SISTEMA DE SALVAMENTO.
Sistema de salvamento, para emergencias próximas a la costa, con al menos un dispositivo robotizado volador,
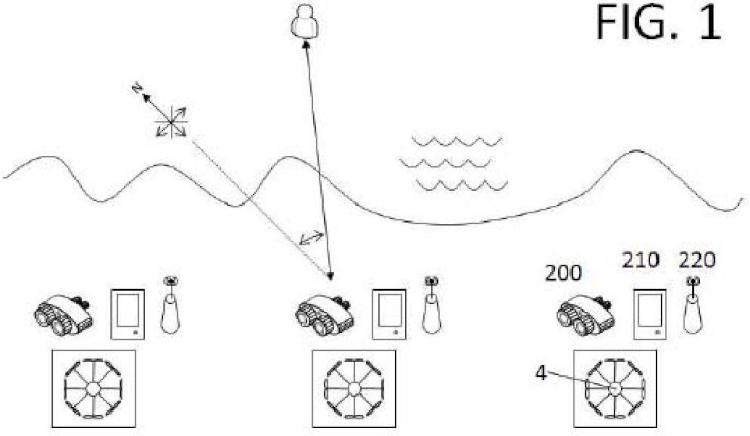
RPAS (4) (drone, multicóptero,...); un subsistema cliente de salvamento (2) que identifica la posición de la emergencia y transmite las coordenadas al RPAS (4), el cual posee un subsistema de dispositivos de vuelo (1) que gestiona su traslado al punto de emergencia y la liberación de la carga de socorro, y un subsistema de comunicaciones (3), por ejemplo inalámbrico, entre ambos. La posición de la emergencia se puede calcular a partir de las medidas de acimut y distancia, calculadas por unos prismáticos de observación (200). El RPAS (4) puede comprender una videocámara (120), altavoz (140) o luces estroboscópicas (160).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430450.
Solicitante: UNIVERSIDAD DE HUELVA.
Nacionalidad solicitante: España.
Inventor/es: ANDUJAR MARQUEZ,JOSE MANUEL, MEJÍAS BORRERO,Andrés, MÁRQUEZ SÁNCHEZ,Marco Antonio, SÁNCHEZ HERRERA,María Reyes.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C39/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 39/00 Aeronaves no previstas en otro lugar. › caracterizadas por un uso especial.
Fragmento de la descripción:
SISTEMA DE SALVAMENTO
SECTOR DE LA TÉCNICA
La presente invención se refiere a un sistema completo, capaz de hacer llegar a una persona en peligro de ahogamiento (bañistas, tripulantes de flotadores, pequeñas embarcaciones, etc.) material de emergencia como un chaleco salvavidas, desde una base o un puesto de salvamento localizado en tierra, mediante un dispositivo robotizado volador, denominado científicamente RPAS (Remotely Piloted Aerial/Aircraft/Air System) y que adopta en la sociedad en general nombres como UAV, UAS, VANT, multicóptero o drone, según su variante (en adelante se adoptará el nombre genérico de RPAS).
El sistema es capaz de llegar al punto exacto donde se encuentra la persona en peligro de ahogamiento de forma automática, mantener el vuelo sobre su posición y lanzar el material de emergencia en el punto preciso donde se encuentra. El RPAS puede disponer de una cámara de vídeo que envía al puesto de salvamento en tierra una imagen (preferiblemente con sonido) en tiempo real de la persona en peligro de ahogamiento desde baja altura. Al mismo tiempo, el RPAS puede disponer de un receptor de sonido y un altavoz, que permite al puesto de salvamento enviar instrucciones de voz.
El sistema de salvamento admite tanto una configuración monopuesto (un único RPAS) como una configuración con múltiples RPAS que trabajan en cooperación para cubrir una zona de costa más amplia. La posición exacta de la persona en peligro de ahogamiento es fijada mediante un sistema de control situado en el puesto de salvamento en tierra, apoyado en otros sistemas tal y como se describe en este documento.
ESTADO DE LA TÉCNICA
Tradicionalmente, el auxilio en las playas y zonas costeras de personas en peligro de ahogamiento, se realiza mediante personal especializado (socorristas) que cuenta con puestos de vigilancia situados a lo largo de la zona costera, y bajo la jurisdicción de los organismos pertinentes (en España normalmente Cruz Roja coordinada con Salvamento Marítimo) que cubren este servicio público.
Este servicio está formado por un componente humano (socorristas, personal médico, etc.) y un conjunto de recursos materiales, tales como lanchas neumáticas, motos acuáticas o sistemas de asistencia individual (flotadores personales, chalecos salvavidas, etc.) que el socorrista hace llegar a la persona en peligro de ahogamiento bien a nado o usando recursos motorizados como los ya citados.
No obstante, estos medios requieren en todo momento un total desempeño del componente humano y pueden ser lentos. El tiempo necesario para hacer llegar a la persona en peligro de ahogamiento una primera ayuda para su supervivencia depende de factores tales como la orografía de la zona costera, disponibilidad de lanchas de salvamento cercanas, distancia del equipo de socorro a los medios y a la zona donde se encuentra la persona en peligro de ahogamiento, etc.
