1) si las estimaciones de distancia de incertidumbre se encuentran por encima de un nivel predeterminado de aceptación de las estimaciones de distancia de incertidumbre y las velocidades de cambio angular azimutal y de elevación del blanco (3) se encuentran por debajo de un límite de velocidad angular establecido teniendo en cuenta la distancia mínima estimada hasta el
blanco (3) .
2. Un dispositivo (12) de estimación de distancia según la reivindicación 1, en el que dicha unidad (14) de control está dispuesta para indicar a dicho sistema (16) de control, si la estimación de distancia de incertidumbre se encuentra por encima de un nivel predeterminado de aceptación de la distancia de incertidumbre, para ejecutar una maniobra continua a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave de la plataforma aérea (1) en el
que se ejecutan maniobras más grades laterales y/o de ascensión-descenso.
3. Un dispositivo (12) de estimación de distancia según la reivindicación 2, en el que se combinan dichas maniobras más grades laterales y/o de ascensión-descenso de la maniobra continua a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave de la plataforma aérea (1) con un movimiento de balanceo y/o se entrelazan con un movimiento de giro en picado.
4. Un dispositivo (12) de estimación de distancia según la reivindicación 2 o 3, en el que dichas maniobras más grades laterales y/o de ascensión-descenso de la maniobra continua a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave de la plataforma aérea (1) utiliza los modos lateral y/o longitudinal de vuelo básico de la plataforma aérea (1) .
5. Un dispositivo (12) de estimación de distancia según las reivindicaciones 1-4, en el que dicha unidad (14) de control está dispuesta para indicar a dicho sistema (16) de control, si la estimación de distancia de incertidumbre se encuentra por encima de un nivel predeterminado de aceptación de la distancia de incertidumbre y si la velocidad de cambio de la estimación de distancia de incertidumbre se encuentra por debajo de un nivel aceptable predeterminado para la velocidad de cambio, de que se debería aumentar la aceleración del movimiento de dicha maniobra continua a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave de la plataforma aérea (1) .
6. Un dispositivo (12) de estimación de distancia según la reivindicación 5, en el que dicho aumento de la aceleración del movimiento de dicha maniobra a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave está indicado por medio de dicha unidad (14) de control hasta que la estimación de distancia de incertidumbre se encuentre por debajo del nivel predeterminado de aceptación de la distancia de incertidumbre; y/o la velocidad
de cambio de la distancia de incertidumbre se encuentre por encima del nivel aceptable predeterminado para la velocidad de cambio; y/o se alcance un valor límite para la aceleración del movimiento de dicha maniobra a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave.
7. Un dispositivo (12) de estimación de distancia según la reivindicación 6, en el que dicho valor límite es el valor máximo de la aceleración del movimiento de dicha maniobra de la propia aeronave, de forma que se sigue 50 manteniendo el blanco (3) en el campo de estimación [FOR] del al menos un sensor pasivo (13) de cámara o cámara IR.
8. Un dispositivo (12) de estimación de distancia según la reivindicación 6 o 7, en el que dicho valor límite para la aceleración del movimiento es una base a las limitaciones de la capacidad de maniobra del sistema (14) de control y de las molestas limitaciones establecidas por el control del tráfico aéreo (ATC) .
9. Un dispositivo (12) de estimación de distancia según la reivindicación 1, en el que dicha unidad (14) de control está dispuesta para indicar a dicho sistema (16) de control que ejecute una aceleración cinemática de la maniobra de la propia aeronave, de forma que el blanco (3) permanezca en el área cubierta por el FOR (60) del al menos un sensor pasivo (13) de cámara o cámara IR.
10. Un dispositivo (12) de estimación de distancia según la reivindicación 9, que comprende, además, un sistema de coordenadas fijas de la propia aeronave con referencia a la tierra, tal como un sistema de coordenadas norte-este-abajo [NED], que determina un ángulo azimutal (71) , un ángulo de elevación (72) y un vector (73) de línea visual [LOS] hasta dicho blanco (3) a partir de dichas mediciones de los sensores pasivos, y
en el que dicha unidad (14) de control está dispuesta para indicar a dicho sistema (16) de control que ejecute dicha aceleración cinemática de la maniobra de la propia aeronave sustancialmente en una dirección negativa de las velocidades de cambio angulares azimutal (71) y de elevación (72) , cuando se proyecta sobre un plano que tiene el vector (73) de la línea visual hasta el blanco (3) como una normal, cuando el blanco (3) se encuentra en un sector (80) orientado hacia delante del FOR (60) del al menos un sensor pasivo (13) de cámara o cámara IR.
