Controlador de vehículo eléctrico.
Controlador de vehículo eléctrico que incluye un motor de C.A.
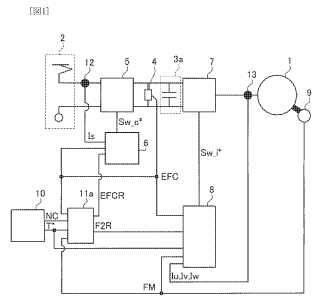
(1), el controlador de vehículo eléctrico comprendiendo: un circuito principal (7) configurado para convertir una electricidad de C.C: suministrada por una fuente de alimentación de C.C. en una electricidad de C.A. y suministrar la electricidad de C.A. al motor de C.A. (1); una unidad de control vectorial (8) configurada para generar una orden de conmutación para ordenar una operación de conmutación del circuito principal (7), realizando asi el control vectorial del motor de CA (1); una unidad generadora de valores de orden de par motor (10) configurada para generar un valor de orden de par motor que es un valor de orden de un par motor que el motor de C.A. (1) hace que se produzca; y una unidad de cálculo del valor de orden de control vectorial (11 a; 11 c) configurada para calcular, a partir del valor de orden de par motor, un primer valor de orden de flujo magnético para minimizar una pérdida del motor de C.A. (1), y un segundo valor de orden de flujo magnético, que es un valor de orden de flujo magnético cuando el motor de C.A. (1) es controlado en un modo de un pulso, calcular una primera suma total de pérdidas del motor de C.A. (1) Y las pérdidas del circuito principal (7) cuando el motor de CA (1) es controlado por el primer valor de orden de flujo magnético y una segunda suma total de pérdidas del motor de C.A. (1) Y las pérdidas del circuito principal (7) cuando el motor de C.A. (1) es controlado por el segundo valor de orden de flujo magnético. en donde la unidad de cálculo del valor de orden de control vectorial (11a; 11c) es configurada además para enviar el primer valor de orden de flujo magnético a la unidad de control vectorial (8) cuando la primera suma total es inferior a la segunda suma total, y enviar el segundo valor de orden de flujo magnético a la unidad de control vectorial (8) cuando la primera suma total es igualo superior a la segunda suma total.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2007/054536.
Solicitante: MITSUBISHI ELECTRIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 7-3, MARUNOUCHI 2-CHOME CHIYODA-KU TOKYO 100-8310 JAPON.
Inventor/es: YAMASAKI,Hisanori.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60L9/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 9/00 Propulsión eléctrica a partir de energía externa al vehículo (propulsión eléctrica para vehículos mono rail, vehículos suspendidos o ferrocarriles de cremallera B60L 13/00; en combinación con baterías o pilas de combustible en el vehículo B60L 50/53). › alimentados por líneas de corriente continua.
- H02M7/5387 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02M APARATOS PARA LA TRANSFORMACION DE CORRIENTE ALTERNA EN CORRIENTE ALTERNA, DE CORRIENTE ALTERNA EN CORRIENTE CONTINUA O DE CORRIENTE CONTINUA EN CORRIENTE CONTINUA Y UTILIZADOS CON LAS REDES DE DISTRIBUCION DE ENERGIA O SISTEMAS DE ALIMENTACION SIMILARES; TRANSFORMACION DE UNA POTENCIA DE ENTRADA EN CORRIENTE CONTINUA O ALTERNA EN UNA POTENCIA DE SALIDA DE CHOQUE; SU CONTROL O REGULACION (transformadores H01F; convertidores dinamoeléctricos H02K 47/00; control de los transformadores, reactancias o bobinas de choque, control o regulación de motores, generadores eléctricos o convertidores dinamoeléctricos H02P). › H02M 7/00 Transformación de una potencia de entrada en corriente alterna en una potencia de salida en corriente continua; Transformación de una potencia de entrada en corriente continua en una potencia de salida en corriente alterna. › en una configuración en puente.
- H02P21/00 H02 […] › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo.
- H02P21/12 H02P […] › H02P 21/00 Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo. › Control basado en el flujo del estátor implicando la utilización de sensores de posición de rotor o sensores de velocidad del rotor.
- H02P27/04 H02P […] › H02P 27/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de voltaje de alimentación (de dos o más motores H02P 5/00; de motores síncronos con conmutadores electrónicos H02P 6/00; de motores de corriente continua H02P 7/00; de motores paso a paso H02P 8/00). › utilizando la tensión de alimentación de frecuencia variable, p. ej. la tensión de alimentación de inversores o de convertidores.
