Dispositivo que comprende una cámara de aire acondicionado con un robot.
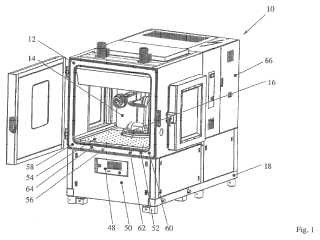
Dispositivo (10), que comprende un armario de aire acondicionado (12) con un espacio interior (14) delimitadopor un fondo aislante (52),
cuya temperatura es regulable por medio de un primer equipo, y una instalación demanipulación (16) dispuesta en el espacio interior, cuya temperatura puede ser regulada por medio de un segundoequipo, caracterizado porque el dispositivo (10) comprende un bastidor de transporte (18) que recibe tanto el armariode aire acondicionado (12) como también el primero y el segundo equipo, con respecto a cuyo bastidor esdesplazable un chasis (20) que recibe la instalación de manipulación (16) y que está desacoplado del bastidordurante la utilización del armario de aire acondicionado y está conectado con el bastidor para la formación de unaunidad durante un transporte del dispositivo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11182308.
Solicitante: WEISS UMWELTTECHNIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Greizer Strasse 41-49 35447 Reiskirchen ALEMANIA.
Inventor/es: BATTENBERG,GÜNTHER, KLEE,GERALD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J19/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
- B25J21/00 B25J […] › Recintos con dispositivos de manipulación integrados (características de estructura del montaje de un manipulador sobre la pared B25J 1/08).
PDF original: ES-2400023_T3.pdf
Fragmento de la descripción:
Dispositivo que comprende una cámara de aire acondicionado con un robot
La invención se refiere a un dispositivo que comprende una cámara de aire acondicionado con un espacio interior delimitado por un fondo aislante, cuya temperatura es regulable por medio de un primer equipo, y con una instalación de manipulación dispuesta en el espacio interior, que es regulable en la temperatura por medio de un segundo equipo.
Un dispositivo correspondiente se puede deducir a partir del documento DE-A-100 13 721. Para la regulación de la temperatura de un robot como instalación de manipulación, éste está rodeado por una envoltura doble, a cuyo espacio interior se puede alimentar aire atemperado. Un dispositivo de calefacción y de refrigeración para la regulación de la temperatura deseada es posicionado separado de la cámara de climatización y presenta unacarcasa desplazable. Ésta está conectada a través de conductos con el robot o bien con su envoltura y a tal fin atraviesa paredes laterales correspondientes de la cámara de climatización.
Se conoce a partir del documento DE-B-103 06 559 un dispositivo de climatización de un robot, que presenta una envoltura que rodea el robot. Ésta está conectada a través de conexiones con un módulo de aire acondicionado desplazable.
Un inconveniente de los dispositivos conocidos es que el equipo, con el que se atempera la instalación de manipulación, se instala separado del armario de aire acondicionado, de manera que durante el transporte solamente es necesario un aflojamiento de las mangueras de conexión, para transportar el armario de aire acondicionado y de forma separada el equipo para el robot. Esto es un inconveniente especialmente cuando un armario de aire acondicionado debe emplearse con frecuencia en diferentes lugares.
El documento DE-A-35 32 305 se refiere a una célula de fabricación y de montaje para piezas de trabajo y presenta un puesto de trabajo de robot industrial. Para posibilitar un transporte, la célula de montaje está configurada como contenedor de transporte.
Objeto del documento DE-A-195 44 240 son un procedimiento y un dispositivo para la determinación de las coordenadas espaciales de puntos de objetos y un procedimiento para la fabricación de una carrocería. El dispositivo, que sirve especialmente para la verificación de la estabilidad dimensional de objetos grandes como carrocerías de automóviles, puede comprender una cámara de climatización así como un robot de medición.
Una célula de robot se conoce a partir del documento DE-A-10 2008 055 677. Ésta comprende un bastidor de base, en el que está dispuesto un robot. En el bastidor de base se pueden acoplar diferentes insertos.
Un armario de aire acondicionado con instalación de manipulación integrada se conoce a partir del documento CHA-690 962.
