Control de seguridad de transportador.
Un método para controlar la función de seguridad de un transportador,
que comprende: proporcionar unas señales desde una pluralidad de sensores (10; 18; 26, 28, 30, 32) dispuestos en relación con el transportador en un sistema informático (34, 36); hacer funcionar el transportador en un modo de aprendizaje; durante el funcionamiento en modo de aprendizaje, determinar en el sistema informático la relación entre las señales de salida de sensores y una lógica almacenada de antemano en el sistema informático que describe la geometría física de los posibles tipos de transportadores y sus características de funcionamiento permisibles y determinar la relación entre las señales de salidas de sensores para establecer la integridad de seguridad de los sensores, y almacenar patrones de señales de sensores como un patrón de referencia; y posteriormente funcionar el transportador en un modo de ejecución en el que se supervisan las funciones de seguridad; y, durante el modo de ejecución, comparar en el sistema informático el patrón de señales de sensores con el patrón de referencia y con la lógica almacenados de antemano para establecer la integridad de seguridad de los sensores, del sistema informático y del funcionamiento del transportador.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/002874.
Solicitante: OTIS ELEVATOR COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 10 FARM SPRINGS FARMINGTON, CT 06032 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SENGER,ALOIS, KAMENICKY,BERNARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B29/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › Dispositivos de seguridad de las escaleras o pasillos mecánicos.
PDF original: ES-2420779_T3.pdf
Fragmento de la descripción:
Control de seguridad de transportador
Esta invención está relacionada con mejoras en el control de seguridad de aparatos de transporte, y tiene aplicación particular, aunque no exclusiva, en los transportadores de pasajeros, tales como escaleras mecánicas, andenes móviles y aceras.
Los transportadores conocidos por motivos de seguridad están equipados convencionalmente con una serie de sensores, típicamente interruptores, para detectar determinados eventos peligrosos, tales como un objeto extraño que entra en una entrada de pasamanos o un peine de salida, y se dispone un circuito de control para adoptar las acciones apropiadas, típicamente detener el transportador, cuando el evento específico es detectado por el sensor. Usualmente estos sensores están dedicados a una sola función de seguridad. Los sensores pueden cablearse individualmente de vuelta al controlador, o pueden comunicarse a través de una disposición de bus común. Convencionalmente, se conectan conmutadores normalmente cerrados en serie para formar una llamada "cadena de seguridad", de tal manera que cuando se abre cualquier interruptor la cadena se rompe y se asegura la respuesta de seguridad apropiada.
El documento US 6666319 B2 describe un dispositivo para supervisar la presencia de escalones y palés de una escalera mecánica o andén móvil, de tal manera los escalones o las paletas ausentes se detectan de forma inmediata, de modo que se detendrá el accionamiento antes de que la pieza defectuosa o ausente llegue a la zona visible de la escalera mecánica o andén móvil.
Por lo general, el uso de ordenadores programados en tales funciones de seguridad ha sido limitado, pero el uso de ordenadores puede traer muchas ventajas conocidas, tales como ahorro en costes y mejora de la supervisión, gestión y control.
Un objetivo de la invención es proporcionar controles de seguridad que utilizan ordenadores que proporcionan una funcionalidad mejorada con un alto nivel de integridad de seguridad.
Según la invención, se proporciona un método para controlar la función de seguridad de un transportador, que comprende: proporcionar unas señales desde una pluralidad de sensores dispuestos en relación con el transportador en un sistema informático; hacer funcionar el transportador en un modo de aprendizaje; durante el funcionamiento en modo de aprendizaje, determinar en el sistema informático la relación entre las señales de salidas de sensores y una lógica almacenada de antemano en el sistema informático que describe la geometría física de los posibles tipos de transportadores y sus características de funcionamiento permisibles y determinar la relación entre las señales de salidas de sensores para establecer la integridad de seguridad de los sensores, y almacenar patrones de señales de sensores como un patrón de referencia; y posteriormente hacer funcionar el transportador en un modo de ejecución en la que se supervisan las funciones de seguridad; y, durante el modo de ejecución, comparar en el ordenador el patrón de señales de sensores con el patrón de referencia y la lógica almacenados de antemano para establecer la integridad de seguridad de los sensores, del sistema informático y del funcionamiento del transportador.
