Dispositivo de control de coche eléctrico.
Un dispositivo de control de vehículo eléctrico, que controla vectorialmente un motor de inducción (3 a,
3b, 3c y 3d)mediante un dispositivo inversor (1), cuyo dispositivo de control de vehículo eléctrico comprende:
una unidad de control vectorial (2) para calcular una intensidad de corriente I1q en el eje q, una intensidadde corriente I1d en el eje d, una orden de tensión E1qr en el eje q, una orden de tensión E1dr en el eje d, yuna frecuencia angular ωinv de inversor del motor de inducción (3 a, 3b, 3c, 3d); y.
una unidad de cálculo de par (5) para calcular el par del motor de inducción (3 a, 3b, 3c, 3d) basándose enla intensidad de corriente I1q en el eje q, intensidad de corriente I1d en el eje d, orden de tensión E1qr en eleje q, orden de tensión E1dr en el eje d, y en la frecuencia angular ωinv de inversor; caracterizado porquecomprende.
una unidad (6) de cálculo de la anchura de variación de par para calcular la anchura de variación &Delta,Tqcal ≥Tqmax- Tqmin a partir de un valor máximo Tqmax y de un valor mínimo Tqmin de un resultado del cálculo de paren una anchura de tiempo predeterminada (Tw, Tw1, Tw2. Tw3) basándose en el resultado del cálculo depar que se calcula mediante de la unidad (5) de cálculo del par; y un comparador (7) para comparar laanchura de variación de par que se calcula mediante la unidad (6) de cálculo de anchura de variación de parcon un valor de referencia predeterminado ΔTqref de anchura de variación de par para entregar como salidauna señal de detección de desconexión cuando la anchura de variación de par excede al valor de referenciaΔTqref.de anchura de variación de par
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2005/006474.
Solicitante: MITSUBISHI DENKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 7-3, MARUNOUCHI 2-CHOME CHIYODA-KU TOKYO 100-8310 JAPON.
Inventor/es: MARUYAMA, TAKAFUMI, NEGORO,Hideto.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60L15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 15/00 Métodos, circuitos o dispositivos para controlar la velocidad de los motores de tracción de vehículos propulsados eléctricamente, p.ej. la velocidad de los motores de tracción, para realizar rendimientos deseados,; Adaptación sobre el vehículo propulsado eléctricamente de la instalación de control a distancia a partir de un lugar fijo, a partir bien de diferentes puntos del vehículo, bien de diferentes vehículos de un mismo tren. › caracterizados por la forma de la corriente utilizada en el circuito de control.
- G01R31/02
- H02P21/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo.
- H02P5/46 H02P […] › H02P 5/00 Disposiciones especialmente adaptadas para la regulación o el control de la velocidad o del par de dos o más motores eléctricos (H02P 6/04, H02P 8/40 tienen prioridad). › para la regulación de velocidad de dos o más motores dinamoeléctricos, en relación a otro.
PDF original: ES-2394967_T3.pdf
Fragmento de la descripción:
Dispositivo de control de coche eléctrico.
Campo técnico. La presente invención se refiere a un dispositivo de control de un vehículo eléctrico, y más particularmente, a un dispositivo de control de vehículo eléctrico que tiene una función de detectar la desconexión de un cable de motor que suministra una energía en corriente alterna a un motor de inducción desde un dispositivo inversor.
Antecedentes de la técnica anterior. Un sistema de detección de fase abierta de un dispositivo convencional de control de vehículo obtiene los valores medios Iu, lv, y lw de las respectivas intensidades de corriente de fase de una intensidad en corriente alterna trifásica que se descarga como salida mediante el dispositivo inversor, halla los valores Io = Iu + Iv+ Iw) /3 que resultan de un promedio adicional de los valores medios de estas respectivas intensidades de corriente de fase, y detecta una fase abierta cuando las diferencias [Iu – Io], [Iv-Io], y [Iw-Io] entre los valores medios de las respectivas intensidades de corriente de fase y el valor promediado adicional exceden de un valor de referencia.
Documento de patente 1: JP 06-245301 A
Documento de patente 2: JP 2005006369
Documento de patente 3: JP 20044274845
Documento de patente 4: JP 56166797
Documento de patente 5: JP06311783
Exposición de la Invención.
