DETECTOR DE BLANCOS MÓVILES PARA SISTEMAS DE RADAR.
Detector de blancos móviles (108, 108) para procesar datos de entrada con el fin de proporcionar datos de detección,
comprendiendo el detector de blancos móviles: un módulo de bancos de filtros Doppler (110) para procesar los datos de entrada con el fin de proporcionar varias salidas Doppler par a una celda de distancia actual y un intervalo de procesado coherente; un multiplexor de líneas de distancia (142) para proporcionar los datos de detección; caracterizado porque comprende una vía de procesado de señales de ecos parásitos terrestres (118) para proporcionar unos primeros resultados de detección basados en las diversas salidas Doppler a través de varios intervalos de procesado coherentes con el fin de proporcionar una capacidad de detección de blancos en varias condiciones de los ecos parásitos; una vía de procesado de señales de ecos parásitos no terrestres (120) para proporcionar unos segundos resultados de detección basados en las diversas salidas Doppler a través de varios intervalos de procesado coherentes con el fin de proporcionar una detección de blancos mejorada en distancias lejanas con ausencia de ecos parásitos terrestres; un módulo lógico de conmutación (114) para seleccionar una de la vía de procesado de señales de ecos parásitos terrestres (118) y la vía de procesado de señales de ecos parásitos no terrestres (120) basándose en información de ecos parásitos, y en el que el multiplexor de líneas de distancia combina los primeros y los segundos resultados de detección a través de una pluralidad de celdas de distancia para proporcionar los datos de detección
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/023104.
Solicitante: RAYTHEON CANADA LIMITED.
Nacionalidad solicitante: Canadá.
Dirección: 360 ALBERT STREET, SUITE 1640 OTTAWA, ON K1R 7X7 CANADA.
G01S13/524FISICA. › G01METROLOGIA; ENSAYOS. › G01SLOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › basada en el cambio de fase o de frecuencia provocado por el movimiento de los objetos, respecto a las señales transmitidas, p. ej. MTI coherente.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
En la presente memoria se dan a conocer varias formas de realización que se refieren a un Detector de Blancos Móviles (MTD) para su uso en un sistema de radar con el fin de detectar blancos en presencia de ecos parásitos y ruido. Antecedentes Los sistemas de radar usados para el control del tráfico aéreo, así como otros fines, necesitan hacer frente a algo más que el ruido del receptor ya que reciben también ecos (es decir, ecos parásitos) de condiciones medioambientales naturales tales como la tierra, el mar y condiciones meteorológicas. Cuando aparecen en la misma celda de radar que los blancos, los retornos de ecos parásitos pueden bloquear la detección de los blancos ya que el retorno del eco parásito puede ser mayor que los blancos en varios órdenes de magnitud. Una opción para detectar blancos móviles en medio de un eco parásito de gran tamaño es aprovechar los diferentes desplazamientos Doppler entre los blancos y el eco parásito. Un Indicador de Blancos Móviles (MTI) es un ejemplo de una técnica que aprovecha esta propiedad, y se ha estado explotando en este campo durante décadas. Un Detector de Blancos Móviles (MTD) es un sucesor más avanzado del MTI, y representa un avance significativo en la detección de blancos con ecos parásitos. El MTD tiene además la capacidad de detectar blancos tangenciales grandes con la ayuda de mapas de ecos parásitos. Puesto que el mismo fue desarrollado originalmente por el MIT Lincoln Laboratory en la década de los setenta, el MTD ha evolucionado a través de varias generaciones. En un MTD convencional de la generación actual, se transmite una ráfaga de impulsos a una frecuencia de repetición de impulsos (PRF) constante, a cuyos retornos se les denomina intervalo de procesado coherente (CPI) en la recepción. En general, la PRF se escalona de un CPI a otro con el fin de eliminar la velocidad de escape a la detección. Se aplica un banco de filtros Doppler recorriendo los impulsos recibidos en cada CPI para separar los blancos móviles del eco parásito. La salida de cada filtro Doppler es procesada por un detector de Tasa Constante de Falsas Alarmas (CFAR) que usa un mapa dinámico de ecos parásitos. El mapa dinámico de ecos parásitos permite la detección de grandes blancos tangenciales que, de otro modo, serían cancelados por un MTI común, y ayuda también a controlar la irrupción de falsas alarmas de los filtros de Doppler diferente de cero. O