Disposición y procedimiento de monitorización cruzada de datos de sensores.
Disposición para la monitorización cruzada de dos señales independientes generadas mediante sensores (s1 (t),
s2 (t) ), que comprende:
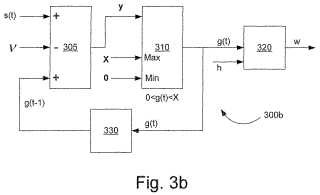
medios (100; 305; 730) para el cálculo de un valor (y (t) ) que depende de un valor de señal (s (t) ), un valor de deriva (v), en el que el valor de deriva (v) es un valor de parámetro de diseño predeterminado, y un valor de retroalimentación (g (t-1) );
medios (100; 309; 310) para la determinación de uno mayor (g (t) ) del valor calculado (y (t) ) y un primer valor predeterminado (P);
medios (100; 320) para comparar dicha valor mayor determinado (g (t) ) con un segundo valor predeterminado (h);
medios (100; 330) para retrasar dicho valor mayor determinado (g (t) ) y cambiar el estado de dicho valor mayor (g (t) ) para convertirse en un valor de retroalimentación actualizado (g (t-1) ) para proporcionarse a los medios para calcular el valor (y (t) );
caracterizada porque el valor de la señal s (t) comprende información sobre un valor absoluto de una diferencia entre las dos señales independientes generadas (s1 (t), s2 (t) ) y porque los medios (100; 320) para comparar dicho valor mayor determinado (g (t) ) con un segundo valor predeterminado (h) están dispuestos para emitir una señal de aviso (w) si dicho valor mayor determinado (g (t) ) es igual o mayor que el segundo valor predeterminado (h) para indicar que las señales independientes (s1 (t), s2 (t) ) difieren demasiado entre sí respecto al segundo valor predeterminado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07104282.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: Gustafsson,Anna.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B9/03 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 9/00 Disposiciones de seguridad (G05B 7/00 tiene prioridad; disposiciones de seguridad en sistemas de control por programa G05B 19/048, G05B 19/406; válvulas de seguridad F16K 17/00; circuitos de protección de seguridad en general H02H). › con un bucle de canal múltiple, es decir, sistemas de control redundantes.
PDF original: ES-2383912_T3.pdf
Fragmento de la descripción:
Disposición y procedimiento de monitorización cruzada de datos de sensores
Campo técnico
La invención se refiere en general a monitorización cruzada de datos. En particular, la invención se refiere a una disposición para la monitorización cruzada de datos proporcionados dentro de una plataforma.
La invención también se refiere a un procedimiento para la monitorización cruzada de datos. En particular, la invención se refiere a un procedimiento para la monitorización cruzada de datos proporcionados dentro de una plataforma. Además, la invención se refiere a un software adaptado para realizar las etapas del procedimiento de monitorización cruzada de datos, cuando se ejecuta en un ordenador.
Antecedentes de la invención
Hoy en día es de suma importancia presentar correctamente los datos primarios críticos de seguridad de vuelo, tales como la altura o el ángulo de balanceo, a un operador de una plataforma, por ejemplo, un piloto de una aeronave. En las aeronaves a menudo hay al menos dos sistemas independientes previstos para la generación de datos críticos primarios de seguridad de vuelo. Los datos generados por los dos sistemas independientes tienen que ser revisados para detectar cualquier mal funcionamiento de los sensores del sistema respectivo que resultan en datos críticos primarios de seguridad de vuelo falsos o desviados.
La monitorización cruzada manual de datos primarios críticos de vuelo realizada por el operador de la plataforma implica una carga de trabajo alta. Además, un operador estresado o cansado puede hacer juicios incorrectos más a menudo. En los aviones, por ejemplo, los datos primarios críticos de seguridad de vuelo para realizar la monitorización cruzada se presentan en superficies de visualización diferentes en la cabina, ocupando un área de superficie de presentación innecesaria.
