CONTROL DE LA ASPIRACION POR MEDIO DE FLUJO O DE IMPEDANCIA.
Aparato para controlar la aspiración en un sistema microquirúrgico (10),
que comprende:
una fuente de gas presurizado (12);
un generador de vacío (22) acoplado de manera fluida a dicha fuente de gas presurizado (12);
una cámara de aspiración (26) acoplada de manera fluida a dicha fuente de gas presurizado (12) y a dicho generador de vacío (22);
un sensor de nivel de fluido (28) acoplado de manera funcional a dicha cámara de aspiración (26);
una bomba (30) acoplada de manera fluida a dicha cámara de aspiración (26);
un controlador proporcional (40); y
un ordenador (38) eléctricamente acoplado a dicho sensor de nivel de fluido (28), dicha bomba (30) y dicho controlador proporcional (40);
en el que, tras la selección de un caudal de succión deseado para dicha cámara de aspiración a través de dicho controlador proporcional, dicho sensor de nivel de fluido (28) determina un nivel de fluido real en dicha cámara de aspiración (26) y proporciona una señal correspondiente a dicho nivel de fluido determinado a dicho ordenador (38), y dicho ordenador (38) calcula un caudal de succión en respuesta a dicho nivel de fluido determinado y utiliza dicho caudal de succión calculado para detectar una oclusión
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/005956.
Solicitante: ALCON, INC.
Nacionalidad solicitante: Suiza.
Dirección: P.O. BOX 62 BOSCH 69,6331 HUNENBERG.
Inventor/es: HUCULAK, JOHN, C., NAZARIFAR, NADER, TODD, KIRK, W., GAO,SHAWN X, HOPKINS,MARK,ALAN, THOMAS,ROGER,D.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Junio de 2010.
Clasificación PCT:
- A61M1/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › Dispositivos de succión o de bombeo de uso médico; Dispositivos para extraer, tratar o transportar los líquidos del cuerpo; Sistemas de drenaje (catéteres A61M 25/00; conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; dispositivos para tomar muestras sanguíneas A61B 5/15; instrumentos para retirar la saliva para dentistas A61C 17/06; filtros para implantar en los vasos sanguíneos A61F 2/01).
Fragmento de la descripción:
Control de la aspiración por medio de flujo o de impedancia.
Campo de la invención
La presente invención se refiere en general al control de la aspiración en sistemas microquirúrgicos y, más particularmente, al control de la aspiración en sistemas microquirúrgicos oftálmicos.
Descripción de la técnica relacionada
Durante la cirugía de incisión pequeña y, particularmente, durante la cirugía oftálmica, se insertan sondas pequeñas en el lugar operativo para cortar, retirar o manipular de otra forma el tejido. Durante estas intervenciones quirúrgicas, se infunde típicamente fluido en el ojo y el fluido de infusión y el tejido se aspiran desde el lugar quirúrgico. Condiciones quirúrgicas y objetivos quirúrgicos variables pueden llevar a cantidades de esfuerzo variables requeridas para retirar el tejido y el fluido con efectividad y seguridad.
Los tipos de sistemas de aspiración utilizados antes de la presente invención se caracterizaban generalmente por ser controlados en flujo o controlados en vacío dependiendo del tipo de bomba utilizada en el sistema. Cada tipo de sistema tiene ciertas ventajas. El documento WO 93/18802, por ejemplo, describe un sistema de control que puede utilizarse en un sistema de aspiración controlado en flujo o en un sistema de aspiración controlado en vacío.
Los sistemas de aspiración controlados en vacío son hechos funcionar estableciendo un nivel de vacío deseado que el sistema busca mantener. El caudal depende de la presión intraocular, el nivel de vacío y la resistencia al flujo en la trayectoria de fluido. La información de caudal real no está disponible. Los sistemas de aspiración controlados en vacío utilizan típicamente una bomba venturí o de diafragma. Los sistemas de aspiración controlados en vacío ofrecen las ventajas de tiempos de respuesta rápidos, control de niveles de vacío decrecientes y buenas prestaciones fluídicas mientras se aspira aire, tal como durante una intervención de intercambio de aire/fluido. Los inconvenientes de dichos sistemas son la falta de información de flujo, lo que da como resultado altos flujos transitorios durante la facoemulsificación o fragmentación, unido a una falta de detección de oclusión. Los sistemas controlados en vacío son difíciles de hacer funcionar en un modo controlado en flujo debido a los problemas de medición no invasiva de flujo en tiempo real.
