CATETER GUIADO ROBOTICAMENTE.
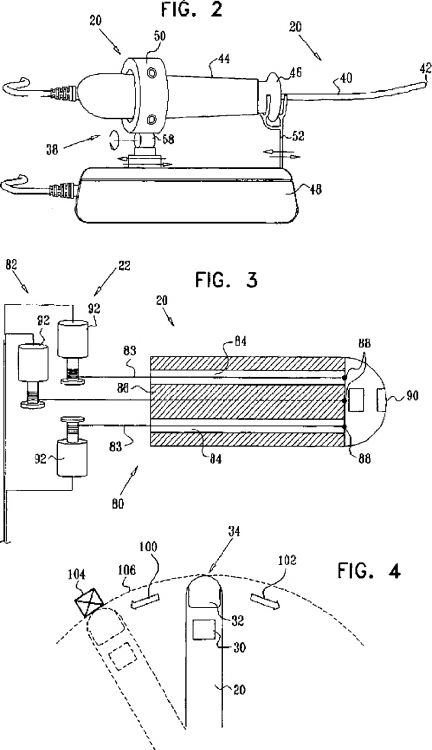
Aparato (22) para usarse con un catéter manejable (20;40) que incluye un control para el pulgar (46) adaptado para controlar una desviación de una punta distal (34;
42) del catéter (20; 40) y un sensor de posición (30), fijado en una proximidad de la punta distal (34; 42) y adaptado para generar una señal de posición, en la que la señal de posición es indicativa de seis dimensiones de información de localización y orientación, comprendiendo el aparato (22) un robot (38), que comprende:
un efector terminal (50; 52), adaptado para acoplarse con el control para el pulgar (46) cuando, en uso, el aparato (22) se acopla a un catéter de este tipo (20; 40); y
un controlador (48), adaptado en uso para recibir la señal de posición, y, dar respuesta a la misma, para accionar el efector terminal (50; 52) para posicionar la punta distal (34; 42) del catéter (20; 40) en una posición deseada manipulando el control para el pulgar (46)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05250993.
Solicitante: BIOSENSE WEBSTER, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3333 DIAMOND CANYON ROAD DIAMOND BAR,,CALIFORNIA 91765.
Inventor/es: GOVARI, ASSAF, ALTMANN,ANDRES CLAUDIO, EPHRATH,YARON.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Febrero de 2005.
Fecha Concesión Europea: 28 de Abril de 2010.
Clasificación Internacional de Patentes:
- A61B19/00M
- A61B19/00N6T
- A61M25/01C10
Clasificación PCT:
- A61B19/00
Clasificación antigua:
- A61B19/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Catéter guiado robóticamente.
Campo de la invención
La presente invención se refiere en general a instrumentos médicos invasivos, y específicamente a un aparato para manipular y manejar un catéter con fines de diagnostico y terapéuticos.
Antecedentes de la invención
Los mecanismos para mover, guiar y/o manejar instrumentos médicos invasivos tales como, catéteres, en tejidos vivos con fines terapéuticos, de diagnostico y quirúrgicos como son bastante conocidos en la técnica. Se han desarrollado tecnologías que posibilitan localizar y rastrear dispositivos médicos insertados dentro del cuerpo, incluyendo la determinación de la orientación de un punto en el dispositivo, tal como la punta de un catéter. Localizar un objeto quirúrgico dentro del tejido vivo puede realizarse en una diversidad de formas, incluyendo el uso de varias formas de energía electromagnética o ultrasónica. Numerosos mecanismos de dirección y desviación de catéteres son bastante conocidos en la técnica.
La patente de Estados Unidos 6.083.170 describe una sonda flexible, alargada que tiene un extremo distal para la introducción a través de tejido fisiológico, típicamente a través de un lumen en el tejido. La sonda incluye un sensor, que genera señales indicativas de una característica del tejido en una proximidad de la sonda, y un mecanismo de alineación, que desvía el extremo distal de la sonda en respuesta a las señales. Las señales pueden ser indicativas de las obstrucciones o de la dirección de un canal libre en el lumen.