Otra forma de controlar datos importantes generados por distintas fuentes independientes es votar. El procedimiento de votación automática se refiere a un sistema de fuentes redundantes triples, lo que significa que tres fuentes independientes se utilizan por separado, generando cada una datos únicos a comparar. De acuerdo con un procedimiento conocido, los datos entre los tres, el que se desvía más, se descarta. Este sistema es voluminoso, pesado y costoso.
La patente US nº. 4.622.667 muestra un sistema de control de vuelo automático que es no operativo respecto a un fallo genérico. El sistema de control de vuelo automático utiliza al menos dos subsistemas independientes de control de vuelo, comprendiendo cada uno un par de canales. Un canal en cada subsistema incluye un primer procesador de datos digitales y el otro canal incluye un segundo procesador de datos digitales con un tercer procesador activo. Los dos canales en cada subsistema son monitorizados a través de un canal cruzado para detectar discrepancias entre las salidas del primer y del segundo procesador y las salidas del primer y del tercer procesador. Este sistema también adolece de la desventaja de ser voluminoso y costoso.
Por lo tanto, existe una necesidad de proporcionar medios dispuestos para facilitar el proceso de monitorización cruzada de datos de los parámetros primarios de vuelo dentro de una plataforma, tal como un avión.
Sumario de la invención
Un objeto de acuerdo con un aspecto de la presente invención es proporcionar una disposición y un procedimiento mejorados para la monitorización cruzada de datos.
Un objeto de acuerdo con un aspecto de la presente invención es proporcionar una disposición y procedimiento que reduce la falsa detección de sensores erróneos de una plataforma.
Los problemas mencionados anteriormente se resuelven mediante una disposición para la monitorización cruzada de dos señales independientes, que comprende:
medios para calcular un valor dependiendo de un valor de señal, un valor de deriva y un valor de retroalimentación;
medios para determinar uno mayor del valor calculado y un primer valor predeterminado;
medios para comparar dicho valor mayor determinado con un segundo valor predeterminado;
medios para retrasar dicho valor mayor determinado y cambiar el estado de dicho valor mayor para convertirse en un valor de retroalimentación actualizado para proporcionarse a los medios para calcular el valor. La disposición se caracteriza porque el valor de señal comprende información sobre un valor absoluto de una diferencia entre las dos señales generadas independientes.
Preferiblemente, los medios para comparar dicho valor mayor determinado con un segundo valor predeterminado se disponen para emitir una señal de advertencia si dicho valor mayor determinado es igual o mayor que el segundo valor predeterminado.
Preferiblemente, los medios para determinar un valor mayor del calculado y el primer valor predeterminado también se disponen para limitar el valor mayor determinado del valor calculado y el primer valor predeterminado a un valor predeterminado.
Preferiblemente, los medios para seleccionar una fase de bucle, el valor de retroalimentación actualizado se dispone para recibir el valor de retroalimentación actualizado desde los medios de retraso y para recibir el valor mayor determinado de los medios determinantes.
Preferiblemente, el segundo valor predeterminado es dependiente de un tiempo constante prefijado, la frecuencia constante prefijada, y una diferencia de un valor de parámetro y el valor de deriva.
Preferiblemente, el segundo valor predeterminado es un valor umbral cuyo valor está en función de los diferentes modos de plataforma, tales como modo de arranque o modo de aterrizaje.
Preferiblemente, el valor de deriva es un valor de parámetro de diseño predeterminado.
Preferiblemente, los medios para calcular el valor absoluto de la diferencia entre las dos señales independientes se disponen para introducir el valor absoluto calculado a los medios para calcular el valor.
Preferentemente, cada una de las dos señales independientes es generada por un sensor independiente separado.
Preferiblemente, dichas primera y segunda señales comprenden sustancialmente los valores medidos de forma simultánea relativos a un parámetro de funcionamiento.
Preferiblemente, el parámetro de funcionamiento se elige entre un grupo que comprende altitud (A) de una plataforma, velocidad del aire calibrada (CV) de una plataforma, velocidad (MS) de una plataforma medida en Mach, valor de paso TV de una (plataforma) , valor de rollo (RV) de una plataforma, rumbo verdadero (TH) de una plataforma y curso magnético (MC) de una plataforma.