Problemas a solucionar por la Invención. En el dispositivo de control convencional de un vehículo eléctrico anteriormente mencionado, en el caso de un sistema en el que una pluralidad de, por ejemplo, cuatro motores de inducción estén conectados en paralelo entre sí y accionados por un dispositivo inversor con control vectorial, se plantea un problema tal que no se puede detectar un estado en el que solamente una fase de un motor de inducción entre los cuatro motores de inducción esté desconectada.. Esto se debe a que una intensidad de corriente del motor de inducción se controla a una alta velocidad por el control vectorial, con el resultado de que las respectivas intensidades medias de corriente de fase de los cuatro motores de inducción no varían incluso si una fase de un motor de inducción está desconectada, y por tanto las diferencias [Iu –Io], [Iv – Io], e [Iw –Io] no exceden del valor de referencia.
La presente invención se ha realizado para solucionar el problema anteriormente indicado, y por tanto un objeto de la presente invención es proveer un dispositivo de control de vehículo eléctrico que es capaz de detectar incluso un estado en el que solamente una fase de un motor de inducción esté desconectada en un sistema en donde una pluralidad de motores de inducción estén conectados en paralelo entre sí y accionados por un dispositivo inversor de control vectorial.
Medios para solucionar los problemas. La presente invención, según se ha especificado en la reivindicación 1, provee un dispositivo de control de vehículo eléctrico que controla vectorialmente a un motor de inducción mediante un dispositivo inversor, cuyo dispositivo de control de vehículo eléctrico incluye: una unidad de control vectorial para calcular la intensidad de corriente I1q en el eje q, una intensidad de corriente I1d en el eje d, una orden de tensión E1qr en el eje q, una orden de tensión E1dr en el eje d, y una frecuencia angular ωinv de inversor del motor de inducción , una unidad de cálculo de par para calcular el par del motor de inducción basándose en la intensidad de corriente I1q en el eje q, en la intensidad de corriente de I1d en el eje d, EGB, en la orden de tensión E1qr en el eje q, en la orden de tensión E1dr en el eje d, y en la frecuencia angular ωinv de inversor; una unidad de cálculo de anchura de la variación de par para calcular la anchura de la variación de par a partir de un valor máximo y un valor mínimo de resultado de cálculo de par en una anchura de tiempo predeterminada basándose en el resultado del cálculo de par que es calculado por la unidad de cálculo de par; y un comparador para comparar la anchura de variación de par que es calculada por la unidad de cálculo de anchura variación de par con un valor de referencia predeterminado de variación de par para entregar como salida una señal de detección de desconexión cuando la anchura de variación de par exceda del valor de referencia de la anchura de variación de par.
Efecto de laInvención. Según la presente invención, se presta atención al hecho de que el par del motor de inducción se calcula basándose en la intensidad de corriente I1q en el eje q, intensidad de corriente I1d en el eje d, orden de tensión E1qr en el eje q, orden de tensión E1dr en el eje d, y frecuencia angular ωinv de inversor, que se obtienen mediante la unidad de control vectorial, y el resultado del cálculo de par varía cuando solamente una fase del motor de inducción esté desconectada en un sistema en el que una pluralidad de motores de inducción están conectados en paralelo entre sí y accionados por un dispositivo de inversor de control vectorial, y una anchura de variación de par y un valor de referencia de variación de par se comparan entre sí para detectar la desconexión. Como resultado, se puede
detectar el estado en el que solamente una fase de un motor de inducción esté desconectada en el sistema en donde una pluralidad de motores de inducción están conectados en paralelo entre sí y accionados por un dispositivo inversor con control vectorial.
Breve descripción de los dibujos La figura 1 es un esquema estructural que muestra un dispositivo de control de vehículo eléctrico según una primera realización de la presente invención.
La figura 2 es un diagrama explicativo que muestra las formas de onda de las respectivas intensidades de corriente de fase y resultados del cálculo de par en el dispositivo de control de vehículo eléctrico en un estado normal según la primera realización de la presente invención.