bien durante la fase de detección o bien durante la fase de postedición de las representaciones gráficas también se pueden utilizar otros mapas tales como un mapa de Control Temporal de Sensibilidad (STC) digital y un mapa geo-censor, con el fin de controlar los ecos parásitos y/u otras interferencias geográficas, tal como es sabido comúnmente por los expertos en la materia. Las detecciones de los detectores de CFAR se fusionan, y las detecciones finales se integran adicionalmente en un integrador binario antes de ser enviadas a un extractor de representaciones gráficas para el cálculo de los centroides en azimut y distancia. El integrador binario establece correlaciones de las detecciones de varios CPIs consecutivos para controlar alarmas falsas debidas a ecos parásitos o blancos cuyos ecos se reciben un periodo de escucha tarde. No obstante, en el integrador binario se produce una pérdida de información ya que sus entradas son resultados de detección (0 ó 1), lo cual da como resultado una pérdida de la ganancia de procesado. El documento EP 0 132 232 da a conocer un procesador de MTD para un radar de vigilancia con un banco de filtros Doppler y un sistema de umbrales tanto seleccionables como dependientes de la interfaz. La patente US nº 5.798.728 da a conocer un aparato de procesado de señales de radar. La patente US nº 5.644.315 da a conocer un radar de detección de relaciones Doppler con CFAR de distancia. Sumario La invención se define en las reivindicaciones, a las cuales se hace referencia a continuación. La vía de ecos parásitos no terrestres puede comprender además un módulo lógico de activación del cancelador de ecos parásitos meteorológicos para comprobar un mapa meteorológico dinámico en relación con los ecos parásitos meteorológicos y activar el cancelador de ecos parásitos meteorológicos cuando se halla el eco parásito meteorológico, y un módulo de mapa meteorológico acoplado al módulo lógico de activación del cancelador de ecos parásitos meteorológicos para generar y actualizar el mapa meteorológico dinámico. La información de ecos parásitos puede comprender una tabla de valores de distancia de transición que incluye por lo menos un valor de distancia de transición para cada segmento de azimut de los datos del radar. El módulo lógico de conmutación se puede configurar para seleccionar la vía de ecos parásitos no terrestres cuando la celda de distancia actual se encuentra a una distancia mayor que un valor de distancia de transición máximo con un segmento de azimut correspondiente en la tabla de valores de distancia de transición. 2 Alternativamente, el módulo lógico de conmutación se puede configurar para seleccionar la vía de ecos parásitos no terrestres cuando la celda de distancia actual se encuentra a una distancia mayor que un número impar de valores de distancia de transición con un segmento de azimut correspondiente en la tabla de valores de distancia de transición. Se puede obtener por lo menos un valor de distancia de transición para uno de los segmentos de azimut a partir de valores de distancia correspondientes a células con un segmento de azimut correspondiente en un mapa de ecos parásitos que tiene un nivel de ecos parásitos menor que un umbral de ecos parásitos. El mapa de ecos parásitos puede ser un mapa dinámico de ecos parásitos cuando se detecta una propagación anómala, y un mapa de ecos parásitos de día despejado en cualquier otro caso. Alternativamente, se puede obtener por lo menos un valor de transición para uno de los segmentos de azimut a partir de un máximo de: un primer valor de distancia máximo para una celda del mapa de ecos parásitos de día despejado con un segmento de azimut correspondiente que tiene un primer nivel de ecos parásitos mayor que un primer umbral, un segundo valor de distancia máximo para una celda del mapa dinámico de ecos parásitos con el segmento de azimut correspondiente que tiene un nivel de ecos parásitos mayor que un segundo umbral más el primer nivel de ecos parásitos, y un tercer valor de distancia máximo para una celda del mapa meteorológico dinámico con el segmento de azimut correspondiente que tiene un nivel de ecos parásitos mayor que un tercer umbral. El mapa de ecos parásitos puede ser un mapa dinámico de ecos parásitos cuando se detecta una propagación anómala, y un mapa de ecos parásitos de día despejado en cualquier otro caso. En este caso, el módulo lógico de conmutación se puede configurar para seleccionar la vía de ecos parásitos no terrestres cuando un primer nivel de ecos parásitos en una celda del mapa de ecos