De acuerdo con un aspecto de la invención una plataforma que comprende de una disposición como se ha representado anteriormente, en la que la plataforma se elige entre un grupo que comprende un avión, una nave espacial, un satélite, un helicóptero, un robot, un vehículo de misiles o de tierra, una embarcación o una nave subacuática, por ejemplo un automóvil, un buque o un submarino.
Los problemas también se resuelven mediante un procedimiento para monitorizar de forma cruzada dos señales independientes dentro de una plataforma, que comprende las etapas de:
- calcular un valor dependiendo de un valor de señal, valor de deriva y un valor de retroalimentación;
- determinar un valor mayor del calculado y un primer valor predeterminado;
- comparar dicho valor mayor determinado con un segundo valor predeterminado;
- demorar dicho valor mayor determinado y cambiar el estado de dicho valor mayor para convertirse en un valor de retroalimentación actualizado para ser utilizado es una siguiente etapa de cálculo del valor, en el que el procedimiento también comprende la etapa de:
- calcular el valor de la señal dependiendo de un valor absoluto de la diferencia entre las dos señales independientes.
Preferiblemente, se proporciona un programa informático que comprende un código de programa para realizar las etapas del procedimiento representadas anteriormente, cuando dicho programa informático se ejecuta en un ordenador.
Preferiblemente, se proporciona un producto del programa informático que comprende un código de programa almacenado en un soporte legible por ordenador para la realización de las etapas del procedimiento descritas anteriormente, cuando dicho programa informático que se ejecuta en el ordenador.
Preferiblemente,... [Seguir leyendo]
Reivindicaciones:
1. Disposición para la monitorización cruzada de dos señales independientes generadas mediante sensores (s1 (t) , s2 (t) ) , que comprende:
medios (100; 305; 730) para el cálculo de un valor (y (t) ) que depende de un valor de señal (s (t) ) , un valor de deriva (v) , en el que el valor de deriva (v) es un valor de parámetro de diseño predeterminado, y un valor de retroalimentación (g (t-1) ) ;
medios (100; 309; 310) para la determinación de uno mayor (g (t) ) del valor calculado (y (t) ) y un primer valor predeterminado (P) ;
medios (100; 320) para comparar dicha valor mayor determinado (g (t) ) con un segundo valor predeterminado (h) ;
medios (100; 330) para retrasar dicho valor mayor determinado (g (t) ) y cambiar el estado de dicho valor mayor (g (t) ) para convertirse en un valor de retroalimentación actualizado (g (t-1) ) para proporcionarse a los medios para calcular el valor (y (t) ) ;
caracterizada porque el valor de la señal s (t) comprende información sobre un valor absoluto de una diferencia entre las dos señales independientes generadas (s1 (t) , s2 (t) ) y porque los medios (100; 320) para comparar dicho valor mayor determinado (g (t) ) con un segundo valor predeterminado (h) están dispuestos para emitir una señal de aviso (w) si dicho valor mayor determinado (g (t) ) es igual o mayor que el segundo valor predeterminado (h) para indicar que las señales independientes (s1 (t) , s2 (t) ) difieren demasiado entre sí respecto al segundo valor predeterminado.
2. Disposición según la reivindicación 1, caracterizada porque
los medios (100; 309; 310) para determinar un mayor del valor calculado (y (t) ) y el primer valor predeterminado (P) también están dispuestos para limitar el valor mayor determinado (y (t) , P) del valor calculado (y (t) ) y el primer valor predeterminado (P) a un valor predeterminado (X) .
3. Disposición según cualquiera de las reivindicaciones 1 a 2, caracterizada porque
medios (100; 311) para la selección de una fase de bucle del valor de retroalimentación actualizado (g (t-1) ) están dispuestos para recibir el valor actualizado de retroalimentación (g (t-1) ) de los medios de retardo (100; 330) y para recibir el valor mayor determinado (g (t) ) de los medios de determinación (100; 309; 310) .
4. Disposición según cualquiera de las reivindicaciones 1 a 3, caracterizada porque
el segundo valor predeterminado (h) depende de un tiempo constante predeterminado (t) , una frecuencia constante predeterminada (f) , y una diferencia de un valor de parámetro (I) y un valor de deriva (v) .