- H02P27/06 H02P 27/00 […] › utilizando inversores o convertidores CC-CA (H02P 27/05 tiene prioridad).
PDF original: ES-2384001_T3.pdf
Fragmento de la descripción:
Controlador de vehículo eléctrico
CAMPO TÉCNICO
La presente invención se refiere a un convertidor de corriente para vehículos ferroviarios, y, más especialmente a un controlador de vehículos eléctricos que incluyen un motor de C.A.
TÉCNICA ANTERIOR
Como se describe en las páginas 99 a 134 del Documento no patente 1, por ejemplo, los controladores de vehículos eléctricos convencionales realizan generalmente el llamado control vectorial. En el control vectorial, un vector de CA que fluye en un motor de C.A. es gestionado y controlado dividiendo el vector de CA en un componente de flujo magnético y un componente de par motor en un sistema de coordenadas giratorio.
Generalmente, una tensión inducida de un motor de C.A. es proporcional a un producto de una velocidad de giro del motor de C.A. y un flujo magnético del mismo. La tensión inducida llega a ser incontrolable cuando excede la tensión máxima que el controlador puede producir. Para asegurar que la tensión inducida no llegue a ser incontrolable, es común realizar un control en los motores de C.A. para debilitar el flujo magnético por debajo de un flujo magnético nominal en un área de alta velocidad. En los controladores de vehículos eléctricos, se realiza despuéS el control para disminuir una pérdida por conmutación en un convertidor de corriente de un dispositivo de control. Es decir, se utiliza un modo de un pulso en el que sólo se realiza la conmutación dos veces en 360 grados en el ángulo eléctrico de una onda fundamental de orden de tensión de CA para producir un tensión de onda rectangular adaptada a una tensión máxima que el dispositivo de control puede producir para un área de alta velocidad. Como se describe en el Documento de patente 1, por ejemplo, se obtiene un valor de orden de flujo magnético secundario mediante una operación aritmética y el valor obtenido es utilizado para el control, de manera que el control del flujo magnético y el control del par motor se consigan de forma estable durante el modo de un pulso.
El Documento de patente 1 describe específicamente una relación de operación entre un valor de orden de flujo magnético , 2*2 y una tensión IVI. Es decir, en un área de velocidad en la que se puede producir un flujo magnético nominal, el valor de orden de flujo magnético se ajusta para que sea una orden de flujo magnético de un valor nominal constante, de manera que la tensión IVI aumente con la velocidad de giro. Cuando la tensión IVI alcanza una tensión máxima de salida controlable, se activa el modo de un pulso. Mientras la tensión se adapta al valor máximo, el valor de orden de flujo magnético es controlado para que sea pequeño según la velocidad de giro por la Ecuación (6) en el Documento de patente 1.
Por otro lado, el Documento de patente 2 describe un método para minimizar una suma total de una pérdida primaria de cobre, una pérdida secundaria de cobre, y una pérdida primaria de hierro de un motor de inducción. En este método, se calcula un valor de orden de flujo magnético con respeto a un valor de orden de par motor y el motor de inducción es controlado en base al valor de orden de flujo magnético calculado.
Documento de patente 1: Solicitud de patente japonesa pública N° H 11-285299 Documento de patente 2: Solicitud de patente japonesa pública N° H7-322700 Literatura no patente 1: "Theor y and Designing Practice of AC Servo System", escrito/editado por Hidehiko SUGIMOTO, Sogo Denshi Publishing.
El documento US5659235 describe un controlador de propulsión para vehículos eléctricos, que permite una reducción de las pérdidas en el motor de inducción incluido y el inversor de la fuente de tensión por correcciones según el estado de carga de la fuente de alimentación del inversor, logrando así el funcionamiento de la unidad de propulsión siempre en el punto de funcionamiento más eficiente y mejorando la eficiencia dentro del rango de capacidad de la unidad de propulsión y la fuente de alimentación. Una unidad correctora del flUjo magnético calcula un valor de corrección del flujo magnético para corregir la orden de flujo magnético según la orden de par motor, y una unidad correctora de la velocidad de giro del flujo magnético calcula un coeficiente para corregir el valor de corrección del flujo magnético según la velocidad de giro del motor de inducción.
El documento US2004012203 describe una posibilidad para ampliar la salida de tensión del inversor aplicando infinitamente muchas porciones de una oscilación armónica de número impar que, después de un análisis de Fourier, proporciona una función rectangular de las tensiones de salida del convertidor. Esta función rectangular suministra el aumento máximo posible de tensión.