parásitos de día despejado correspondiente a la celda de distancia actual es menor que un primer umbral, un segundo nivel de ecos parásitos en una celda del mapa dinámico de ecos parásitos de día correspondiente a la celda de distancia actual es menor que un segundo umbral más el primer nivel de ecos parásitos, y un tercer nivel de ecos parásitos en una celda del mapa meteorológico dinámico correspondiente a la celda de distancia actual es menor que un tercer umbral. Alternativamente, el módulo lógico de conmutación se puede configurar para seleccionar la vía de ecos parásitos no terrestres cuando un primer nivel de ecos parásitos en una celda del mapa de ecos parásitos de día despejado correspondiente a la celda de distancia actual es menor que un primer umbral, un segundo nivel de ecos parásitos en una celda del mapa dinámicos de ecos parásitos de día correspondiente a la celda de distancia actual es mayor que un segundo umbral más el primer nivel de ecos parásitos, y un tercer nivel de ecos parásitos en una celda del mapa meteorológico dinámico correspondiente a la celda de distancia actual es mayor que un tercer umbral y menor que un cuarto umbral. La vía de ecos parásitos terrestres puede comprender un módulo de detección de CFAR para procesar los diversos conjuntos de datos de entrada con el fin de proporcionar varias salidas de CFAR, un módulo de fusión Doppler para procesar las diversas salidas de CFAR con el fin de seleccionar la salida de CFAR más grande, y un integrador binario para proporcionar los primeros resultados de detección procesando diversas salidas de CFAR más grandes seleccionadas con el fin de indicar una detección cuando una proporción mínima de las diversas salidas de CFAR más grandes seleccionadas indica un blanco detectado. El módulo de detección... [Seguir leyendo]
Reivindicaciones:
1. Detector de blancos móviles (108, 108) para procesar datos de entrada con el fin de proporcionar datos de detección, comprendiendo el detector de blancos móviles: un módulo de bancos de filtros Doppler (110) para procesar los datos de entrada con el fin de proporcionar varias salidas Doppler par a una celda de distancia actual y un intervalo de procesado coherente; un multiplexor de líneas de distancia (142) para proporcionar los datos de detección; caracterizado porque comprende una vía de procesado de señales de ecos parásitos terrestres (118) para proporcionar unos primeros resultados de detección basados en las diversas salidas Doppler a través de varios intervalos de procesado coherentes con el fin de proporcionar una capacidad de detección de blancos en varias condiciones de los ecos parásitos; una vía de procesado de señales de ecos parásitos no terrestres (120) para proporcionar unos segundos resultados de detección basados en las diversas salidas Doppler a través de varios intervalos de procesado coherentes con el fin de proporcionar una detección de blancos mejorada en distancias lejanas con ausencia de ecos parásitos terrestres; un módulo lógico de conmutación (114) para seleccionar una de la vía de procesado de señales de ecos parásitos terrestres (118) y la vía de procesado de señales de ecos parásitos no terrestres (120) basándose en información de ecos parásitos, y en el que el multiplexor de líneas de distancia combina los primeros y los segundos resultados de detección a través de una pluralidad de celdas de distancia para proporcionar los datos de detección. 2. Detector de blancos móviles según la reivindicación 1, en el que la vía de procesado de señales de ecos parásitos no terrestres (120) comprende: un selector de picos (130) para recibir varios conjuntos de datos de entrada relacionados con las diversas salidas Doppler y proporcionar un conjunto de datos de salida de picos seleccionando el conjunto de datos de entrada que presenta la mayor potencia; un integrador de vídeo (132) para integrar en vídeo los datos de salida de picos a través de varios intervalos de procesado coherentes con el fin de proporcionar datos integrados en vídeo; y un detector (134) para procesar los datos integrados en vídeo con el fin de generar los segundos resultados de detección. 3. Detector de blancos móviles según la reivindicación 2, en el que la vía de procesado de señales de ecos parásitos no terrestres (120) comprende además un módulo de supresión de blancos cuyos ecos se reciben un periodo de escucha tarde (136) para reducir resultados de detección erróneos en los segundos resultados de detección. 