5. Disposición según cualquiera de las reivindicaciones 1 a 4, caracterizada porque
el segundo valor predeterminado es un valor umbral (h) , cuyo valor depende de modos de plataforma diferentes, tal como modo de inicio o modo de aterrizaje.
6. Disposición según cualquiera de las reivindicaciones 1 a 5, caracterizada porque
medios para calcular el valor absoluto de la diferencia entre las señales independientes (s1 (t) , s2 (t) ) están dispuestos para introducir el valor absoluto calculado a los medios (100; 305) para calcular el valor (y (t) ) .
7. Disposición según cualquiera de las reivindicaciones 1 a 6, caracterizada porque
cada una de las dos señales independientes (s1 (t) , s2 (t) ) se genera mediante un sensor separado independiente (110, 120) .
8. Disposición según cualquiera de las reivindicaciones 1 a 7, caracterizada porque
dicha primera y segunda señales (s1 (t) , s2 (t) ) comprende valores medidos de forma sustancialmente simultánea relativos a un parámetro de funcionamiento.
9. Disposición según la reivindicación 8, caracterizada porque
el parámetro de funcionamiento se elige entre un grupo que comprende la altitud (A) de una plataforma, la velocidad del aire calibrada (CV) de una plataforma, la velocidad (MS) de una plataforma medida en Mach, el valor de paso TV de una (plataforma) , el valor de rollo (RV) de una plataforma, el rumbo verdadero (TH) de una plataforma y el curso magnético (MC) de una plataforma.
10. Plataforma que comprende una disposición según cualquiera de las reivindicaciones 1 a 9, caracterizada porque la plataforma se elige entre un grupo que comprende un avión, una nave espacial, un satélite, un helicóptero, un robot, un vehículo de misiles o de tierra, una embarcación o una nave bajo el agua, por ejemplo, un automóvil, un barco o un submarino.
11. Procedimiento para la monitorización cruzada de dos señales independientes generadas mediante sensores (s1 (t) , s2 (t) ) en una plataforma, que comprende las etapas de:
- calcular un valor (y (t) ) en función de un valor de señal (s (t) ) , un valor de deriva (v) , en el que el valor de deriva (v) es un valor de parámetro de diseño predeterminado, y un valor de retroalimentación (g (t -1) ) ;
- determinar un mayor (g (t) ) del valor calculado (y (t) ) y un primer valor predeterminado (P) ;
- comparar dicho valor mayor determinado (g (t) ) con un segundo valor predeterminado (h) ;
- retrasar dicho valor mayor determinado (g (t) ) y cambiar el estado de dicho valor mayor (g (t) para convertirse en un valor de retroalimentación actualizado (g (t-1) ) que se utiliza en una etapa de cálculo siguiente del valor (y (t) ) ;
caracterizado por
- calcular el valor de la señal s (t) dependiente de un valor absoluto de la diferencia entre las dos señales independientes (s1 (t) , s2 (t) )
y
- emitir sobre la base de la comparación una señal de aviso (w) si dicho valor mayor determinado (g (t) ) es igual o mayor que el segundo valor predeterminado (h) para indicar que las señales independientes (s1 (t) , s2 (t) ) difieren demasiado entre sí respecto al segundo valor predeterminado.
12. Procedimiento según la reivindicación 11, también caracterizado por la etapa de:
- limitar el valor mayor determinado (y (t) , P) del valor calculado (y (t) ) y el primer valor predeterminado (P) a un valor predeterminado (X) .
13. Procedimiento según cualquiera de las reivindicaciones 11 a 12, también caracterizado por la etapa de:
- seleccionar una fase de bucle del valor de retroalimentación actualizado (g (t-1) ) para proporcionar el valor de retroalimentación actualizado (g (t-1) ) de una manera predeterminada.
14. Procedimiento según la reivindicación 11, también caracterizado por la etapa de:
- no emitir la señal de alarma si se cumple un criterio predeterminado.