La patente de Estados Unidos 5.492.131 describe un catéter guiado mediante un control dirigido dentro de un paso corporal mediante un sistema del tipo servo que incluye un sensor para transmitir información de posición, orientación o velocidad a un microprocesador que se programa típicamente con un algoritmo de detección de error, y un sistema de control de movimiento. El sistema de control de movimiento genera una señal representativa del cambio de posición, orientación o velocidad necesario para guiar el catéter a lo largo de un curso prescrito del recorrido o en general para ajustar continuamente su posición con respecto a una diana. Esta señal se transmite a un sistema de manejo dirigido, a un sistema de accionamiento hacia delante, o a ambos, para efectuar el cambio. El resultado se describe como un sistema servo de bucle cerrado capaz del avance y/o posicionamiento automático, preprogramado de la punta del catéter distal a través de pasos ramificados y con muchas curvas hasta un sitio en el que se necesita la acción terapéutica o desde el que se solicita información de diagnostico.
La patente de Estados Unidos 5.779.623 describe un dispositivo controlado de forma remota para posicionar de forma selectiva un instrumento médico dentro de una región o espacio predeterminado. El dispositivo incluye una abrazadera que tiene dos secciones montadas de forma que puedan pivotar posibilitando que la abrazadera se emplace ya sea en una posición abierta o en una posición cerrada. Cada sección tiene una rueda de accionamiento que incluye un surco con forma arqueada que acomoda el instrumento quirúrgico cuando la abrazadera se emplaza en la posición cerrada. Cada una de las ruedas tiene un engranaje de acoplamiento posicionado y configurado para pivotar separado cuando la abrazadera se emplaza en la posición abierta con las porciones de dientes de los engranajes permaneciendo engranadas entre sí. Una de las ruedas de accionamiento se acciona directamente mediante un motor alojado en una de las secciones de la abrazadera.
La patente de Estados Unidos 6.436.107 describe un sistema quirúrgico que incluye un instrumento quirúrgico controlado de forma remota acoplado a un controlador de herramienta que puede girar e impulsar el instrumento. El instrumento incluye una varilla accionadora que se acopla a un efector terminal y se conecta de forma que pueda retirarse a una varilla de empuje. La varilla de empuje puede moverse con respecto a la manivela para accionar el efector terminal. La manivela se puede asegurar con el controlador de herramienta insertando tornillos en las ranuras correspondientes que se colocan tanto en el instrumento como en el controlador de herramienta.
La patente de Estados Unidos 5.754.741 describe un sistema robótico que mueve un instrumento quirúrgico en respuesta del accionamiento de un pedal que puede operarse mediante el pie de un cirujano. El sistema robótico tiene un efector terminal que se adapta para sujetar un instrumento quirúrgico tal como un endoscopio. El efector terminal se acopla con un ensamble del brazo robótico que puede mover el endoscopio con relación al paciente. El sistema incluye un ordenador que controla el movimiento del brazo robótico en respuesta a las señales de entrada recibidas desde el pedal.
Las patentes de Estados unidos 5.649.956 y 6.461.372 describen las técnicas para sujetar de forma que pueda liberarse un instrumento quirúrgico, tal como un instrumento endoscópico configurado para suministrarse a través de una pequeña penetración percutánea en un paciente. El instrumento comprende un eje alargado con un par de tornillos montados lateralmente que se extienden desde el eje entre sus extremos proximal y distal. Un sujetador del instrumento comprende un soporte que tiene un orificio central y una ranura que se extiende axialmente para recibir el eje del instrumento y los tornillos de montaje. Un par de ranuras de bloqueo se tallan en el soporte de forma transversal hasta y en comunicación con la ranura axial de manera que los tornillos de montaje pueden hacerse girar dentro de las ranuras de bloqueo. El soporte del instrumento incluye además un ensamble de pestillo para bloquear automáticamente los tornillos de montaje dentro de las ranuras de bloqueo para acoplar de forma que pueda liberarse el instrumento con el sujetador del instrumento. Con este movimiento de bloqueo por torsión, el cirujano se describe siendo capaz de engranar y desengranar rápidamente varios instrumentos desde el sujetador durante un procedimiento quirúrgico, tal como una cirugía abierta, laparoscopia o toracoscopia.