4. Detector de blancos móviles según la reivindicación 2, en el que la vía de procesado de señales de ecos parásitos no terrestres (120) comprende además: un cancelador de ecos parásitos meteorológicos (128) para reducir ecos parásitos meteorológicos en los diversos conjuntos de datos de entrada antes del procesado por parte del selector de picos (130); un módulo lógico de activación del cancelador de ecos parásitos meteorológicos (138) para comprobar un mapa meteorológico dinámico en relación con los ecos parásitos meteorológicos y activar el cancelador de ecos parásitos meteorológicos cuando se halla un eco parásito meteorológico; y un módulo de mapa meteorológico (140) acoplado al módulo lógico de activación del cancelador de ecos parásitos meteorológicos para generar y actualizar el mapa meteorológico dinámico. 5. Detector de blancos móviles según la reivindicación 2, en el que el detector (134) es un detector de Tasa Constante de Falsas Alarmas, CFAR, con promediado de celdas, configurado para utilizar un umbral de promedio de primera distancia y última distancia con picos editados, un umbral de valor escalado del mapa dinámico de ecos parásitos no terrestres para el píxel, un umbral de mapa de control temporal de sensibilidad digital basado en sección transversal mínima, y un umbral de mapa geo-censor. 6. Detector de blancos móviles según la reivindicación 2, que comprende además una tabla de valores de distancia de transición (152) adaptada para almacenar por lo menos un valor de distancia de transición para seleccionar resultados de detección o bien de la vía de procesado de señales de ecos parásitos terrestres (118) o bien de la vía de procesado de señales de ecos parásitos no terrestres (120) para cada segmento de azimut de los datos de radar; y en el que la información de ecos parásitos se obtiene a partir de dicho por lo menos un valor de distancia de transición para cada segmento de azimut correspondiente a la celda de distancia actual. 7. Detector de blancos móviles según la reivindicación 2, que comprende además un mapa de ecos parásitos que tiene almacenada en el mismo información de ecos parásitos, y en el que el módulo lógico de conmutación está configurado para seleccionar la vía de procesado de señales de ecos parásitos terrestres (118) cuando el nivel de ecos parásitos en una celda del mapa de ecos parásitos que se corresponde con la celda de distancia actual es mayor que un umbral de ecos parásitos y para seleccionar, en cualquier otro caso, la vía de procesado de señales de ecos parásitos no terrestres (120). 8. Detector de blancos móviles según la reivindicación 2, en el que la información de ecos parásitos comprende un mapa de ecos parásitos de día despejado (148), un mapa dinámico de ecos parásitos (146) y un mapa meteorológico dinámico (150), y el módulo lógico de conmutación (114) está configurado para ejecutar una umbralización sobre cada uno de los mapas, combinar los resultados de la umbralización y seleccionar una de la vía de procesado de señales de ecos parásitos no terrestres (120) y la vía de procesado de señales de ecos parásitos terrestres (118) basándose en el resultado de la umbralización combinado. 9. Detector de blancos móviles según la reivindicación 2, en el que la vía de procesado de señales de ecos parásitos terrestres (118) comprende: un módulo de detección de CFAR (122) para procesar los diversos conjuntos de datos de entrada con el fin de proporcionar varias salidas de CFAR; un módulo de fusión Doppler (124) para procesar las diversas salidas de CFAR con el fin de seleccionar la salida de CFAR más grande; y un integrador binario (126) para proporcionar los primeros resultados de detección procesando varias salidas de CFAR más grandes seleccionadas con el fin de indicar una detección cuando una proporción mínima de las varias salidas de CFAR más grandes seleccionadas indica un blanco detectado pasando a través de un número específico de intervalos de procesado coherentes. 10. Detector de blancos móviles según la reivindicación 2, en el que el módulo de bancos de filtros Doppler (110) comprende un banco de filtros Doppler para condiciones despejadas (174), y un banco de filtros Doppler de ecos parásitos (172), en el que el banco de filtros Doppler para condiciones despejadas (174) está operativo cuando la celda de distancia actual está a una distancia mayor que un valor de distancia de transición máximo con un segmento de azimut correspondiente en una tabla de valores de distancias de transición (152), y en cualquier otro caso está operativo el banco de filtros Doppler de ecos parásitos (172). 