Los sistemas de aspiración controlados en flujo se hacen funcionar estableciendo un caudal de aspiración deseado para que lo mantenga el sistema. Los sistemas de aspiración controlados en flujo utilizan típicamente una bomba peristáltica, de caracol o de paletas. Los sistemas de aspiración controlados en flujo ofrecen las ventajas de caudales estables y niveles de vacío automáticamente crecientes bajo oclusión. Los inconvenientes de dichos sistemas son tiempos de respuesta relativamente lentos y respuestas a rotura de oclusión indeseadas cuando se utilizan grandes componentes dóciles, y el vacío no puede reducirse linealmente durante una oclusión de la punta. Los sistemas controlados en flujo son difíciles de hacer funcionar en un modo controlado en vacío debido a que los retardos de tiempo en la medición del vacío pueden provocar inestabilidad en el bucle de control, reduciendo las prestaciones dinámicas.
Un sistema quirúrgico oftálmico actualmente disponible, el sistema MBLLENIUM de Storz Instrument Company, contiene tanto un sistema de aspiración controlado en vacío (que utiliza una bomba venturi) como un sistema de aspiración controlado en flujo independiente (que utiliza una bomba de caracol). Las dos bombas no pueden utilizarse simultáneamente, y cada bomba requiere un tubo y un cartucho de aspiración independientes.
Otro sistema quirúrgico oftálmico actualmente disponible, el sistema ACCURUS® de Alcon Laboratories, Inc., contiene tanto una bomba venturi como una bomba peristáltica que funcionan en serie. La bomba venturi aspira material desde el lugar quirúrgico hasta una pequeña cámara de recogida. La bomba peristáltica bombea el material aspirado desde la cámara de recogida pequeña hasta una bolsa de recogida mayor. La bomba peristáltica no proporciona vacío de aspiración al lugar quirúrgico. Así, el sistema funciona como un sistema controlado en vacío.
En consecuencia, continúa existiendo la necesidad de proporcionar un procedimiento mejorado de retirar de forma efectiva y segura tejido y fluido aspirados en un sistema microquirúrgico.
Sumario de la invención
La presente invención se refiere al control de la aspiración en un sistema microquirúrgico. Se crea un caudal de succión deseado en una cámara de aspiración utilizando una fuente de gas presurizado, un generador de vacío y una bomba. Se aspira fluido desde un dispositivo quirúrgico hasta la cámara de aspiración. Se determina un nivel real del fluido en la cámara de aspiración.
Según la presente invención, se proporciona un sistema como el definido en la reivindicación 1, en el que se calcula un caudal de succión en respuesta al nivel real de fluido. Se vigila un cambio en el caudal de succión para detectar una oclusión.
En otro aspecto de la presente invención, se calcula una impedancia de succión en respuesta al caudal de succión. Se vigila un cambio en la impedancia de succión para detectar una oclusión.
Breve descripción de los dibujos
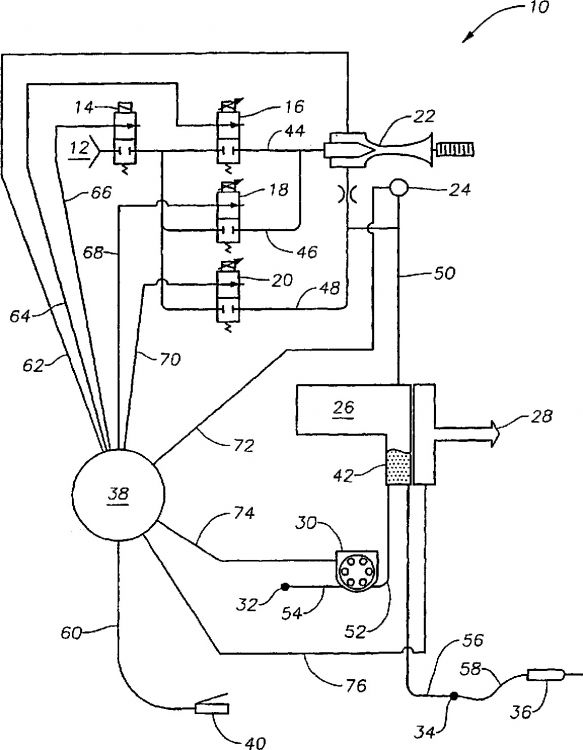
Para una comprensión más completa de la presente invención y para objetos y ventajas adicionales de la misma, se hace referencia a la siguiente descripción tomada junto con el dibujo que se acompaña, en el que la figura 1 es un diagrama esquemático que ilustra el control de aspiración en un sistema microquirúrgico.