11. Un dispositivo (12) de estimación de distancia según la reivindicación 10, en el que dicha unidad (14) de control está dispuesta para indicar a dicho sistema (16) de control que gire dicha aceleración cinemática de dicha maniobra de la propia aeronave, de forma que sea paralela a los límites superior (61) e inferior (62) del FOR
(60) de dicho al menos un sensor pasivo (13) de cámara o cámara IR, si dicha aceleración cinemática de dicha maniobra de la propia aeronave hace que el blanco (3) salga del FOR del al menos un sensor pasivo (13) de cámara o cámara IR.
12. Un sistema anticolisión (11) que comprende un dispositivo (12) de estimación de distancia según las reivindicaciones 1-11.
13. Una plataforma aérea (1) que comprende un dispositivo (12) de estimación de distancia según las 20 reivindicaciones 1-11 o un sistema anticolisión (11) según la reivindicación 12.
14. Un procedimiento para ser utilizado en un dispositivo (12) de estimación de distancia en un sistema anticolisión (11) en una plataforma aérea (1) , comprendiendo dicho sistema anticolisión (11) una unidad (17) de determinación de la trayectoria y un filtro (15) de seguimiento del blanco para seguir un blanco (3) al recuperar un rumbo que comprende el azimut y la elevación hasta el blanco (3) en base a la salida de al menos un sensor pasivo (13) de cámara o cámara IR y al calcular una estimación de distancia y estimaciones de distancia de incertidumbre hasta el blanco (3) en base a dichos datos de rumbo y de posición de la unidad (17) de determinación de la trayectoria, en el que dicho dispositivo (12) de estimación de distancia comprende una unidad (14) de control dispuesta para ejecutar la etapa de:
-indicar a un sistema (16) de control de dicha plataforma aérea (1) que ejecute una maniobra de la propia
aeronave de dicha plataforma aérea (1) , de forma que las características de las mediciones de los sensores pasivos procedentes de dicho al menos un sensor pasivo (13) de cámara o cámara IR permitan que se determinen las estimaciones de distancia y las estimaciones de distancia de incertidumbre hasta el blanco (3) ; estando caracterizado dicho procedimiento por
la etapa de: -indicar al sistema (16) de control que ejecute una maniobra de la propia aeronave de dicha plataforma aérea (1) si las estimaciones de distancia de incertidumbre se encuentran por encima de un nivel predeterminado de aceptación de las estimaciones de distancia de incertidumbre y las velocidades de cambio angulares azimutal y de elevación del blanco (3) se encuentran por debajo de un límite de velocidad angular establecido teniendo en cuenta la distancia estimada mínima hasta el blanco (3) .
15. Un procedimiento según la reivindicación 14, que comprende, además, la etapa de:
-si la distancia de incertidumbre se encuentra por encima de un nivel predeterminado de aceptación de la distancia de incertidumbre, indicar a dicho sistema (16) de control que ejecute una maniobra continua a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave de la plataforma aérea (1) .
16. Un procedimiento según la reivindicación 15, que comprende, además, la etapa de:
-si la distancia de incertidumbre se encuentra por encima de un nivel predeterminado de aceptación de la distancia de incertidumbre, y si la velocidad de cambio de la distancia de incertidumbre se encuentra por debajo de un nivel aceptable predeterminado para la velocidad de cambio, indicar a dicho sistema (16) de control que se debería aumentar la aceleración del movimiento de dicha maniobra continua a ralentí
(C, C1, C2; C, C3, C4) de la propia aeronave de la plataforma aérea (1) .
17. Un procedimiento según la reivindicación 16, que comprende, además, la etapa de indicar a dicho sistema (16) de control que aumente la aceleración del movimiento de dicha maniobra a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave hasta que:
-la estimación de distancia de incertidumbre se encuentre por debajo del nivel predeterminado de 55 aceptación de la distancia de incertidumbre; y/o
-la velocidad de cambio de la distancia de incertidumbre se encuentre por encima del nivel aceptable predeterminado para la velocidad de cambio; y/o
-se alcance un valor límite para la aceleración del movimiento de dicha maniobra a ralentí (C, C1, C2; C, C3, C4) de la propia aeronave.