El documento WO 99/45994 describe un sistema de cateterización de control remoto que incluye un dispositivo de propulsión, que inserta de forma controlada una sonda flexible, alargada dentro del cuerpo de un paciente. Una consola de control, en comunicación con el dispositivo de propulsión, incluye controles de usuario que se operan por un usuario del sistema lejos del paciente para controlar la introducción de la sonda dentro del cuerpo mediante el dispositivo de propulsión.
La Publicación de Solicitud de Patente de Estados Unidos 2002/0143326 describe las técnicas para asistir a un cirujano en trayectorias de conducción ablativas en el tejido, tal como, tejido cardíaco. Se puede configurar un dispositivo para operar como una plantilla que se adhiera a la superficie de tejido, y que permita al cirujano servir más fácilmente la trayectoria de conducción para formar una lesión en un emplazamiento deseado. En particular, la plantilla puede usarse para guiar el uso del cirujano de un instrumento quirúrgico a lo largo de una trayectoria de ablación deseada. En algunos casos, la plantilla puede incorporar partes físicas que soportan estructuralmente el instrumento para viajar a lo largo de la trayectoria de ablación.
La patente de Estados Unidos RE34.502 describe un catéter que comprende una manivela de control simétricamente cilíndrica, un cuerpo de catéter tubular alargado y una punta de catéter flexible que tiene un lumen desviado del eje de la punta del catéter. La manivela de control comprende un alojamiento que tiene una cámara de pistón en su extremo distal. Un pistón se monta en la cámara de pistón y se le permite el movimiento longitudinal. El extremo proximal del cuerpo del catéter se fija firmemente al extremo distal del pistón. Un alambre extractor se fija al alojamiento y se extiende a través del pistón, a través de y coaxial con el cuerpo del catéter y dentro del lumen desviado de la punta del catéter donde se fija a la pared de la punta del catéter. El movimiento longitudinal del pistón con respecto al alojamiento da como resultado la desviación de la punta del catéter.
La patente de Estados Unidos 6.210.407 describe un catéter bidireccional que comprende un cuerpo alargado, una sección de punta y una manivela de control. El cuerpo tiene al menos un lumen que se extiende a través del mismo. La sección de punta se monta en el extremo distal del cuerpo del catéter y tiene al menos dos lúmenes desviados del eje diametralmente opuestos, el primero...
Reivindicaciones:
1. Aparato (22) para usarse con un catéter manejable (20;40) que incluye un control para el pulgar (46) adaptado para controlar una desviación de una punta distal (34; 42) del catéter (20; 40) y un sensor de posición (30), fijado en una proximidad de la punta distal (34; 42) y adaptado para generar una señal de posición, en la que la señal de posición es indicativa de seis dimensiones de información de localización y orientación, comprendiendo el aparato (22) un robot (38), que comprende:
2. El aparato de acuerdo con la reivindicación 1, en el que el controlador se (48) se adapta para accionar el efector terminal (50; 52) para desviar la punta distal (34; 42) moviendo el control para el pulgar (46) longitudinalmente con respecto a un eje longitudinal del catéter (20; 40).
3. El aparato de acuerdo con la reivindicación 1 o reivindicación 2, en el que:
4. El aparato con una cualquiera de las reivindicaciones 1 a 3, en el que:
5. El aparato de acuerdo con una cualquiera de las reivindicaciones 1 a 4, que comprende un dispositivo señalador por ordenador, adaptado para recibir una indicación de una posición deseada de la punta distal (34; 42).