El documento JP8322300 describe un controlador de propulsión para la eficiencia máxima de un sistema de propulsión para motores de inducción alimentados por un inversor. La pérdida total del motor y del inversor es expresada por una fórmula que utiliza una orden de par motor, un valor de velocidad y una corriente de excitación. En un calculador de órdenes de corriente se obtiene la corriente de excitación que minimiza la pérdida total en la carga y la velocidad arbitrarias. Se obtiene una corriente del par motor de acuerdo con la corriente de excitación. El control de la corriente se realiza de acuerdo con la corriente de excitación y la corriente del par motor. Las órdenes de corriente de excitación, que se introducen en una unidad de control de corriente, son corregidas por un modelo de flujo magnético o por un flujo magnético estimado por un observador de flujo magnético dimensional mínimo para realizar la respuesta del flujo magnético de alta velocidad. Además, las órdenes de corriente de excitación se suministran a la unidad de control de corriente mediante un limitador para limitar la corriente de salida de un inversor.
DESCRIPCiÓN DE LA INVENCiÓN
PROBLEMA PARA RESOLVER POR LA INVENCiÓN
Sin embargo, el controlador de vehículo eléctrico convencional tiene el problema siguiente. Se da prioridad a la reducción de la pérdida por conmutación de un circuito principal y el modo de un pulso se utiliza agresivamente. Así, se aplica una tensión fija substancialmente constante a un motor de CA sin tomar en consideración un estado verdadero de carga del motor de C.A. Como resultado, el motor de C.A. no se propulsa necesariamente con su eficiencia máxima, reduciendo así la eficiencia máxima de todo el controlador de vehículo eléctrico.
Por otro lado, al priorizar la propulsión en la que la pérdida del motor de CA se minimiza, es necesario ajustar un modo de pulso de un circuito principal en un modo de pulso distinto del modo de un pulso para manipular una amplitud de onda fundamental del valor de orden de tensión. En este caso, es posible seleccionar un modo de tres pulsos, por ejemplo. El problema en este caso es que, en el caso del modo de tres pulsos, la conmutación se realiza seis veces en 360 grados en el ángulo eléctrico. Por lo tanto, en comparación con el modo de un pulso, la pérdida por conmutación del circuito principal aumenta en el modo de tres pulsos.
Cuando se usa como circuito principal un inversor de varios niveles que tiene tres o más niveles de gradación, es posible seleccionar un modo que no sea de un pulso utilizando un inversor de 3 niveles, por ejemplo. En este caso se habilita una modulación de ancho de pulso sin cambiar el cómputo de conmutaciones de una unidad de conmutación que configura el circuito principal. Sin embargo, la dimensión, el peso, el número de componentes y el coste del circuito principal pueden aumentarse, permaneciendo por lo tanto un problema que es que este método no puede ser aplicado a todos los vehículos eléctricos.
Además, incluso en una configuración de un controlador de vehículo eléctrico convencional en el que la tensión de una unidad de fuente de alimentación de C.C. es controlada por una unidad de control del convertidor y un circuito principal del convertidor desde una unidad de fuente de alimentación de CA, la tensión de la unidad de fuente de alimentación de C.C. es controlada básicamente de manera que sea constante, lo que, asimismo después de todo, necesita la aplicación de tensión independientemente del estado de carga real del motor de CA para el motor de CA Esto plantea el problema de que no es posible una propulsión óptimamente eficiente y la eficiencia de todo el controlador de vehículo eléctrico no puede alcanzar... [Seguir leyendo]
Reivindicaciones:
1. Controlador de vehículo eléctrico que incluye un motor de C.A. (1) , el controlador de vehículo eléctrico comprendiendo: un circuito principal (7) configurado para convertir una electricidad de C.C: suministrada por una fuente de alimentación de C.C. en una electricidad de C.A. y suministrar la electricidad de C.A. al motor de C.A. (1) ; una unidad de control vectorial (8) configurada para generar una orden de conmutación para ordenar una operación de conmutación del circuito principal (7) , realizando asi el control vectorial del motor de CA (1) ; una unidad generadora de valores de orden de par motor (10) configurada para generar un valor de orden de par motor que es un valor de orden de un par motor que el motor de C.A. (1) hace que se produzca; y una unidad de cálculo del valor de orden de control vectorial (11 a; 11 c) configurada para calcular, a partir del valor de orden de par motor, un primer valor de orden de flujo magnético para minimizar una pérdida del motor de C.A. (1) , y un segundo valor de orden de flujo magnético, que es un valor de orden de flujo magnético cuando el motor de C.A. (1) es controlado en un modo de un pulso, calcular una primera suma total de pérdidas del motor de C.A. (1) Y las pérdidas del circuito principal (7) cuando el motor de CA (1) es controlado por el primer valor de orden de flujo magnético y una segunda suma total de pérdidas del motor de C.A. (1) Y las pérdidas del circuito principal (7) cuando el motor de C.A. (1) es controlado por el segundo valor de orden de flujo magnético. en donde la unidad de cálculo del valor de orden de control vectorial (11a; 11c) es configurada además para enviar el primer valor de orden de flujo magnético a la unidad de control vectorial (8) cuando la primera suma total es inferior a la segunda suma total, y enviar el segundo valor de orden de flujo magnético a la unidad de control vectorial (8) cuando la primera suma total es igualo superior a la segunda suma total.
