BRAZO POLIARTICULADO.
Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado (1) en un plano (2),
que comprende un primer elemento (3), un segundo elemento (4) y un tercer elemento (5) articulados sucesivamente mediante articulaciones (6), que definen su dirección longitudinal (7), en el que el primer elemento (3) y el tercer elemento (5) están articulados entre sí por un vástago (8) mediante dos articulaciones (9, 10) situadas cada una a proximidad de la articulación (6) de cada uno de dichos elementos con el segundo elemento (4) y en dirección perpendicular a la dirección longitudinal (7) los elementos primero (3) y tercero (5) y estando dichas dos articulaciones (6) situadas en lados opuestos del brazo (1), que proporciona una cinemática especialmente adecuada para sostener y desplazar herramientas o útiles en un entorno da trabajo gracias a una configuración geométrica arqueada de radio de curvatura variable.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802376.
Solicitante: PEPIOL ESPALLARGAS, FRANCISCO ANDRES.
Nacionalidad solicitante: España.
Inventor/es: AMAT GIRBAU,JOSEP, CASALS GESPI,ALICIA, ARANDA LOPEZ,JUAN, PEPIOL ESPALLARGAS,FRANCISCO ANDRE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Uniones.
- B25J18/06 B25J […] › B25J 18/00 Brazos. › flexibles.
Fragmento de la descripción:
Brazo poliarticulado.
La presente invención se refiere a un brazo poliarticulado robótico cuya cinemática es especialmente adecuada para sostener y desplazar herramientas o útiles en un entorno de trabajo, caracterizándose por adquirir una configuración geométrica arqueada de radio de curvatura variable.
Antecedentes de la invención
Son conocidos los brazos poliarticulados destinados a sostener y desplazar herramientas o utensilios soportados en uno de sus extremos.
En general, estos brazos comprenden una pluralidad de elementos concatenados que permiten el posicionado de su extremo.
Entre las arquitecturas más utilizadas pueden destacarse las arquitecturas denominadas clásicas, que son: las basadas en elementos articulados que generan desplazamientos, lo que da lugar a los Robots de coordenadas cartesianas; arquitecturas mixtas, basadas en elementos articulados en forma de desplazamientos y en forma de giros, que dan lugar arquitecturas de coordenadas polares o cilíndricas; o las arquitecturas basadas en los giros de sus articulaciones y que dan lugar a las arquitecturas de coordenadas angula-res.
Entre las arquitecturas denominadas no clásicas pueden destacarse la trompa de elefante, consistente en la concatenación de un cierto número de elementos, y por lo tanto de giros, en un mismo plano, y la plataforma de Stewart, consistente en un soporte con seis grados de libertad.
Por otro lado, existen cadenas cinemáticas denominadas subactuadas, que son accionadas por un único actuador, entre las que se pueden citar los dedos con falanges dotados de un mando único, utilizados en algunas manos robóticas, y los brazos extensibles de tipo ballesta.
Una de las ventajas que representa el poder disponer de cadenas cinemáticas poliarticuladas subactuadas es poder obtener una mayor capacidad de desplazamiento no efectuando giros o desplazamientos, lo que en muchos casos condicionan la accesibilidad, sino consiguiendo flexionar su arquitectura.
Dado que las cadenas cinemáticas o brazos poliarticulados mencionados tienen limitaciones desde el punto de vista de la curvatura del brazo y del espacio que ocupan durante su utilización, el solicitante propone en la siguiente descripción un brazo poliarticulado cuya cinemática le permite superar los problemas mencionados.
Descripción de la invención
La presente invención se refiere a un brazo poliarticulado en un plano, que comprende al menos un primer elemento, un segundo elemento y un tercer elemento articulados sucesivamente mediante articulaciones, definiendo dichas articulaciones de cada elemento su dirección longitudinal, que se caracteriza por el hecho de que el primer elemento y el tercer elemento están articulados entre sí por un vástago mediante dos articulaciones situadas cada una a proximidad de la articulación de cada uno de dichos elementos con el segundo elemento y en dirección sensiblemente perpendicular a la dirección longitudinal de cada uno de dichos primer elemento y tercer elemento y estando dichas dos articulaciones situadas en lados opuestos del brazo.