15. Procedimiento según la reivindicación 14, caracterizado porque el criterio predeterminado se define mediante un número predeterminado de valores generados g (t) menor que el valor umbral (g (t) <h) durante un periodo de tiempo predeterminado.
16. Procedimiento según cualquiera de las reivindicaciones 11 a 15, caracterizado por la etapa de:
- predeterminar el valor de deriva (v) .
17. Procedimiento según cualquiera de las reivindicaciones 11 a 16, caracterizado por las etapas de:
- calcular el valor absoluto de la diferencia entre las señales independientes (s1 (t) , s2 (t) ) ; e
- introducir el valor absoluto calculado.
18. Procedimiento según cualquiera de las reivindicaciones 11 a 17, caracterizado por la etapa de:
- generar cada una de las dos señales independientes generadas (s1 (t) , s2 (t) ) mediante un sensor separado (110, 120) .
19. Programa de ordenador que comprende un código de programa para realizar las etapas del procedimiento según cualquiera de las reivindicaciones 11 a 18, cuando el programa de ordenador se ejecuta en un ordenador.
20. Producto de programa de ordenador, que comprende un código de programa almacenado en un soporte legible por ordenador para realizar el procedimiento de las etapas según cualquiera de las reivindicaciones 11 a 18, cuando el programa de ordenador se ejecuta en un ordenador.
21. Producto de programa informático directamente almacenable en una memoria interna de un ordenador, que
comprende un programa de ordenador para realizar las etapas del procedimiento según cualquiera de las reivindicaciones 11 a 18, cuando el programa de ordenador se ejecuta en un ordenador.
Patentes similares o relacionadas:
Dispositivo de control redundante y método de sistema de HVDC, del 22 de Julio de 2020, de LSIS Co., Ltd: Un dispositivo de control redundante de un sistema de transmisión de corriente continua de alto voltaje (HVDC), el dispositivo de control redundante […]
Instalación de quemador con un dispositivo de seguridad, del 22 de Enero de 2020, de SIEMENS AKTIENGESELLSCHAFT: Instalación de quemador, en particular sistema de quemador de gas o sistema de quemador de fuel, con un dispositivo de seguridad, dicho dispositivo […]
Sistema de seguridad automatizado de una instalación industrial, del 1 de Enero de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Sistema de seguridad automatizado de una instalación industrial que comprende una pluralidad de sensores destinados a tomar medidas de un proceso industrial, […]
Método y sistema de refrigeración redundante, del 5 de Diciembre de 2019, de Dawes, Warwick Graham Andrew: Un método para implementar un sistema de refrigeración redundante para proporcionar una carga de refrigeración máxima predeterminada para el aire en un espacio acondicionado […]
Procedimiento para monitorear al menos dos sensores redundantes, del 21 de Agosto de 2019, de BAYER AKTIENGESELLSCHAFT: Procedimiento implementado en ordenador para monitorear al menos dos sensores redundantes , que están dispuestos en particular […]
Calculador, conjunto de comunicación que consta de tal calculador, sistema de gestión ferroviaria que consta de tal conjunto y procedimiento de fiabilidad de datos en un calculador, del 18 de Mayo de 2016, de ALSTOM Transport Technologies: Procedimiento de fiabilidad de datos en un calculador , siendo el calculador apto para proporcionar un dato de salida (Ds) a partir […]
 Sistema de control de turbina eólica con votación descentralizada, del 23 de Marzo de 2016, de VESTAS WIND SYSTEMS A/S: Sistema de control con tolerancia a fallos para una turbina eólica que comprende una pluralidad de componentes de turbina eólica controlables, […]
Sistema de control de turbina eólica con votación descentralizada, del 23 de Marzo de 2016, de VESTAS WIND SYSTEMS A/S: Sistema de control con tolerancia a fallos para una turbina eólica que comprende una pluralidad de componentes de turbina eólica controlables, […]
 Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad, del 26 de Enero de 2016, de PHOENIX CONTACT GMBH & CO. KG: Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad , con una primera instalación de control controlada por […]
Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad, del 26 de Enero de 2016, de PHOENIX CONTACT GMBH & CO. KG: Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad , con una primera instalación de control controlada por […]