CABEZA BUSCADORA PARA UN ARTEFACTO VOLADOR ILUMINADOR DE BLANCO.
Cabeza buscadora de modo dual para un artefacto volador buscador de blanco,
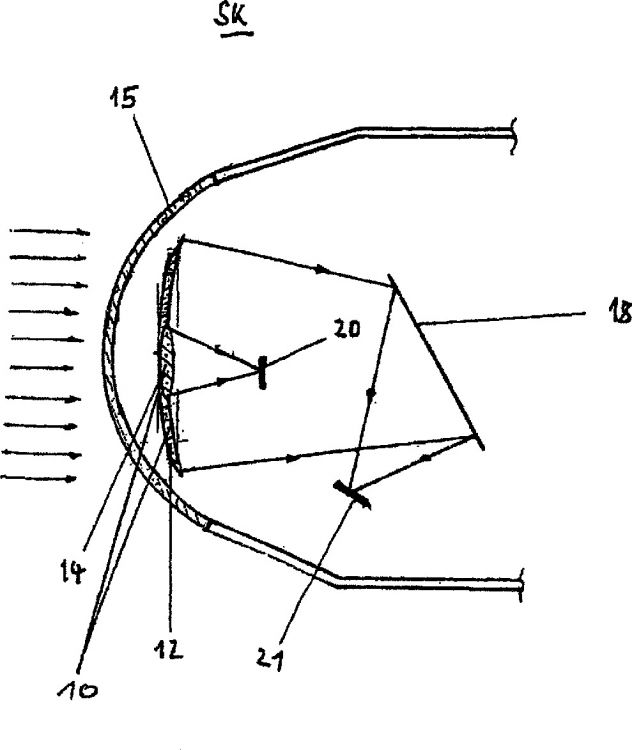
que presenta un detector de láser (20) que recibe los rayos láser reflejados por un blanco marcado por medio de impulsos de láser y un detector de IR (21) que recibe la radiación infrarroja emitida por el blanco, y que comprende también una electrónica de proceso de señales para la conversión de las señales suministradas por los detectores (21) en las señales de guía que controlan el artefacto volador guiado, caracterizada porque una óptica de infrarrojos (12) y una óptica de láser (14) que reacciona a los impulsos de láser están dispuestas concéntricamente una dentro de otra y forman una óptica de entrada común (10) para el canal de láser y el canal de infrarrojos de la electrónica de proceso de señales, estando dispuestos los detectores (20, 21) con respecto a la óptica de entrada (10) de tal manera que los rayos láser incidentes chocan directamente con el detector de láser (20) y los rayos IR chocan directamente con el detector de IR (21) después de una deflexión por medio de un espejo deflector (18)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08002328.
Solicitante: LFK LENKFLUGKORPERSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HAGENAUER FORST 27,86529 SCHROBENHAUSEN.
Inventor/es: RUGER,RODERICH.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Febrero de 2008.
Fecha Concesión Europea: 7 de Octubre de 2009.
Clasificación Internacional de Patentes:
- F41G7/22D
- F41G7/22G
- G01S17/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G01S7/481B2
- G01S7/481D
Clasificación PCT:
- F41G7/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
- F41G7/22 F41G […] › F41G 7/00 Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06). › Sistemas de guiado por mecanismos que responden a alguna clase de emanación del blanco (Homing).
- G01S17/88 G01S 17/00 […] › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G01S7/481 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Características constructivas, p. ej. disposiciones de elementos ópticos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Cabeza buscadora para un artefacto volador iluminador de blanco.
La invención concierne a una cabeza buscadora para artefactos voladores de adquisición y seguimiento de un blanco marcado por medio de impulsos de láser con una frecuencia de repetición de impulsos predeterminada, que comprende un sensor de láser que reacciona a los impulsos de láser reflejados desde el blanco y un sensor de infrarrojos (IR) formador de imagen que reacciona a la radiación IR emitida por el objeto marcado y cuyas señales son convertidas por medio de una electrónica de proceso de señales asociada en señales de guía que controlan la fase de aproximación al blanco del artefacto volador.
Se conocen múltiples de formas cabezas buscadoras de IR que forman imágenes y que perciben la radiación propia de los objetos actuantes como blanco. Estas cabezas requieren un blanco marcado antes del despegue del artefacto volador en la imagen del cuerpo buscador; según el llamado procedimiento de captura antes de lanzamiento (lock-on-before launch-LOBL), el blanco es rastreado por la cabeza buscadora y queda sujeta al vuelo de aproximación de ésta. El campo de visión de la cabeza buscadora puede ser aquí pequeño y solamente el blanco a alcanzar tiene que encontrar sitio en el mismo. Son usuales para ello campos de visión del orden de magnitud de 1º; véase el documento DE 41 35 260 C1.