Igualmente en las costas se disponen equipos de recepción de señales de socorro de embarcaciones. Cuando se aprecia una, se envía una embarcación o helicóptero de asistencia que rescata o asiste a las personas en riesgo.
Esto conlleva un tiempo de respuesta que en ocasiones es demasiado. Igualmente, cuando la emergencia incluye condiciones adversas climatológicas, de mareas o de oleaje, pone en riesgo al personal que acude a la emergencia.
El solicitante no conoce ningún sistema de salvamento costero o marítimo que aplique principios similares a los de la invención.
BREVE EXPLICACIÓN DE LA INVENCIÓN
Los servicios de salvamento marítimo costero, basados en torres de observación y socorristas en tierra, deben cubrir extensas zonas costeras, para proporcionar un servicio de asistencia a los bañistas y otros usuarios en posiciones relativamente cercanas a la costa.
El tiempo que transcurre desde que un socorrista localiza una persona en peligro de ahogamiento hasta que ésta recibe ayuda en el mar es un factor crítico, ya que de ello depende en muchos casos su supervivencia. Este tiempo de respuesta puede verse además fuertemente influenciado por la orografía de la zona, como por ejemplo la presencia de rocas y otros obstáculos. La invención que se presenta aquí optimiza el tiempo de respuesta mediante el uso de RPAS que llevan de forma inmediata y directa una primera ayuda a la
persona en peligro de ahogamiento en forma de un chaleco salvavidas de inflado automático.
Esta invención permite eliminar del tiempo de respuesta de un sistema de salvamento algunos de los factores que sí generan retraso en el método clásico (habitualmente consistente en lanchas neumáticas motorizadas, o motos acuáticas), como por ejemplo la orografía del terreno o el tiempo de preparación o la disponibilidad de la lancha de salvamento.
Desde el punto de vista de la orografía, el RPAS puede llegar en línea recta hasta la posición de la persona en peligro de ahogamiento o embarcación en riesgo, independientemente de los obstáculos que se encuentren en ese trayecto, y que son fácilmente evitables mediante el ajuste de la altura de vuelo en el trayecto.
La presente invención, por sus características, optimiza el tiempo necesario para hacer llegar a la persona en peligro de ahogamiento una primera ayuda, en forma de un dispositivo personal de salvamento, hasta que pueda llegar el personal de salvamento que proceda a su rescate.
Esto se realiza mediante un sistema informático en tierra (subsistema cliente de salvamento) que realiza los cálculos necesarios, y que programa y envía un RPAS de vuelo automático que lleva hasta la persona o personas en peligro de ahogamiento el material de emergencia, además de poder proporcionar al equipo de socorro una visión directa de la persona en peligro de ahogamiento mediante video en tiempo real, e incluso pudiéndole permitir dar instrucciones e información relevante a la persona en peligro o al resto de personal de salvamento. En las realizaciones más completas tiene un elevado grado de automatización, e incorpora todos los componentes hardware y software necesarios para que pueda ser manejado con facilidad por personal no especializado.
La invención consta de los elementos que se definen en la reivindicación primera, aunque posee varias realizaciones secundarias como se indica en las reivindicaciones dependientes.
En concreto, el sistema de salvamento consta de al menos un dispositivo robotizado volador, RPAS (drone, multicóptero u otros), con un subsistema de dispositivos de vuelo que gestiona su traslado al punto de emergencia señalado por un subsistema cliente de
salvamento que es el encargado de identificar la posición de la emergencia y transmitir las coordenadas al RPAS por un subsistema de comunicaciones, por ejemplo inalámbrico. El subsistema de dispositivos de vuelo decide igualmente sobre la liberación de la carga de socorro.
Para la localización de la emergencia se puede disponer de unos prismáticos de observación con medios para detectar la distancia y acimut de la emergencia respecto del socorrista que los porta, los cuales forman parte del subsistema cliente de salvamento. Como éste subsistema conoce la posición del socorrista o torre de observación, por ser fijos o disponer de un sistema propio de geolocalización, el subsistema cliente de salvamento puede calcular las coordenadas de la emergencia.
Preferentemente, el subsistema cliente de salvamento comprende un micrófono base y un sistema de transmisión inalámbrica de sonido, y el subsistema de dispositivos de vuelo comprende un receptor inalámbrico de audio conectado a un altavoz.
Es igualmente preferido que el subsistema de dispositivos de vuelo posea una videocámara y un sistema de transmisión inalámbrica de audio/vídeo para su emisión a un receptor de vídeo/audio dispuesto en el subsistema cliente de salvamento, que lo emite por un ordenador del socorrista o centro de control. La videocámara puede estar montada en un soporte autoestabilizado mediante una unidad de administración electrónica, y comprender medios de visión nocturna.