11. Método de procesado de datos de radar de entrada para proporcionar datos de detección, comprendiendo el método: procesar los datos de radar de entrada para proporcionar varias salidas Doppler para una celda de distancia actual y un intervalo de procesado coherente; determinar si existe un eco parásito terrestre para la celda de distancia actual basándose en información de ecos parásitos; proporcionar unos primeros resultados de detección basándose en las diversas salidas Doppler a través de varios intervalos de procesado coherentes usando una vía de procesado de señales de ecos parásitos terrestres cuando se detecta un eco parásito terrestre para la celda de distancia actual; proporcionar unos segundos resultados de detección basándose en laS diversas salidas Doppler a través de varios intervalos de procesado coherentes usando una vía de procesado de señales de ecos parásitos no terrestres cuando no se detecta un eco parásito terrestre para la celda de distancia actual; y combinar los primeros y segundos resultados de detección a través de una pluralidad de celdas de distancia. 12. Método según la reivindicación 11, en el que proporcionar los segundos resultados de detección comprende: 16 procesar varios conjuntos de datos de entrada relacionados con las diversas salidas Doppler para proporcionar datos de salida de pico seleccionando el conjunto de datos de entrada que tiene la potencia más grande; integrar en vídeo los datos de salida de pico a través de varios intervalos de procesado coherentes para proporcionar datos integrados en vídeo; y realizar una detección sobre los datos integrados en vídeo para generar los segundos resultados de detección. 13. Método según la reivindicación 12, en el que el método comprende además realizar una supresión de blancos cuyos ecos se reciben un tiempo de escucha tarde para reducir resultados de detección erróneos en los segundos resultados de detección. 14. Método según la reivindicación 12, en el que el método comprende además reducir ecos parásitos meteorológicos en los diversos conjuntos de datos de entrada antes del procesado para proporcionar los datos de salida de pico cuando se detecta un eco parásito meteorológico. 15. Método según la reivindicación 12, en el que la detección comprende realizar una detección de CFAR con promediado de celdas basada en un umbral de promedio de primera distancia y última distancia con picos editados, un umbral de valor escalado del mapa dinámico de ecos parásitos no terrestres para el píxel, un umbral del mapa de control temporal de sensibilidad digital basado en sección transversal mínima, y un umbral del mapa geo-censor. 16. Método según la reivindicación 12, en el que la información de ecos parásitos se almacena en una tabla de valores de distancias de transición que incluye por lo menos un valor de distancia de transición para cada segmento de azimut de los datos de radar. 17. Método según la reivindicación 12, que comprende además: comparar con un umbral de ecos parásitos un nivel de ecos parásitos en una celda correspondiente a la celda de distancia actual de un mapa de ecos parásitos que tiene almacenada en el mismo la información de ecos parásitos; en respuesta a que el nivel de ecos parásitos de la celda de distancia actual sea mayor que el umbral de ecos parásitos, seleccionar la vía de ecos parásitos terrestres; y en respuesta a que el nivel de ecos parásitos de la celda de distancia actual sea menor que o igual al umbral de ecos parásitos, seleccionar la vía de ecos parásitos no terrestres. 18. Método según la reivindicación 12, en el que la información de ecos parásitos comprende un mapa de ecos parásitos de día despejado, un mapa dinámico de ecos parásitos y un mapa meteorológico dinámico, y el método comprende ejecutar una umbralización sobre cada uno de los mapas, combinar los resultados de la umbralización y usar una de la vía de ecos parásitos no terrestres y la vía de ecos parásitos terrestres basándose en el resultado de la umbralización combinado. 19. Método según la reivindicación 12, en el que proporcionar los primeros resultados de detección comprende: realizar una detección de CFAR sobre los diversos conjuntos de datos de entrada para proporcionar varias salidas de CFAR; procesar las diversas salidas de CFAR para seleccionar la salida de CFAR más grande; y proporcionar los primeros resultados de detección procesando varias salidas de CFAR más grandes seleccionadas con el fin de indicar una detección cuando una proporción mínima de las diversas salidas de CFAR más grandes seleccionadas indica un blanco detectado. 20. Método según la reivindicación 12, en el que el método comprende usar uno de entre un banco de filtros Doppler para condiciones despejadas y un banco de filtros Doppler de ecos parásitos para proporcionar las diversas salidas Doppler, en el que el banco de filtros Doppler para condiciones despejadas se usa cuando la celda de distancia actual está a una distancia mayor que un valor de distancia de transición máximo con un segmento de azimut correspondiente en una tabla de valores de distancias de transición, y en cualquier otro caso se usa el banco de filtros Doppler de ecos parásitos. 17 18 19 21 22 23 24 26 27 28