Sin embargo, con tales cabezas buscadoras se pueden combatir solamente blancos con los cuales existe un enlace visual al disparar el artefacto volador y los cuales tienen también desde la distancia correspondiente una signatura suficiente en la imagen de la cabeza buscadora. Cuando, fuera de un enlace visual directo, han de encontrarse de forma autónoma blancos terrestres con una cabeza buscadora de infrarrojos únicamente después del despegue -es decir, a continuación del llamado procedimiento de captura después de lanzamiento (lock-on-after launch-LOAL)-, hay que contar con una incertidumbre grande respecto de un impacto en el blanco. Para que, después de cierto trayecto de vuelo del artefacto volador, pueda esperarse en definitiva con alguna seguridad que el blanco esté dentro del campo de visión de la cabeza buscadora de infrarrojos, el campo de visión ha de ser grande, es decir, ha de ascender al menos a aproximadamente 10º. Sin embargo, como es natural, con un campo de visión grande el alcance de captura de la cabeza buscadora de IR es correspondiente más pequeño. En el caso de un tamaño de construcción prefijado, el alcance de la cabeza buscadora de IR es, para un tamaño diez veces mayor del campo de visión, aproximadamente diez veces más pequeño. Además, es inseguro que el blanco, aun cuando esté dentro del campo de visión, sea encontrado de forma autónoma por la cabeza buscadora y que sea el blanco correcto.
Para poner remedio a este inconveniente se utilizan cabezas buscadoras de mancha de láser para el procedimiento LOAL. A este fin, se tiene que iluminar el blanco con radiación de láser de frecuencia temporal determinada. La cabeza buscadora de mancha de láser busca esta mancha de láser determinada. Cuando no existen perturbadores, este procedimiento funciona de manera bastante fiable. Sin embargo, la desventaja decisiva consiste en que el blanco tiene que ser iluminado activamente, es decir que el contrario es avisado y, por tanto, son de esperar contramedidas. Todas las cabezas buscadoras de mancha de láser introducidas en la práctica trabajan en un dominio espectral en torno a 1,06 µm; sin embargo, podrían utilizarse aquí igualmente bien los dominios espectrales seguros para los ojos con una longitud de onda de 1,54 µm.
Según la patente US 6.111.241, se han propuesto las llamadas cabezas buscadoras de modo dual. Está previsto allí como detector un llamado fotodiodo PIN para la recepción de los rayos láser reflejados por un blanco marcado por medio de impulsos de láser con un frecuencia de repetición de impulsos predeterminada; para la recepción de la radiación IR emitida por el blanco marcado está prevista como detector una red de planos focales formadora de imágenes. La evaluación de las señales de estos detectores corre a cargo de una electrónica de procesos de señales que correlaciona estas señales de tal manera que solamente el respectivo último impulso de láser sea utilizado como señal marcadora de blanco proveniente de una zona del blanco determinada por la red con miras a la generación de señales de guía para dirigir el artefacto volador hacia la mancha de láser que marca al blanco.
El documento US-A-4 009 848 revela una cabeza buscadora de modo dual para un artefacto volador buscador de blanco con una óptica de entrada común para el canal de láser y para el canal de infrarrojos de la electrónica de procesos de señales.
El documento US-A-4 009 393 revela una cabeza buscadora de modo dual, en la que una óptica de ultravioleta y una óptica de infrarrojos están dispuestas concéntricamente una dentro de otra y forman una óptica de entrada común para el canal de ultravioleta y para el canal de infrarrojos.
Una cabeza buscadora de modo dual permite de manera ideal un funcionamiento pasivo en tanto exista un enlace visual con el blanco; por tanto, la cabeza buscadora de IR ha de tener un alcance lo más grande posible, el campo de visión puede ser pequeño y solamente para el caso sin enlace visual con el blanco se utiliza la cabeza buscadora de mancha de láser con aproximadamente 10º de campo de visión para la búsqueda autónoma del blanco, es decir, para la búsqueda autónoma de la mancha de láser. Una vez que se ha encontrado el blanco, la cabeza buscadora de infrarrojos se hace cargo de la búsqueda del blanco y se puede desconectar el iluminador de láser.
Como consecuencia de las estrechas limitaciones de los bastidores cardánicos en una cabeza buscadora, se tiene que utilizar para la cabeza buscadora de infrarrojos y para la cabeza buscadora de mancha de láser una óptica parcialmente común que ha de repartirse por medio de una división de rayo espectral en el canal de infrarrojos y en el canal de mancha de láser. Sin embargo, la utilización parcialmente común de la óptica da lugar a que haya que separar una parte de la óptica para 1,06 µm o 1,54 µm y una parte transparente para 8 a 12 µm o para 3 a 5 µm. Aparte de esta división del rayo, tienen que estar previstas ópticas de adaptación para el canal de infrarrojos y para el canal de láser. Los tamaños de los campos de visión para el canal de infrarrojos y para el canal de láser están estrechamente vinculados y ya no se pueden elegir libremente. Por tanto, a pesar del gran coste, tales ópticas de modo dual no se pueden adaptar a los requisitos referentes a un alcance grande para el canal de IR y un campo de visión grande para el canal de láser, de modo que no se pueden conseguir con un coste tolerable relaciones de visión de canal de infrarrojos a canal de láser de, por ejemplo, diez veces mayores, tal como es propiamente necesario.