2. Controlador de vehiculo eléctrico según la reivindicación 1. en donde la unidad de cálculo del valor de orden de control vectorial (11a; 11b) calcula un valor de orden de flujo magnético cuando el motor de C.A. (1) es controlado en un modo de un pulso y envía el valor de orden de flujo magnético calculado a la unidad de control vectorial (8) .
3. Controlador de vehículo eléctrico según la reivindicación 1, que comprende: un circuito del convertidor de C.A. a C.C. configurado para convertir una energia de C.A. suministrada desde una fuente de alimentación de C.A. en una electricidad de C.C.; una unidad de control del convertidor (6) configurada para generar una orden de conmutación para ordenar una operación de conmutación del circuito del convertidor de CA a C.C. (5) ; una unidad de fuente de alimentación de C.C. (3a) a la que se introduce una electricidad de C.C. enviada desde el circuito principal del convertidor de C.A. a C.C .. en donde la unidad de fuente de alimentación de C.C. (3a) es la fuente de alimentación de C.C.; y una unidad detectora de tensión de C.C. que detecta un tensión de la unidad de fuente de alimentación de C.C. (3a) , en donde la unidad de cálculo del valor de orden de control vectorial (11a) es configurada además para:
calcular una amplitud de tensión terminal del motor de CA (1) cuando el motor de C.A. (1) es controlado por el primer valor de orden de flujo magnético, establecer un valor de límite inferior que es decidido anteriormente por una característica del circuito del convertidor de C.A. a C.C. (5) y que está relacionado a una tensión aplicada de la unidad de fuente de alimentación de C.C. (3a) a un valor de orden de tensión de C.C. para ordenar la tensión de la unidad de fuente de alimentación de C.C. (3a) , y enviar el valor de orden de tensión de C.C. a la unidad de control vectorial (8) .
4. Controlador de vehiculo eléctrico según la reivindicación 1, en donde la unidad generadora de valores de orden de par motor (10) es configurada para generar un valor de orden de limitación recibido de una unidad de operación operada por un conductor del vehículo eléctrico, la unidad de cálculo del valor de orden de control vectorial (11a) incluyendo una tabla registrada con un valor de orden de flujo magnético correspondiente a una suma total de pérdidas más pequeñas, anteriormente calculada. según el valor de orden de limitación, y la unidad de cálculo del valor de orden de control vectorial (11a) selecciona de la tabla, según el valor de orden de limitación, un valor de orden de flujo magnético para enviarlo a la unidad de control vectorial (8) .
5. Controlador de vehículo eléctrico que incluye un motor de CA (1) , el controlador de vehiculo eléctrico
comprendiendo: un primer circuito principal (5) configurado para convertir una energía de C.A. suministrada desde una fuente de alimentación de C.A. en una electricidad de C.C.; una unidad de control del convertidor (6) configurada para generar una orden de conmutación para ordenar una operación de conmutación del primer circuito principal (5) ; una unidad de fuente de alimentación de C.C. (3a) configurada para recibir una electricidad de C.C. del primer circuito principal (5) ;
una unidad detectora de tensión de C.C. configurada para detectar un tensión de la unidad de fuente de alimentación de C.C. (3a) ; un segundo circuito principal (7) configurado para convertir una electricidad de C.C: enviada desde la unidad de fuente de alimentación de C.C. (3a) en una electricidad de C.A. y suministrar la electricidad de C.A. al motor de CA (1) ; una unidad de control vectorial (8) configurada para generar una orden de conmutación para ordenar una operación de conmutación del segundo circuito principal (7) , realizando así el control vectorial del motor de C.A.