Descripción detallada de las formas de realización preferidas
La forma de realización preferida de la presente invención y sus ventajas se entienden mejor haciendo referencia a la figura 1 de los dibujos. Un sistema microquirúrgico 10 incluye una fuente de gas presurizado 12, una válvula de aislamiento 14, una válvula proporcional de vacío 16, una segunda válvula proporcional de vacío opcional 18, una válvula proporcional de presión 20, un generador de vacío 22, un transductor de presión 24, una cámara de aspiración 26, un sensor de nivel de fluido 28, una bomba 30, una bolsa de recogida 32, una lumbrera de aspiración 34, un dispositivo quirúrgico 36, un ordenador o microprocesador 38 y un dispositivo de control proporcional 40. Los diversos componentes del sistema 10 están acoplados en materia de fluido por medio de conductos de fluido 44, 46, 48, 50, 52, 54, 56 y 58. Los diversos componentes del sistema 10 están acoplados eléctricamente por medio de interfaces 60, 62, 64, 66, 68, 70, 72, 74 y 76. La válvula 14 es preferentemente una válvula de solenoide de "conexión/desconexión". Las válvulas 16-20 son preferentemente válvulas de solenoide proporcionales. El generador de vacío 22 puede ser cualquier dispositivo adecuado para generar vacío, pero es preferentemente un chip de vacío o un chip venturi que genera vacío cuando la válvula de aislamiento 14 y las válvulas proporcionales de vacío 16 y/o 18 están abiertas y se hace pasar gas desde la fuente de gas presurizado 12 a través del generador de vacío 22. El transductor de presión 24 puede ser cualquier dispositivo adecuado para medir directa o indirectamente la presión y el vacío. El sensor de nivel de fluido 28 puede ser cualquier dispositivo adecuado para medir el nivel de un fluido 42 dentro de la cámara de aspiración 26, pero es preferentemente capaz de medir niveles de fluido de una manera continua. La bomba 30 puede ser cualquier dispositivo adecuado para generar vacío, pero es preferentemente una bomba peristáltica, una bomba de caracol o una bomba de paletas. El microprocesador 38 es capaz de implementar control de realimentación y, preferentemente, control PID. El controlador proporcional 40 puede ser cualquier dispositivo adecuado para controlar proporcionalmente el sistema 10 y/o el dispositivo quirúrgico 36, pero es preferentemente un controlador de pedal.
El sistema 10 utiliza preferentemente tres procedimientos diferentes para controlar la aspiración, el control de vacío, el control de succión y el control de flujo. En el modo de control de vacío, el microprocesador 38 activa la válvula de aislamiento 14 por medio de la interfaz 66 y mantiene la válvula de presión 20 en un estado cerrado por medio de la interfaz 70. El controlador proporcional 40 y el microprocesador 38 se utilizan para abrir o cerrar proporcionalmente la válvula proporcional 16 (y opcionalmente la...
Reivindicaciones:
1. Aparato para controlar la aspiración en un sistema microquirúrgico (10), que comprende:
una fuente de gas presurizado (12);
un generador de vacío (22) acoplado de manera fluida a dicha fuente de gas presurizado (12);
una cámara de aspiración (26) acoplada de manera fluida a dicha fuente de gas presurizado (12) y a dicho generador de vacío (22);
un sensor de nivel de fluido (28) acoplado de manera funcional a dicha cámara de aspiración (26);
una bomba (30) acoplada de manera fluida a dicha cámara de aspiración (26);
un controlador proporcional (40); y
un ordenador (38) eléctricamente acoplado a dicho sensor de nivel de fluido (28), dicha bomba (30) y dicho controlador proporcional (40);
en el que, tras la selección de un caudal de succión deseado para dicha cámara de aspiración a través de dicho controlador proporcional, dicho sensor de nivel de fluido (28) determina un nivel de fluido real en dicha cámara de aspiración (26) y proporciona una señal correspondiente a dicho nivel de fluido determinado a dicho ordenador (38), y dicho ordenador (38) calcula un caudal de succión en respuesta a dicho nivel de fluido determinado y utiliza dicho caudal de succión calculado para detectar una oclusión.
2. Aparato según la reivindicación 1, en el que dicho ordenador (38) vigila un cambio en dicho caudal de succión calculado para detectar una oclusión.