18. Un procedimiento según la reivindicación 14, que comprende, además, la etapa de:
-ejecutar una aceleración cinemática de la maniobra de la propia aeronave, de forma que el blanco (3) permanece en el área cubierta por el FOR (60) del al menos un sensor pasivo (13) de cámara o cámara IR.
19. Un procedimiento según la reivindicación 18, que comprende, además, la etapa de:
- ejecutar dicha aceleración cinemática de la maniobra de la propia aeronave sustancialmente en una dirección negativa de las velocidades de cambio angular azimutal (71) y de elevación (72) , cuando se proyecta sobre un plano que tiene el vector (73) de la línea visual hasta el blanco (3) como una normal, cuando el blanco (3) se encuentra en un sector (80) orientado hacia delante del FOR (60) del al menos un sensor pasivo (13) de cámara o cámara IR.
20. Un procedimiento según la reivindicación 18, que comprende, además, la etapa de:
-girar dicha aceleración cinemática de dicha maniobra de la propia aeronave, de forma que sea paralela a los límites superior (61) e inferior (62) del FOR (60) de dicho al menos un sensor pasivo (13) de cámara o cámara IR, si dicha aceleración cinemática de dicha maniobra de la propia aeronave hace que el blanco (3) salga del FOR (60) del al menos un sensor pasivo (13) de cámara o cámara IR.
21. Un producto de programa de ordenador para ser utilizado en un dispositivo (12) de estimación de distancia en un sistema anticolisión (11) en una plataforma aérea (1) , comprendiendo dicho sistema anticolisión (11) una unidad (17) de determinación de la trayectoria y un filtro (15) de seguimiento del blanco para seguir un blanco (3) al recuperar un rumbo que comprende el azimut y la elevación hasta el blanco (3) en base a la salida del al
menos un sensor pasivo (13) de cámara o cámara IR y al calcular una estimación de distancia y estimaciones 25 de distancia de incertidumbre hasta el blanco (3) en base a dichos datos de rumbo y de posición de la unidad
(17) de estimación de la trayectoria, en el que dicho dispositivo (12) de estimación de distancia comprende un medio de código legible por un ordenador, que cuando es ejecutado en una unidad (14) de control en dicho dispositivo (12) de estimación de distancia hace que dicho dispositivo (12) de estimación de distancia ejecute la etapa de:
- indicar a un sistema (16) de control que ejecute una maniobra de la propia aeronave de dicha plataforma aérea (1) si las estimaciones de distancia de incertidumbre se encuentran por encima de un nivel predeterminado de aceptación de las estimaciones de distancia de incertidumbre y las velocidades de cambio angular azimutal y de elevación del blanco (3) se encuentran por debajo de un límite de velocidad angular establecido teniendo en cuenta la distancia estimada mínima hasta un blanco (3) .
22. Un producto de programa de ordenador según la reivindicación 21, que comprende un medio de código legible por ordenador, que cuando es ejecutado en la unidad (14) de control hace que el dispositivo (12) de estimación de distancia ejecute, además, las etapas según las reivindicaciones 14-20.
23. Un producto de programa de ordenador según la reivindicación 21 o 22, en el que dicho medio de código es almacenado en un medio de almacenamiento legible.
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Módulo de función de seguridad para un vehículo, del 12 de Febrero de 2020, de MBDA Deutschland GmbH: Módulo de función de seguridad para un vehículo , que comprende: una unidad de determinación de estado que está configurada […]
Procedimiento y dispositivo de navegación autónoma, del 1 de Enero de 2020, de ALERION TECHNOLOGIES, S.L: Un procedimiento de navegación autónoma para rastrear objetos de una turbina eólica, comprendiendo el procedimiento: - calibrar un sensor de visión artificial y un sensor […]
Procedimiento y sistema para el guiado, en la fase terminal, de un misil interceptor hacia un objetivo aéreo móvil, del 11 de Diciembre de 2019, de MBDA FRANCE: Procedimiento para el guiado, en la fase terminal de un misil interceptor hacia un objetivo aéreo, incluyendo dicho misil interceptor: · instrumentos de abordo […]