La figura 3 muestra las formas de onda de la respectiva intensidad de corriente de fase y resultados de los cálculos de par en un estado en el que una fase W de un motor de inducción está desconectada en el
dispositivo de control de motor eléctrico según la primera realización de la presente invención.
La figura 4 es un diagrama explicativo que muestra un estado en el que una fase W de un motor de inducción está desconectada en el dispositivo de control de vehículo eléctrico según la primera realización de la presente invención.
Modo óptimo para llevar a cabo la Invención.
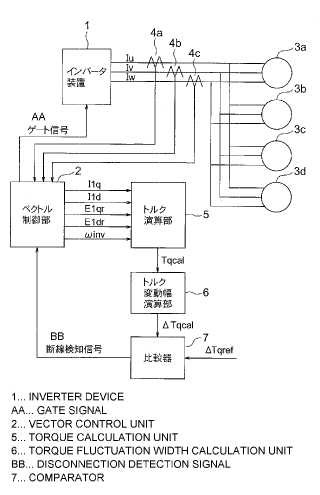
Primera realización. La figura 1 muestra un dispositivo de control de vehículo eléctrico según una primera realización de la presente invención. Como se muestra en la figura 1, un dispositivo inversor 1 está conectado con cuatro motores de inducción 3 a, 3b, 3c y 3d. Estos cuatro motores de inducción 3 a, 3b, 3c y 3d están conectados en paralelo con el dispositivo inversor 1, y controlados vectorialmente por el dispositivo inversor 1. El dispositivo inversor 1 está conectado con una unidad de control vectorial 2, y el dispositivo inversor 1 conmuta sobre un elemento de conmutación (no mostrado) que está instalado en el interior del dispositivo inversor 1 de acuerdo con una señal de puerta que es descargada como salida desde la unidad de control vectorial 2, para de ese modo suministrar una energía eléctrica a los cuatro motores de inducción 3 a, 3b, 3c y 3d que están conectados en paralelo con el dispositivo inversor 1. Las respectivas intensidades de corriente Iu, Iv e Iw de fase que se descargan como salida desde el dispositivo inversor 1 son detectadas por los detectores CT 4 a, 4b, y 4c de intensidad de corriente de fase, y luego se introducen como entrada a la unidad de control vectorial 2. Una intensidad de corriente I1q de eje q, una intensidad de corriente I1d de eje d, una orden de tensión E1qr de eje q, una orden de tensión E1dr de eje d, y una frecuencia angular ωinv de inversor del motor de inducción, . que se obtienen en un proceso de un cálculo de control vectorial que se implementa mediante la unidad de control vectorial 2, se introducen como entrada a una unidad 5 de cálculo de par desde la unidad de control vectorial 2. Un resultado Tqcal de cálculo de par se calcula en la unidad 5 de cálculo de par basándose en dichos valores introducidos como entrada. El resultado Tqcal de cálculo de par que se ha calculado por la unidad 5 de cálculo de par se introduce como entrada a una unidad 6 de cálculo de anchura de variación de par. Una anchura ΔTqcal de variación de par que se ha calculado en la unidad 6 de cálculo de anchura de variación de par se introduce como entrada a un comparador 7. En el comparador 7, un valor de referencia... [Seguir leyendo]
Reivindicaciones:
1.Un dispositivo de control de vehículo eléctrico, que controla vectorialmente un motor de inducción (3 a, 3b, 3c y 3d) 5 mediante un dispositivo inversor (1) , cuyo dispositivo de control de vehículo eléctrico comprende:
una unidad de control vectorial (2) para calcular una intensidad de corriente I1q en el eje q, una intensidad de corriente I1d en el eje d, una orden de tensión E1qr en el eje q, una orden de tensión E1dr en el eje d, y una frecuencia angular ωinv de inversor del motor de inducción (3 a, 3b, 3c, 3d) ; y.