Es aquí donde interviene ahora la invención, cuyo problema consiste en crear una nueva cabeza buscadora de modo dual que sea más adecuada que hasta ahora para su utilización en combinación con artefactos voladores buscadores de blanco.
Este problema se resuelve según la invención por medio de las características de la reivindicación 1.
Otras características de la invención se desprenden de las reivindicaciones subordinadas.
Por tanto, según la invención, en una cabeza buscadora de IR que trabaja en forma pasiva está dispuesta en el centro de su óptica de entrada la óptica de un sensor de láser necesaria para el reconocimiento del blanco marcado por medio de rayos láser. El sensor de láser está configurado de manera ventajosa como un detector de cuatro cuadrantes. Tales detectores tienen una longitud de arista de aproximadamente tres milímetros, de modo que con esta utilización se pueden conservar inalterados los componentes ópticos y mecánicos para el sensor de IR. Como en sí conocido, tales cabezas buscadoras de IR pasivas están montadas de forma cardánica alrededor de dos ejes y presentan un espejo accionado a motor con miras a la exploración por líneas del campo visual captado por la óptica de IR y reproducido sobre el detector de IR a través de un espejo de deflexión, o bien presentan una matriz de detectores de IR.
Debido a la configuración de la cabeza buscadora de modo dual según la invención se pueden elegir libremente, según las necesidades, los campos de visión de la óptica del canal de infrarrojos y de la óptica del canal de láser. Otra ventaja puede verse en que se pueden...
Reivindicaciones:
1. Cabeza buscadora de modo dual para un artefacto volador buscador de blanco, que presenta un detector de láser (20) que recibe los rayos láser reflejados por un blanco marcado por medio de impulsos de láser y un detector de IR (21) que recibe la radiación infrarroja emitida por el blanco, y que comprende también una electrónica de proceso de señales para la conversión de las señales suministradas por los detectores (21) en las señales de guía que controlan el artefacto volador guiado, caracterizada porque una óptica de infrarrojos (12) y una óptica de láser (14) que reacciona a los impulsos de láser están dispuestas concéntricamente una dentro de otra y forman una óptica de entrada común (10) para el canal de láser y el canal de infrarrojos de la electrónica de proceso de señales, estando dispuestos los detectores (20, 21) con respecto a la óptica de entrada (10) de tal manera que los rayos láser incidentes chocan directamente con el detector de láser (20) y los rayos IR chocan directamente con el detector de IR (21) después de una deflexión por medio de un espejo deflector (18).
2. Cabeza buscadora según la reivindicación 1, caracterizada porque la óptica (14) asociada al canal de láser está dispuesta en la zona de sombra central de la óptica (12) del canal de infrarrojos que recibe la radiación infrarroja y está asociada al canal de infrarrojos, y se encuentra colocada en posición coaxial con respecto a la primera óptica citada.
3. Cabeza buscadora según la reivindicación 1, caracterizada porque la óptica (14) asociada a la radiación de láser está diseñada y corregida para un dominio espectral de 1,06 µm o 1,54 µm, y la óptica (12) asociada a la radiación IR está diseñada y corregida para un dominio espectral de 3 µm a 5 µm o de 8 µm a 12 µm.
4. Cabeza buscadora según la reivindicación 1, caracterizada porque la óptica (14) asociada a la radiación de láser presenta un campo de visión del orden de magnitud de 5º a 10º y la óptica (12) asociada a la radiación IR presenta un campo de visión de 1º a 2º.
5. Cabeza buscadora según una o más de las reivindicaciones anteriores, caracterizada porque la óptica (14) asociada a la radiación de láser es una lente individual que está dispuesta coaxialmente al eje óptico de la óptica (12) configurada también como una lente individual y asociada a la radiación IR.
6. Cabeza buscadora según la reivindicación 5, caracterizada porque el domo (15) que cubre la óptica (10) de la cabeza buscadora (SK) es de ZnS y, para una longitud de onda de 1 µm o 1,5 µm y de 8-12 µm o 3-5 µm, presenta una tasa de transmisión de > 70%.
Patentes similares o relacionadas:
CARRIL PARA VEHÍCULOS PESADOS CON MEDIOS DE COMPROBACIÓN DE VEHÍCULO VACÍO, del 18 de Junio de 2020, de INFORMATICA EL CORTE INGLES, S.A.: 1. Carril para vehículos pesados con medios de comprobación de vehículo vacío, caracterizado porque está constituido a partir de un carril para paso de vehículos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo para controlar un relleno de separación, vehículo que comprende dicho dispositivo y método de control asociado, del 29 de Abril de 2020, de ALSTOM Transport Technologies: Un dispositivo para controlar un relleno de separación con el que se va a equipar una puerta de un vehículo ferroviario , dicho dispositivo de control comprende: […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Método y aparato para la formación de imágenes fantasma computacional, del 24 de Julio de 2019, de BAE SYSTEMS PLC: Un aparato de formación de imágenes fantasma computacional que comprende una primera fuente de radiación electromagnética y un sistema […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y control de disparo que implementa un tal procedimiento, del 20 de Diciembre de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]