El documento JP-A-0 254076 se refiere a un robot, que está rodeado por una envoltura, para posibilitar una temperatura.
Objeto del documento EP-A-1 693 149 es un dispositivo de mecanización, que comprende un bastidor con un módulo de cambio que se puede insertar en un espacio libre y que presenta un alojamiento de la pieza de trabajo así como una herramienta de procesamiento.
Una célula de soldadura configurada como cabina transportable con robot se conoce a partir del documento A20006/108342.
El documento WO-A-2007/120438 se refiere a una célula de trabajo constituida de forma modular con robot.
La presente invención tiene el cometido de desarrollar un dispositivo del tipo mencionado al principio, que proporciona una simplificación del transporte.
También de acuerdo con un aspecto, debe existir la posibilidad de que la instalación de manipulación se puede mantener o bien verificar sin mucho gasto también fuera del armario de aire acondicionado.
De acuerdo con otro aspecto de la invención, debe asegurarse que no se transmitan oscilaciones desde el armario de aire acondicionado sobre el rotor o al menos no se transmiten en una medida esencial.
Para la solución de al menos uno de los aspectos, la invención prevé esencialmente que el dispositivo comprenda un bastidor que recibe tanto la cámara de aire acondicionado como también el primero y el segundo equipos, con relación a cuyo bastidor es desplazable un chasis que presenta la instalación de manipulación, que está desacoplado durante la instalación del armario de aire acondicionado del bastidor y está conectado durante el transporte del dispositivo con el bastidor para la formación de una unidad.
El primero y el segundo equipos comprenden también la posibilidad de que éstos sean sustituidos por un único equipo, de manera que, como consecuencia de ello, solamente se necesita un compresor con dos lugares de refrigeración. Estando destinado un lugar de refrigeración para el robot y el otro lugar de refrigeración para el espacio interior de la cámara de aire acondicionado. A este respecto, a continuación la característica del primero y del segundo equipos se puede entender también como sinónimo de un único equipo.
A diferencia de los dispositivos conocidos anteriormente, el armario de aire acondicionado y el equipo que lo climatiza así como el equipo que climatiza la instalación de manipulación como robot forman una unidad, de manera que es posible un transporte sin problemas, sin que sea necesario un aflojamiento de las conexiones. Puesto que la instalación de manipulación se puede desacoplar del bastidor, resulta la ventaja de que durante las mediciones no se pueden transmitir vibraciones desde el bastidor sobre la instalación de manipulación o no se transmiten en una medida esencial.
El chasis propiamente dicho es regulable con relación al bastidor, de manera que con ello existe la posibilidad de que el chasis con la instalación de manipulación se pueda retirar fuera del armario de aire acondicionado, es decir, su espacio interior a través del desplazamiento del chasis, de manera que se puede realizar, por ejemplo, un mantenimiento sin problemas, sin que sea necesaria una intervención en el espacio interior del armario de aire acondicionado propiamente dicho.
La unión del chasis y el bastidor, que se lleva a cabo para la formación de una unidad, asegura que se pueda realizar un transporte sin problemas, sin que deban aflojarse mangueras u otras conexiones, que son necesarias para la climatización de la instalación de manipulación.
En un desarrollo de la invención está previsto que la instalación de manipulación comprenda un zócalo giratorio, que es recibido por un alojamiento, que atraviesa el fondo de aislamiento o se extiende con su borde superior alineado con el fondo de aislamiento. De esta manera – y de la misma forma a diferencia del estado de la técnica conocido anteriormente – existe la posibilidad de que solamente una medida reducida del alojamiento se encuentre dentro del espacio interior del armario de aire acondicionado, de modo que se evitan falsificaciones de la temperatura o bien se simplifican las regulaciones de la temperatura.
En particular, está previsto que el fondo de aislamiento presente una sección distanciable, que se extiende en la dirección de regulación del alojamiento, de una anchura que es al menos igual a la anchura del alojamiento transversalmente a la dirección de regulación. En este caso, la sección distanciable está conectada especialmente sobre guías con zonas o bien secciones remanentes del fondo aislante. A tal fin, los bordes de las secciones se pueden solapar t presentan aproximadamente una geometría en forma de Z.