La invención, por lo menos en sus formas preferidas, puede proporcionar, mediante supervisión de la integridad de seguridad, la necesaria seguridad de un transportador sin depender de valores absolutos de salidas de sensores y su comparación con valores fijos. De ese modo se puede asegurar la seguridad de un sistema transportador complejo, incluso en el caso de que se hagan algunos cambios en el transportador.
Una distinción sobre procesos previos es que si no se ha establecido la integridad de seguridad, se puede realizar una acción relacionada con la seguridad, tal como detener el transportador, pese a que podría no existir una salida de sensor que de por sí indica una condición de fallo. Esto lleva claramente a un aumento en la seguridad global del funcionamiento.
Ahora se describirán unas realizaciones de la invención a modo de ejemplo y haciendo referencia a los dibujos que se acompañan, en los que:
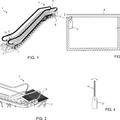
La Figura 1 es un diagrama conceptual de un control de seguridad en escaleras mecánicas de la técnica anterior;
La Figura 2 es un diagrama similar al de la Figura 1 que ilustra algunos aspectos novedosos de la invención;
La Figura 3 ilustra una posible disposición de sensores en una escalera mecánica según la invención;
La Figura 4 ilustra un patrón físico en el sistema detectado por los sensores;
La Figura 5 muestra un patrón de señal de los sensores que detectan el patrón físico; La Figura 6 muestra una posible implementación de equipo físico de la invención;
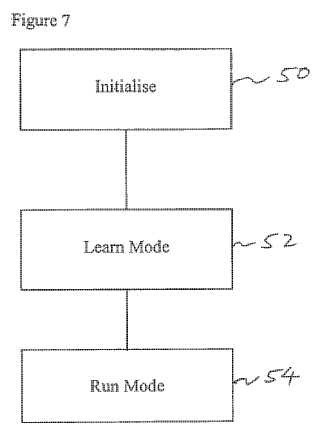
La Figura 7 muestra un diagrama de flujo de alto nivel de un proceso de control de seguridad según la invención; y La Figura 8 es un diagrama de flujo más detallado.
Haciendo referencia a la Figura 1, se muestra un sistema de seguridad convencional en el que cada sensor se dirige a detectar y proteger contra una sola condición de fallo. Una serie de detectores de sensor 10 se despliegan cuando es necesario detectar fallos y situaciones peligrosas. El sistema de seguridad consiste básicamente en tres elementos: sensores 10, tales como palancas, rampas, contactos deslizantes o barreras de luz, fotosensores, CCD, sensores de efecto hall, etc.; un dispositivo intérprete/analizador 12 que interpreta la salida del respectivo sensor 10 y por ejemplo abre o cierra o interrumpe una salida, sobre la base de la señal del sensor; y un ejecutor 14, que realiza una acción, sobre la base del estado de los intérpretes. Usualmente las salidas de los intérpretes están conectadas en serie para formar una cadena de seguridad, lo que lleva al sistema a un modo a prueba de fallos, y por lo general este es la detención de la máquina. Cada combinación de sensor/intérprete que incluye la interrupción de la cadena de seguridad tiene que proporcionar la integridad de seguridad necesaria para la función dedicada. No se puede observar cualquier cambio en la integridad de seguridad durante la vida útil de los componentes.
La Figura 2 ilustra aspectos de la presente invención. En particular varias funciones de seguridad con diferentes requisitos relacionados con el nivel de seguridad son interpretadas por un intérprete común. Cada sensor no está directamente relacionado con una sola función de seguridad; por otra parte un sensor puede proporcionar un estado de la información. Por otra parte, la integridad del sensor no es un requisito para la integridad de una sola función de seguridad. Esta información se combina con el estado de la información de uno o varios de los otros sensores. La combinación de patrones de información se interpreta como patrones de información seguros o no seguros por comparación con un patrón de información de referencia, así como por comparación con una relación lógica que se define en el ordenador. Cada uno de los patrones de referencia pueden tener tolerancias limitadas, y dentro de esas tolerancias el patrón del sensor medido puede interpretarse como estado seguro o no seguro. La comparación de las señales recibidas y procesadas se puede utilizar para evaluar la integridad de los sensores, la unidad de procesamiento (ordenador) , así como el patrón recibido del modo de aprendizaje. De esta manera puede observarse continuamente la integridad de los sensores y unidad de procesamiento.