una unidad de cálculo de par (5) para calcular el par del motor de inducción (3 a, 3b, 3c, 3d) basándose en la intensidad de corriente I1q en el eje q, intensidad de corriente I1d en el eje d, orden de tensión E1qr en el eje q, orden de tensión E1dr en el eje d, y en la frecuencia angular ωinv de inversor; caracterizado porque comprende. una unidad (6) de cálculo de la anchura de variación de par para calcular la anchura de variación ΔTqcal =
Tqmax- Tqmin a partir de un valor máximo Tqmax y de un valor mínimo Tqmin de un resultado del cálculo de par en una anchura de tiempo predeterminada (Tw, Tw1, Tw2. Tw3) basándose en el resultado del cálculo de par que se calcula mediante de la unidad (5) de cálculo del par; y un comparador (7) para comparar la anchura de variación de par que se calcula mediante la unidad (6) de cálculo de anchura de variación de par con un valor de referencia predeterminado ΔTqref de anchura de variación de par para entregar como salida una señal de detección de desconexión cuando la anchura de variación de par excede al valor de referencia ΔTqref.de anchura de variación de par.
2. Un dispositivo de control de vehículo eléctrico según la reivindicación 1, en donde la anchura de tiempo predeterminada en la unidad (6) de cálculo de anchura de la variación de par se configura para que sea la mitad o25 más , de un ciclo de una intensidad de corriente de fase.
3. Un dispositivo de control de vehículo eléctrico según la reivindicación 1 o la reivindicación 2, en donde la unidad
(5) de cálculo de par calcula los flujos magnéticos primarios en el eje d y en el eje q y las corrientes secundarias en el eje d y en el eje q del motor de inducción (3 a, 3b, 3c, 3d) basándose en la intensidad de corriente I1q del eje q,
la intensidad de corriente I1d del eje d, la orden de tensión E1qr en el eje q, la orden de tensión E1dr en el eje q, y la frecuencia angular ωinv de inversor para calcular el par a partir de los flujos magnéticos primarios en el eje d y en el eje q y de las intensidades de corriente secundarias en el eje d y en el eje q.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA AISLAR EL TRAMO AVERIADO UTILIZANDO MEDIDOR DE RIGIDEZ DIELÉCTRICA ADAPTADO, EN REDES DE DISTRIBUCIÓN DE 3ª CATEGORÍA, del 28 de Mayo de 2020, de FERNANDEZ DE HEREDIA ESCOLANO, David: El procedimiento para aislar el tramo averiado en líneas eléctricas de 3ª Categoría, consiste en la utilización de un medidor de rigidez dieléctrica adaptado, en dos […]
Dispositivo y procedimiento para el diagnóstico de objetos de medición usando una tensión de medición, del 8 de Abril de 2020, de b2 electronics GmbH: Dispositivo para el diagnóstico de objetos de medición usando una tensión de medición que actúa sobre el respectivo objeto de medición (2, […]
Método y dispositivo para el ensayo de un transformador, del 7 de Agosto de 2019, de OMICRON ELECTRONICS GMBH: Método de ensayo de un transformador de tensión que comprende las etapas de a) emular el transformador de tensión mediante […]
Identificación de cables eléctricos defectuosos, del 26 de Junio de 2019, de Biosense Webster (Israel), Ltd: Un método que comprende: acoplar un cable eléctrico , que comprende múltiples cables, a un circuito que comprende un banco de resistencias al acoplar los primeros […]
Dispositivo de diagnóstico de estado de señal para controlar accionador como miembro accionado, del 17 de Mayo de 2019, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un dispositivo para diagnosticar estado de señal de un objeto accionado, en el que se introduce una señal de tensión de accionamiento para accionar […]
PROCEDIMIENTO Y SISTEMA DE MEDICIÓN DE FALTA DE SIMETRÍA EN MOTORES DE INDUCCIÓN TRIFÁSICOS, del 10 de Mayo de 2019, de UNIVERSITAT POLITECNICA DE VALENCIA: Procedimiento y sistema de medición de falta de simetría en motores de inducción trifásicos. La invención se refiere a un procedimiento […]
Procedimiento y dispositivo de detección de un arco eléctrico, del 9 de Mayo de 2019, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de detección de un arco eléctrico en una instalación eléctrica que suministra una señal eléctrica, comprendiendo las siguientes […]
Método y dispositivo de detección de corriente de fuga, del 8 de Mayo de 2019, de HUAWEI TECHNOLOGIES CO., LTD.: Un método de detección de corriente de fuga, aplicado a la detección de corriente de fuga, para un componente montado en placa, en una placa PCBA, en donde el método comprende: […]