Patentes similares o relacionadas:
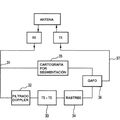
PROCEDIMIENTO DE GESTIÓN DE FORMA DE ONDA QUE UTILIZA UNA CARTOGRAFÍA DOPPLER POR SEGMENTACIÓN ESTADÍSTICA, del 3 de Marzo de 2011, de THALES: Procedimiento de gestión de las formas de ondas emitidas por un sistema de detección electromagnética, caracterizado porque comprende al menos: - una etapa de tratamiento […]
Codificador de señal de localización para un dispositivo de señal de localización y procedimiento asociado, del 6 de Mayo de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Codificador de señal de localización para un dispositivo de localización , que funciona en base a una señal de localización con una […]
Operación de radar con capacidad Doppler aumentada, del 20 de Febrero de 2019, de Lee, Robert W: Método para utilizar reflexiones de energía de ondas de uno o de varios objetos reflejantes para caracterizar ciertas propiedades de estos […]
Método para evitar falsas detecciones en sensores, del 21 de Junio de 2017, de BAE SYSTEMS PLC: Método para evitar falsas detecciones en sensores, en que el método comprende los pasos de:
a) recibir una ráfaga de señales de entrada en un sensor;
b) […]
Un método de estimación de una densidad de trazado local en un sistema de radar; un estimador de la densidad de trazado y un sistema de radar con un estimador de la densidad de trazado, del 22 de Febrero de 2017, de Terma A/S: Un método de estimación de la densidad de trazado local en un sistema de radar que observa un volumen de observación y configurado para generar […]
Un método para detectar un retorno de eco parásito en un sensor, del 8 de Febrero de 2017, de BAE SYSTEMS PLC: Un método para detectar un retorno de eco parásito en un sensor, en particular un sistema de radar, comprendiendo el método:
a) recibir una […]
Mitigación de turbina eólica en sistemas de radar, del 2 de Marzo de 2016, de BAE SYSTEMS PLC: Un método para hacer funcionar un Radar ATC , que comprende las etapas de:
recibir señales En fase (I) y Cuadratura (Q);
crear un primer y […]
Sensor para determinar una velocidad, del 31 de Octubre de 2013, de BAE SYSTEMS PLC: Un sensor para detectar si una señal recibida ha sido devuelta bien por un objeto que se mueve a unavelocidad umbral o por encima de la misma o por un objeto que […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 PROCEDIMIENTO DE GESTIÓN DE FORMA DE ONDA QUE UTILIZA UNA CARTOGRAFÍA DOPPLER POR SEGMENTACIÓN ESTADÍSTICA, del 3 de Marzo de 2011, de THALES: Procedimiento de gestión de las formas de ondas emitidas por un sistema de detección electromagnética, caracterizado porque comprende al menos: - una etapa de tratamiento […]
PROCEDIMIENTO DE GESTIÓN DE FORMA DE ONDA QUE UTILIZA UNA CARTOGRAFÍA DOPPLER POR SEGMENTACIÓN ESTADÍSTICA, del 3 de Marzo de 2011, de THALES: Procedimiento de gestión de las formas de ondas emitidas por un sistema de detección electromagnética, caracterizado porque comprende al menos: - una etapa de tratamiento […] Mitigación de turbina eólica en sistemas de radar, del 2 de Marzo de 2016, de BAE SYSTEMS PLC: Un método para hacer funcionar un Radar ATC , que comprende las etapas de:
recibir señales En fase (I) y Cuadratura (Q);
crear un primer y […]
Mitigación de turbina eólica en sistemas de radar, del 2 de Marzo de 2016, de BAE SYSTEMS PLC: Un método para hacer funcionar un Radar ATC , que comprende las etapas de:
recibir señales En fase (I) y Cuadratura (Q);
crear un primer y […] Sensor para determinar una velocidad, del 31 de Octubre de 2013, de BAE SYSTEMS PLC: Un sensor para detectar si una señal recibida ha sido devuelta bien por un objeto que se mueve a unavelocidad umbral o por encima de la misma o por un objeto que […]
Sensor para determinar una velocidad, del 31 de Octubre de 2013, de BAE SYSTEMS PLC: Un sensor para detectar si una señal recibida ha sido devuelta bien por un objeto que se mueve a unavelocidad umbral o por encima de la misma o por un objeto que […]