Estas características confieren al brazo una cinemática especialmente adaptada para ser usado como soporte desplazable desde un techo o desde un soporte situado por encima del operario, o desde una base fija o desplazable sobre el suelo.
Concretamente, al lograrse un radio de curvatura controlable, que es menor que el de los codos de las articulaciones clásicas de los robots, permite adaptarse mejor a muchos entornos y por tanto se consigue una mejor maniobrabilidad.
Preferentemente, cada uno de los elementos está formado por un segmento central en cuyos extremos están unidos dos segmentos perpendiculares al segmento central y situados a ambos lados de este, forma que le confiere una cinemática predecible y adecuada para las curvaturas que se persiguen con la inven-ción.
Ventajosamente, los elementos son idénticos y concatenables, de modo que se facilita su construcción y ensamblado, y que además le confiere la variación de curvatura deseada.
Aún más preferentemente, cada elemento está compuesto por dos perfiles paralelos y separados, de modo que aumenta su rigidez con el mismo peso y además es posible disponer los cables o tubos de control o suministro a las herramientas dispuestas en el extremo.
Finalmente, cada elemento está compuesto por dos barras paralelas unidas en sus extremos por dos piezas provistas de orificios para las diferentes articulaciones.
Breve descripción de los dibujos
Para mejor comprensión de cuanto se ha expuesto se acompañan unos dibujos en los que, esquemáticamente y tan sólo a titulo de ejemplo no limitativo, se representan dos casos prácticos de realización.
La figura 1 es una vista esquemática en alzado del brazo poliarticulado objeto de la invención cuando no está curvado.
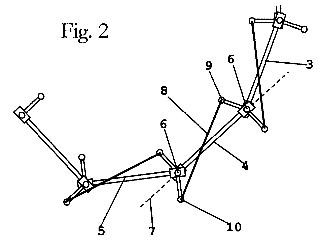
La figura 2 es una vista esquemática en alzado del brazo poliarticulado objeto de la invención cuando está curvado.
La figura 3 es una vista en perspectiva de una realización preferida de uno de los elementos que componen el brazo poliarticulado.
La figura 4 es una vista en perspectiva de un brazo poliarticulado hecho con elementos según la figura tres y provisto de medios para orientar el plano del brazo.
Descripción de realizaciones preferidas
Tal como se esquematiza en las figuras 1 y 2, la invención se refiere a un brazo poliarticulado 1 en un plano 2, que comprende al menos un primer elemento, un segundo elemento 4 y un tercer elemento 5 articulados sucesivamente mediante articulaciones 6, definiendo dichas articulaciones 6 de cada elemento su dirección longitudinal 7, representada a trazos.
Concretamente, en el brazo de la invención el primer elemento 3 y el tercer elemento 5 de la cadena formada están articulados entre sí por un vástago 8 mediante dos articulaciones 9, 10. Estas articulaciones están situadas cada una a proximidad de la articulación 6 de cada uno de dichos elementos con el segundo elemento 4 y en dirección sensiblemente perpendicular a la dirección longitudinal 7 de cada uno de dichos elementos alternados 3 y 5 y estando dichas dos articulaciones 6 situadas en lados opuestos del brazo 1.
Por lo tanto, la estructura general del brazo es una sucesión de elementos articulados según ejes paralelos, de modo que el movimiento del brazo se realiza en un plano, pero que tiene la particularidad de que los pares de elementos separados por otro elemento están articulados entre sí mediante el mencionado vástago. De este modo, es posible controlar desde uno de los extremos del brazo la curvatura de este, y por lo tanto, la posición del extremo del brazo. En un brazo de tipo ballesta, el movimiento del extremo se limita a un desplazamiento lineal. No así en el de la invención.