El alojamiento está obturado frente al fondo aislante. A tal fin, está previsto especialmente que, durante el posicionamiento del alojamiento en el espacio interior del armario de aire acondicionado, el alojamiento sea rodeado con intersticio por el fondo aislante. El intersticio es rellenado a continuación por una junta de obturación con preferencia de varias partes.
Es evidente que existe también la posibilidad de que se realice un apoyo de obturación del fondo aislante en la superficie circunferencial del alojamiento. A tal fin, pueden estar previstas juntas de obturación adicionales.
Independientemente de ello se propone que el alojamiento esté obturado con respecto al fondo de aislamiento, de tal manera que no se transmiten desde el primero vibraciones sobre el alojamiento y, por lo tanto, sobre el robot, es decir, la instalación de manipulación o no se transmiten en una medida esencial.
Las medidas constructivas de acuerdo con la invención posibilitan una extracción sencilla de la instalación de manipulación fuera del espacio interior del armario de aire acondicionado a través de la regulación del chasis con respecto... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo (10) , que comprende un armario de aire acondicionado (12) con un espacio interior (14) delimitado por un fondo aislante (52) , cuya temperatura es regulable por medio de un primer equipo, y una instalación de manipulación (16) dispuesta en el espacio interior, cuya temperatura puede ser regulada por medio de un segundo equipo, caracterizado porque el dispositivo (10) comprende un bastidor de transporte (18) que recibe tanto el armario de aire acondicionado (12) como también el primero y el segundo equipo, con respecto a cuyo bastidor es desplazable un chasis (20) que recibe la instalación de manipulación (16) y que está desacoplado del bastidor durante la utilización del armario de aire acondicionado y está conectado con el bastidor para la formación de una unidad durante un transporte del dispositivo.
2. Dispositivo de acuerdo con la reivindicación 1, en el que la instalación de manipulación (16) presenta un zócalo giratorio (42) , que parte desde un alojamiento (40) , caracterizado porque el fondo de aislamiento (52) presenta una escotadura que corresponde a la geometría de la periferia del alojamiento (40) , extendiéndose el alojamiento con su borde superior enrasado al fondo aislante o en el lado del espacio interior por encima del fondo aislante.
3. Dispositivo de acuerdo con la reivindicación 2, caracterizado porque el fondo aislante (52) presenta una sección (56) distanciable, que se puede retirar en la dirección de regulación del alojamiento (40) , de una anchura que es al menos igual a la anchura del alojamiento (40) transversalmente a la dirección de regulación.
4. Dispositivo de acuerdo con la reivindicación 3, caracterizado porque la sección (56) distanciable del fondo aislante (52) está conectada a través de guías (62, 64) con secciones (58, 60) restantes del fondo aislante (52) .
5. Dispositivo de acuerdo con al menos una de las reivindicaciones anteriores, caracterizado porque desde el chasis (20) parte al menos una masa adicional (44, 46) .
6. Dispositivo de acuerdo con al menos una de las reivindicaciones anteriores, caracterizado porque el primero y el segundo equipo están configurados como un equipo.
7. Dispositivo de acuerdo con la reivindicación 2, caracterizado porque el segundo equipo o el equipo, que forma el primero y el segundo equipo, están conectados a través de un conducto y un conducto de salida de aire con conexiones (80, 82) que parten desde el alojamiento, las cuales están conectadas, por su parte, con el espacio intermedio entre la instalación de manipulación (16) y una envoltura que la rodea o con el espacio intermedio de envolturas que rodean la instalación de manipulación.
8. Dispositivo de acuerdo con la reivindicación 7, caracterizado porque los conductos de entrada y de salida de aire están conectados a través de conexiones de enchufe con las conexiones (80, 82) .
9. Dispositivo de acuerdo con la reivindicación 2, caracterizado porque cuando la instalación de manipulación (16) está dispuesta correctamente en el espacio interior (14) , entre su alojamiento (40) y el fondo aislante (52) se extiende un intersticio, que está cerrado por una junta de obturación con preferencia de varias partes.
10. Dispositivo de acuerdo con al menos una de las reivindicaciones anteriores, caracterizado porque el chasis (20) presenta un bastidor de fondo (71) con patas.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]