Aquí el sistema de seguridad consiste básicamente en tres elementos: sensores 18, intérpretes 20, que combinan, comparan y diferencian las señales recibidas de sensores y derivan de ellas un resultado; y el ejecutor 22, que lleva a cabo una acción, sobre la base del estado de los intérpretes. De nuevo usualmente los resultados de los intérpretes se considera que están en serie, o se combinan con éxito utilizando combinaciones de lógica redundante Y (AND) , que lleva el sistema a un modo seguro. Usualmente, esto es la detención de la máquina, si el ejecutor determina que no existe una situación de seguridad.
Se puede observar que los intérpretes 20 pueden recibir la salida de más de un sensor. Esto permite realizar comprobaciones de seguridad más amplias. Según un aspecto importante de la invención, los intérpretes 20 pueden realizar más de una función de seguridad basándose en la salida de más de un sensor. En el ejemplo que se describe a continuación, pueden utilizarse tres sensores para proteger contra una velocidad excesiva, un escalón ausente, una cadena estirada y un movimiento hacia atrás, por ejemplo.
Según otro aspecto, los intérpretes 20 pueden comparar un patrón de salidas de sensores con un patrón... [Seguir leyendo]
Reivindicaciones:
1. Un método para controlar la función de seguridad de un transportador, que comprende: proporcionar unas señales desde una pluralidad de sensores (10; 18; 26, 28, 30, 32) dispuestos en relación con el transportador en un sistema informático (34, 36) ; hacer funcionar el transportador en un modo de aprendizaje; durante el funcionamiento en modo de aprendizaje, determinar en el sistema informático la relación entre las señales de salida de sensores y una lógica almacenada de antemano en el sistema informático que describe la geometría física de los posibles tipos de transportadores y sus características de funcionamiento permisibles y determinar la relación entre las señales de salidas de sensores para establecer la integridad de seguridad de los sensores, y almacenar patrones de señales de sensores como un patrón de referencia; y posteriormente funcionar el transportador en un modo de ejecución en el que se supervisan las funciones de seguridad; y, durante el modo de ejecución, comparar en el sistema informático el patrón de señales de sensores con el patrón de referencia y con la lógica almacenados de antemano para establecer la integridad de seguridad de los sensores, del sistema informático y del funcionamiento del transportador.
2. Un método para controlar la función de seguridad de un transportador según la reivindicación 1, que comprende, durante el modo de ejecución, comparar varias veces el patrón de las señales de sensores con el patrón de referencia y la lógica almacenados de antemano, para supervisar la integridad de seguridad de los sensores, del sistema informático y del funcionamiento del transportador.
3. Un método según la reivindicación 1 o 2 en donde, durante el modo de aprendizaje, cada patrón de señal de sensor se compara con los otros para asegurar la necesaria integridad de seguridad de la señal de sensor y de una unidad de procesamiento de un sistema informático.
4. Un método según la reivindicación 1, 2 o 3 que comprende establecer valores de umbral para proporcionar variaciones admisibles para el funcionamiento seguro del transportador, y determinar que se ha superado una prueba cuando la relación entre las señales, o valores calculados basados en las mismas, no se desvían más del valor de umbral.
5. Un método según la reivindicación 1, 2, 3 o 4 que comprende realizar una actuación relacionada con la seguridad si no se ha establecido la integridad de seguridad, cuando no hay salida de sensor que indique o que sea de por sí una condición de fallo.
6. Un método según la reivindicación 1, 2, 3, 4 o 5 en donde el transportador es una escalera mecánica.
7. Un método según cualquier reivindicación anterior en donde hay por lo menos un sensor de escalón, por lo menos un sensor (32) de pasamanos y por lo menos un sensor de velocidad.