3. Aparato según la reivindicación 1, en el que dicho ordenador (38) calcula una impedancia de succión en respuesta a dicho caudal de succión calculado y vigila un cambio en dicha impedancia de succión para detectar una oclusión.
4. Aparato según cualquiera de las reivindicaciones anteriores, en el que dicho ordenador (38) ajusta un parámetro quirúrgico de dicho sistema (10) en respuesta a dicha oclusión.
5. Aparato según la reivindicación 4, en el que dicho parámetro quirúrgico se selecciona de entre el grupo constituido por energía de ultrasonidos, caudal de succión deseado, presión de succión deseada, presión de infusión, velocidad de corte y ciclo de servicio con lumbrera abierta.
6. Aparato según cualquiera de las reivindicaciones anteriores, que comprende además un dispositivo quirúrgico (36) para aspirar tejido acoplado de manera fluida a dicha cámara de aspiración (26), y en el que dicho ordenador (38) ajusta un parámetro quirúrgico de dicho dispositivo (36) en respuesta a dicha oclusión.
7. Aparato según cualquiera de las reivindicaciones anteriores, en el que dicho generador de vacío (22) es un chip de vacío o un chip venturi.
8. Aparato según cualquiera de las reivindicaciones anteriores, en el que dicha bomba (30) es una bomba peristáltica.
9. Aparato según cualquiera de las reivindicaciones anteriores, en el que dicho sistema microquirúrgico (10) es un sistema microquirúrgico oftálmico.
10. Aparato según la reivindicación 3, en el que dicho ordenador (38) comunica a un cirujano una propiedad del tejido o del fluido en respuesta a dicho cambio en dicha impedancia de succión.
Patentes similares o relacionadas:
Colector extraíble para un sistema de recogida de residuos médicos/quirúrgicos, incluyendo el colector lengüetas para la alineación del colector, del 15 de Julio de 2020, de STRYKER CORPORATION: Un colector para la conexión a una unidad de recogida de residuos médicos / quirúrgicos , teniendo la unidad de recogida de residuos […]
Disposición de aguja, del 24 de Junio de 2020, de SAGA SURGICAL AB: Una disposición de aguja para una aplicación médica, comprendiendo la disposición de aguja: una funda de aguja alargada que tiene una superficie de […]
Dispositivo de cierre de herida por presión negativa, del 24 de Junio de 2020, de UNIVERSITY OF MASSACHUSETTS: Un dispositivo de cierre de heridas por presión negativa, el dispositivo de cierre de heridas comprende: un material de relleno de la herida […]
Módulo para conjunto de sensores de flujo de administración de medicamentos en base a la diferencia de presión para controlar la administración de los medicamentos y método para realizar el mismo, del 24 de Junio de 2020, de ICU MEDICAL, INC.: Un conjunto desechable para usar con un conjunto de sensores, el conjunto desechable que comprende: un cuerpo que tiene una porción de tapa […]
Control de succión variable, del 17 de Junio de 2020, de Gyrus ACMI, Inc. d/b/a/ Olympus Surgical Technologies America: Un aparato que comprende: un alojamiento que forma un mango y un eje , el eje se extiende desde el mango, y el alojamiento define […]
Boquilla múltiple para conectar un catéter, del 10 de Junio de 2020, de Smhers: Una boquilla múltiple para conectar un catéter (T), en que la boquilla múltiple comprende: una estructura que tiene un orificio interno formado […]
 Dispositivo, así como dispositivo funcional externo y dispositivo de tratamiento para tratar fluidos médicos, del 27 de Mayo de 2020, de FRESENIUS MEDICAL CARE DEUTSCHLAND GMBH: Dispositivo funcional externo con un dispositivo , donde el dispositivo presenta:
- al menos una cámara de recepción de fluido para recibir al menos […]
Dispositivo, así como dispositivo funcional externo y dispositivo de tratamiento para tratar fluidos médicos, del 27 de Mayo de 2020, de FRESENIUS MEDICAL CARE DEUTSCHLAND GMBH: Dispositivo funcional externo con un dispositivo , donde el dispositivo presenta:
- al menos una cámara de recepción de fluido para recibir al menos […]
INTERCAMBIADOR DE HUMOR ACUOSO, del 11 de Mayo de 2020, de GRIMALDOS RUIZ, Pedro: Intercambiador del humor acuoso de la cámara anterior del ojo, caracterizado porque comprende: un tubo de inyección , que incluye un líquido […]