(1) ;
una unidad generadora de valores de orden de par motor (10) configurada para generar un valor de orden de limitación recibido de una unidad de operación de un conductor del vehículo eléctrico y un valor de orden de par motor que es un valor de orden de un par motor que se hace que el motor de C.A. (1) produzca; y una unidad de cálculo del valor de orden de control vectorial (11a) que incluye una tabla registrada con un valor de orden de tensión de C.C. que se utiliza para ordenar la tensión de la unidad de fuente de alimentación de C.C.
(3a) y que es calculado anteriormente, según el valor de orden de limitación, en base a una amplitud de tensión terminal del motor de CA (1) cuando es controlado por un valor de orden de flujo magnético para que se minimice una pérdida del motor de C.A. (1) Y un valor de limite superior y un valor de límite inferior que son decididos anteriormente por una característica del primer circuito principal (5) y que se relacionan a una tensión aplicada de la unidad de fuente de alimentación de C.C. (3a) , y envía el valor de orden de tensión de C.C. a la unidad de control del convertidor (6) , en donde la amplitud de la tensión terminal del motor de C.A. (1) es calculada a partir del valor de orden de par motor, y la unidad de cálculo del valor de orden de control vectorial (11a) selecciona, según el valor de orden de limitación, el valor de orden de tensión de C.C. que debe enviarse a la unidad de control del convertidor (6) a partir de la tabla.
6. Controlador de vehículo eléctrico según cualquiera de las reivindicaciones 1, 3 a 4 y 6, en donde las características del primer circuito principal (5) incluye una condición de tensión de la fuente de alimentación de C.A. y una configuración de circuito del primer circuito principal (5) , y una propiedad aislante y una propiedad de tensión no disruptiva del primer circuito principal (5) .
FIG.1
.
, "
1
r---.l---
··• : , I I
I
·I
I
·•
•
·I
·
L
·
FM
FIG.2
PÉRDIDA DEL MOTOR DE INDUCCiÓN IWl DE UN PULSO (VALOR
*: CONDICiÓN DE PÉRDIDA MíNIMA
DEL LÍMITE SUPERIOR
(CONDICiÓN DE MÁXIMA EFICIENCIA)
DEL FLUJO MAGNÉTICO
FIG.3
LíMITE SUPERIOR: f6 . EFe mlJX
TENSiÓN DE SALIDA DEL SEGUNDO CIRCUITO PRINCIPAL (UNIDAD DE
CONTROL VECTORIAL) lÍMITE INFERIOR: J6 . EFe min lf
"
VELOCIDAD
(1) : AMPLITUD DEL VALOR DE ORDEN DE TENSiÓN M ( .J6 .EFe DURANTE EL MODO DE UN PULSO)
r SEGÚN EL SISTEMA DEL DOCUMENTO DE PATENTE 1
(2) : AMPLITUD DEL VALOR DE ORDEN DE TENSiÓN fVI2 DURANTE LA CONDICiÓN DE MÁXIMA EFICIENCIA DEL MOTOR DE INDUCCiÓN
FIG.4
11a , )
.
t---------------~---~·------------------------------·-----.... . -21
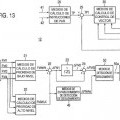
, > 23a VALOR DE TENSI DEC.C. EFC ORDEN DE PAR MOTOR 1" FRECUENCIA DE ROTACiÓN FM
,
- --------~---------------------~--------------------------._------_.·
FIG.5
11a , J
, . ------------------------------------------------------. -~-------1
, : 25
, , , •• l ORDEN DE LIMITACiÓN Ne •
·••, '"
FRECUENCIA DE ROTACiÓN FM · , •
·
, • , o · , o ·
·
·
?
· , o · · , •
o· ·o o .•..
, •o ·
:
·
·
·
·
!EFCR
· --"
·
·
·
·o ·
·
·
·
·
·o ·o · • o ·•
·
:F2R...;.
•,
-
i
•
t__________________._________________________•__________________._..
• ·.• o
FIG.6
11b
" "
r-·--------------------------------------------------------~-------;
¡
·
VALOR DE TENSIÓN , •
·
, DE C.C. EFC
ORDEN DE PAR MOTOR T• FRECUENCIA DE ROTACiÓN FM
21 ;
F2R1
.., .