8. Un método según la reivindicación 7 en donde hay por lo menos dos sensores de escalón, por lo menos dos sensores de pasamanos y por lo menos un sensor de velocidad.
9. Un método según la reivindicación 8 en donde sobre la base de la secuencia de las salidas de los sensores de escalón puestas en correlación con la salida del sensor de velocidad se llega a una conclusión acerca del correcto funcionamiento de los sensores de escalón.
10. Un método según la reivindicación 7, 8 o 9 en donde sobre la base de la secuencia de la salida de por lo menos un sensor de escalón puesto en correlación con la salida del sensor de velocidad y un sensor de pasamanos se llega a una conclusión acerca del correcto funcionamiento de cada sensor.
11. Un método según la reivindicación 8 o 9 en donde sobre la base de la secuencia de las salidas de los sensores de escalón se llega a una conclusión acerca del sentido de movimiento y la integridad del sentido identificado.
12. Un método según cualquiera de las reivindicaciones 7 a 11 en donde sobre la base de las salidas de señal del sensor (es) de escalón se llega a una conclusión acerca de la existencia de escalones.
13.Un método según la reivindicación 8, 9 o 11 en donde sobre la base de la correlación de la salida del sensor de velocidad y la relación de tiempos de las salidas de los sensores de escalón se llega a una conclusión acerca del alargamiento y la reducción de la cadena de escalones de la escalera mecánica.
14. Un método según cualquiera de las reivindicaciones 7 a 13 en donde sobre la base de información de velocidad del sensor se detecta excesiva velocidad del transportador.
15. Un método según cualquiera de las reivindicaciones 7 a 14 en donde se puede detectar una diferencia de velocidad de escalón y velocidad de pasamanos y además se pueden adoptar medidas de seguridad.
Patentes similares o relacionadas:
 Sistema de escalera mecánica, del 29 de Julio de 2020, de KONE CORPORATION: Un sistema de escalera mecánica , configurado para:
accionar una escalera mecánica en respuesta a una señal recibida desde una interfaz de usuario situada […]
Sistema de escalera mecánica, del 29 de Julio de 2020, de KONE CORPORATION: Un sistema de escalera mecánica , configurado para:
accionar una escalera mecánica en respuesta a una señal recibida desde una interfaz de usuario situada […]
Un sistema de escalera mecánica, del 17 de Junio de 2020, de KONE CORPORATION: Un sistema de escalera mecánica que comprende: un foso en al menos un primer o un segundo extremo de la escalera mecánica, dicho foso […]
Escalera mecánica o acera móvil que comprende un botón de emergencia, del 3 de Junio de 2020, de KONE CORPORATION: Escalera mecánica o acera móvil que comprende un botón de emergencia, en la que: dicho botón de emergencia comprende un cuerpo principal de […]
Instalación de transporte de personas con dispositivo de supervisión y de marcación para marcar unidades de marcha dañadas, del 26 de Febrero de 2020, de INVENTIO AG: Instalación de transporte de personas , que presenta: varias unidades de paso ; una placa de peine ; una instalación de supervisión ; […]
Sistema de control de seguridad de un ascensor, escalera mecánica o andén móvil, del 1 de Mayo de 2019, de ORONA, S. COOP.: Sistema de control de seguridad de un ascensor, escalera mecánica o andén móvil, que incluye unos medios de accionamiento, donde el sistema […]
Instalación para el transporte de personas con sistema de control, del 14 de Diciembre de 2017, de THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A: Instalación para el transporte de personas con sistema de control. La presente invención se refiere a una instalación para el transporte de personas , en especial una […]
Dispositivo de fijación para fijar una plataforma de carga en un medio de tracción, del 5 de Abril de 2017, de INVENTIO AG: Cinta de plataformas de un pasillo rodante con plataformas dispuestas unas detrás de las otras en la dirección del movimiento, que […]
Sistema de seguridad para pasarela móvil, del 29 de Marzo de 2017, de Kerett Electronic Services Ltd: Un sistema de seguridad para una pasarela móvil que tiene un circuito continuo de pasos accionado por un sistema de accionamiento y un detector de pasos faltantes […]