Además, el RPAS podrá disponer de elementos que faciliten su localización, por la persona en riesgo (lo cual se da seguridad de que el socorro va a venir pronto) o por los servicios de emergencia que acudan a rescatar a la persona en riesgo, que podrán localizar a ésta más fácilmente. Estos pueden ser unas luces estroboscópicas o el propio altavoz.
DESCRIPCIÓN DE LOS DIBUJOS
Para una mejor comprensión de la invención, se incluyen las siguientes figuras.
Figura 1. Vista general del sistema de la invención donde se señalan sus componentes principales.
Figura 2. Esquema de los componentes de un RPAS del subsistema de dispositivos de vuelo.
...
Reivindicaciones:
1- Sistema de salvamento para emergencias próximas a la costa, caracterizado por que comprende al menos un dispositivo robotizado volador, RPAS (4); un subsistema cliente de salvamento (2) que identifica la posición de la emergencia y transmite las coordenadas al RPAS (4), el cual posee un subsistema de dispositivos de vuelo (1) que gestiona su traslado al punto de emergencia y la liberación de la carga de socorro, y un subsistema de comunicaciones (3) entre ambos.
2- Sistema de salvamento, según la reivindicación primera, caracterizado en que el RPAS (4) es un multicóptero.
3- Sistema de salvamento, según cualquiera de las reivindicaciones anteriores, caracterizado por que el subsistema cliente de salvamento (2) comprende unos prismáticos de observación (200) con medios para detectar la distancia y acimut de la emergencia respecto del socorrista o torre de observación.
4- Sistema de salvamento, según la reivindicación 3, caracterizado por que el subsistema cliente de salvamento (2) calcula las coordenadas de la emergencia a partir de la distancia y el acimut, así como la posición del socorrista o torre de observación.
5- Sistema de salvamento, según cualquiera de las reivindicaciones anteriores,
caracterizado por que el subsistema cliente de salvamento (2) comprende un micrófono base (230) y un sistema de transmisión inalámbrica de sonido (231), y el subsistema de dispositivos de vuelo (1) comprende un receptor inalámbrico de audio (141) y un altavoz (140).
6- Sistema de salvamento, según cualquiera de las reivindicaciones anteriores,
caracterizado por que comprende una videocámara (120) en el RPAS (4) y un sistema de
transmisión inalámbrica de audio/vídeo (130) en el subsistema de dispositivos de vuelo (1), así como un receptor de vídeo/audio (220) en el subsistema cliente de salvamento (2).
7- Sistema de salvamento, según la reivindicación 6, caracterizado por que la videocámara
(120) está montada en un soporte autoestabilizado (121) mediante una unidad de
administración electrónica (122).
8- Sistema de salvamento, según cualquiera de las reivindicaciones 6 ó 7, caracterizado por que la videocámara (120) comprende medios de visión nocturna.
5 9- Sistema de salvamento, según cualquiera de las reivindicaciones anteriores,
caracterizado por que el subsistema de comunicaciones (3) es inalámbrico.
10- Sistema de salvamento, según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende unas luces estroboscópicas (160) en el subsistema de 10 dispositivos de vuelo (1).
Patentes similares o relacionadas:
DISPOSITIVO DE PURIFICACIÓN, DESINFECCIÓN Y CONTROL DE LA CALIDAD DEL AIRE Y ENTORNOS MEDIANTE DRON, del 7 de Julio de 2020, de TALESTECH, S.L.U: 1. Dispositivo de purificación, desinfección y control de la calidad del aire y entornos mediante dron (A) con capacidad para efectuar un vuelo […]
Sistema para el diagnóstico de turbinas eólicas de un generador eólico y método de diagnóstico de una turbina eólica, del 2 de Julio de 2020, de UNIVERSIDAD DE CASTILLA-LA MANCHA: Sistema para el diagnóstico de turbinas eólicas de un generador eólico , que comprende un vehículo aéreo no tripulado (UAV) previsto para acercarse a una turbina eólica […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Sistema y método para ocultar dinámicamente video e imágenes capturadas con una cámara de dispositivo dron, del 10 de Junio de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: dar instrucciones a un dispositivo dron para que vuele cerca de una potencial área de vigilancia mientras está en […]
Geometría de ala de aeronave de gran altitud, del 10 de Junio de 2020, de Stratospheric Platforms Limited: Una aeronave no tripulada de larga duración de gran altitud que comprende una estructura del ala, un fuselaje y una cola, que opera por encima de 15 […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
Dron neumático, del 3 de Junio de 2020, de San Jorge Tecnológicas, S.L: Un vehículo volador no tripulado con una o más hélices las cuales están conectadas a uno o más motores neumáticos adaptados para ser accionados por un fluido, caracterizados […]
Dispositivo de protección de Vehículo Aéreo No Tripulado (VANT) frente al impacto y a las altas temperaturas, del 29 de Mayo de 2020, de ARES LAVADO, ALVARO: 1. Dispositivo de protección de vehículo aéreo no tripulado (VANT) frente al impacto y a las altas temperaturas, caracterizado porque presenta: - […]