, · , I
•
- ~-------------~---------------------------_..
, :
· · , I
·
·
:F2R
FIG.7
3b
, , .'
. --_..._---"
•I 7
1 · •I
· ·•
·•
•
I
•L _ _ _______
. FM
FIG.8
11c
_________ •_____ . ______________________ ______________ __ .J.. i ______.
.~
"
VALOR DE TENSIÓ DE C.C. EFC
ORDEN DE PAR MOTOR T*:
FRECUENCIA DE ROTACiÓN FM
- -----._----------------------------------~-._----------
21 :, ·1
2J~ ·
1 1
· , 1
, , , , ·
·
·
· : , 1
·
·
, ·1
!F2R
7' 1
· , I 1
•I
•I
, ·1
, •
·!·
•1 1
·1
·
, ·
·
•
.
- --------_!
FIG.9-1
TENSiÓN DE ONDA RECTANGULAR
ONDA FUNDAMENTAL DE ORDEN DE TENSiÓN DE C.A.
FIG.9-2 ·
FIG.9-3
Patentes similares o relacionadas:
Sistema y un método de alimentación de energía eléctrica a un consumidor de la misma, del 11 de Marzo de 2020, de BOMBARDIER TRANSPORTATION GMBH: Un sistema para suministrar energía eléctrica a un primer consumidor de energía eléctrica, cuyo sistema comprende: • un filtro […]
Dispositivo para un vehículo ferroviario accionado de forma eléctrica, del 8 de Mayo de 2019, de Siemens Mobility GmbH: Dispositivo para un vehículo ferroviario accionado eléctricamente, con una disposición de conmutación que puede conectarse a una unidad de tracción […]
Dispositivo de control y procedimiento de control correspondiente para un convertidor elevador en un sistema de accionamiento de un motor, del 27 de Diciembre de 2017, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de accionamiento de un motor eléctrico con un dispositivo de control de un convertidor elevador , dicho convertidor de elevador […]
 Vehículo, del 1 de Agosto de 2012, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Vehículo que comprende:
una primera unidad de accionamiento accionada por una primera fuente de energía;
una primera unidad de […]
Vehículo, del 1 de Agosto de 2012, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Vehículo que comprende:
una primera unidad de accionamiento accionada por una primera fuente de energía;
una primera unidad de […]
 VEHÍCULO CON TRACCIÓN POR BATERÍA Y PROCEDIMIENTO PARA HACER FUNCIONAR UN VEHÍCULO DE ESTE TIPO, del 28 de Febrero de 2011, de ELIN EBG TRACTION GMBH: Vehículo con un accionamiento eléctrico , que es alimentado desde una red de alimentación eléctrica externa, por ejemplo una red de 600 V, y al menos una batería , por […]
VEHÍCULO CON TRACCIÓN POR BATERÍA Y PROCEDIMIENTO PARA HACER FUNCIONAR UN VEHÍCULO DE ESTE TIPO, del 28 de Febrero de 2011, de ELIN EBG TRACTION GMBH: Vehículo con un accionamiento eléctrico , que es alimentado desde una red de alimentación eléctrica externa, por ejemplo una red de 600 V, y al menos una batería , por […]
PROCEDIMIENTO PARA LA OBTENCION DE VITAMINA B6., del 16 de Marzo de 2007, de SWISS REINSURANCE COMPANY: Un mutante de un microorganismo recombinante del género Sinorhizobium, capaz de producir vitamina B6, el cual contiene un plásmido recombinante […]
CONTROLADOR DE VEHÍCULO ELÉCTRICO, del 16 de Febrero de 2012, de MITSUBISHI DENKI KABUSHIKI KAISHA: Un aparato de control de coche eléctrico para accionar un motor de inducción por medio de corriente eléctrica suministrada mediante cableado aéreo , que […]
 DISPOSITIVO DE CONTROL DE VEHÍCULO ELÉCTRICO, del 20 de Junio de 2011, de MITSUBISHI DENKI K. K.: Un controlador de vehículo eléctrico para la detección de velocidades de eje de los ejes correspondientes a una pluralidad de motores eléctricos de CA controlados por […]
DISPOSITIVO DE CONTROL DE VEHÍCULO ELÉCTRICO, del 20 de Junio de 2011, de MITSUBISHI DENKI K. K.: Un controlador de vehículo eléctrico para la detección de velocidades de eje de los ejes correspondientes a una pluralidad de motores eléctricos de CA controlados por […]