6. Un sistema de catéter guiado robóticamente (10) que comprende:
7. Aparato (22) para usarse con un catéter manejable (20; 40) que incluye los controles (44; 46) adaptados para controlar una desviación de una punta distal (34; 42) del catéter, cuyos controles se optimizan generalmente para la manipulación por una mano humana, un sensor de posición (30), fijado en una proximidad de la punta distal (34; 42) y adaptada para generar una señal de posición, en la que la señal de posición es indicativa de seis dimensiones de información de localización y orientación, comprendiendo el aparato (22) un robot (38), que comprende:
8. El aparato de acuerdo con la reivindicación 7, en el que el controlador (48) se adapta para accionar el efector terminal (50; 52) para desviar la punta distal (34; 42) moviendo la porción de los controles (46) longitudinalmente con respecto a un eje longitudinal del catéter (20; 40).
9. El aparato de acuerdo con la reivindicación 7 o reivindicación 8, en el que
10. El aparato de acuerdo con una cualquiera de las reivindicaciones 7 a 9, en el que
11. El aparato de acuerdo con una cualquiera de las reivindicaciones 7 a 11, que comprende un dispositivo señalador por ordenador, adaptado para recibir una indicación de la posición deseada de la punta distal (34; 42).
12. Un sistema de catéter guiado robóticamente (10) que comprende:
Patentes similares o relacionadas:
UN MECANISMO LIMITADOR DE UNA HERRAMIENTA, del 1 de Julio de 2011, de Stanmore Implants Worldwide Limited: Un mecanismo limitador de una herramienta que comprende un manipulador y un mecanismo de centrado remoto montado en el mismo, proporcionando […]
SISTEMA QUIRÚRGICO ULTRASÓNICO, del 24 de Junio de 2011, de ETHICON ENDO-SURGERY, INC.: - Un sistema quirúrgico ultrasónico que comprende: una unidad ultrasónica que incluye un instrumento conectado operativamente a un generador […]
PLATAFORMA ROBOTIZADA CON MÚLTIPLES APLICACIONES PARA NEUROCIRUGÍA Y PROCEDIMIENTO DE REAJUSTE, del 21 de Junio de 2011, de MEDTECH S.A: Plataforma robotizada con múltiples aplicaciones para neurocirugía caracterizada porque comprende: - una consola de planificación que integra […]
 INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
 DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
 SISTEMA DE DIRECCIONAMIENTO DE CATETER, del 7 de Octubre de 2010, de CATHRX LTD: Un mecanismo de direccionamiento de catéter, que incluye:
un miembro tubular que define un paso , teniendo el miembro tubular una porción […]
SISTEMA DE DIRECCIONAMIENTO DE CATETER, del 7 de Octubre de 2010, de CATHRX LTD: Un mecanismo de direccionamiento de catéter, que incluye:
un miembro tubular que define un paso , teniendo el miembro tubular una porción […]
 MANGO ACTIVO DE FUERZA CONTRARIA PARA EL USO EN INSTRUMENTOS BIDIRECCIONALES DE PUNTA DESVIABLE, del 22 de Julio de 2010, de C.R. BARD, INC.: Un ensamblaje de mango para el uso en un instrumento que tiene una dirección bidireccional de un árbol desviable , en el que tras desviarse de una condición […]
MANGO ACTIVO DE FUERZA CONTRARIA PARA EL USO EN INSTRUMENTOS BIDIRECCIONALES DE PUNTA DESVIABLE, del 22 de Julio de 2010, de C.R. BARD, INC.: Un ensamblaje de mango para el uso en un instrumento que tiene una dirección bidireccional de un árbol desviable , en el que tras desviarse de una condición […]
 UN CONJUNTO DE DISPOSITIVO DE ESTILETE Y TUBO MEDICO, del 7 de Diciembre de 2009, de COVIDIEN AG: Un conjunto de tubo de íleo que comprende un dispositivo de estilete y un tubo de íleo que tiene un interior en el cual se inserta […]
UN CONJUNTO DE DISPOSITIVO DE ESTILETE Y TUBO MEDICO, del 7 de Diciembre de 2009, de COVIDIEN AG: Un conjunto de tubo de íleo que comprende un dispositivo de estilete y un tubo de íleo que tiene un interior en el cual se inserta […]