Por otro lado, las articulaciones de tipo dedo presentan el inconveniente de que el accionamiento se realiza mediante cables, lo cual implica un sistema de transmisión complejo.
En la figura 1 se presenta una realización preferida del brazo poliarticulado en el que cada uno de los elementos 3, 4, 5 está formado por un segmento central 11 en cuyos extremos están unidos dos segmentos 12, 13 perpendiculares al segmento central y situados a ambos lados de este.
Asimismo, tal como se puede apreciar en las figuras 1,2 y 4, los elementos 3, 4, 5 son idénticos y concatenables.
Por concatenables se entiende que la estructura de cada elemento le permite ser articulado con un elemento idéntico. Esto implica que los extremos de dos elementos destinados a ser articulados son diferentes para permitir su encaje, tal como se ilustra por ejemplo en la figura 3.
Según otra realización preferida de la invención, cada elemento 3, 4, 5 está compuesto por dos perfiles 14, 15 paralelos y separados, de modo que es posible canalizar y proteger por el espacio resultante los cables y tubos de suministro y control de la o las herramientas que se dispondrán en el extremo del brazo. En una forma de realización concreta del brazo, cada elemento está compuesto por dos barras paralelas 14, 15 unidas en sus extremos por dos piezas 16, 17 provistas de orificios 18 para las diferentes articulaciones.
El brazo de la invención está tanto concebido para sostener herramientas desde un cielo raso o un soporte situado por encima del operario como sobre una base fija o móvil...
Reivindicaciones:
1. Brazo poliarticulado (1) en un plano (2), que comprende al menos un primer elemento (3) , un segundo elemento (4) y un tercer elemento (5) articulados sucesivamente mediante articulaciones (6), definiendo dichas articulaciones (6) de cada elemento su dirección longitudinal (7), caracterizado por el hecho de que el primer elemento (3) y el tercer elemento (5) están articulados entre sí por un vástago (8) mediante dos articulaciones (9, 10) situadas cada una a proximidad de la articulación (6) de cada uno de dichos elementos con el segundo elemento (4) y en dirección sensiblemente perpendicular a la dirección longitudinal (7) de cada uno de dichos primer elemento (3) y tercer elemento (5) y estando dichas dos articulaciones (6) situadas en lados opuestos del brazo (1).
2. Brazo poliarticulado según la reivindicación 1, caracterizado por el hecho de que cada uno de los elementos (3, 4, 5) está formado por un segmento central (11) en cuyos extremos están unidos dos segmentos (12, 13) perpendiculares al segmento central y situados a ambos lados de este.
3. Brazo poliarticulado según la reivindicación 1, caracterizado por el hecho de que dichos elementos (3, 4, 5) son idénticos y concatenables.
4. Brazo poliarticulado según la reivindicación 1, caracterizado por el hecho de que cada elemento (3, 4, 5) está compuesto por dos perfiles (14, 15) paralelos y separados.
5. Brazo poliarticulado según la reivindicación anterior, caracterizado por el hecho de que cada elemento está compuesto por dos barras paralelas (14, 15) unidas en sus extremos por dos piezas (16, 17) provistas de orificios (18) para las diferentes articulaciones.
Patentes similares o relacionadas:
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Disposición articulada con al menos un eje accionado, del 26 de Abril de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Disposición articulada con al menos un eje accionado, en particular para activar un movimiento de un componente de un robot, - en donde al menos […]
Aparato de posicionamiento para uso biomédico, del 20 de Febrero de 2019, de CONMED CORPORATION: Aparato de posicionamiento médico para posicionar y sostener un objeto, que comprende: un componente telescópico que se extiende […]
Dispositivo de posicionamiento previo y de fijación amovible de miembros articulados de un robot humanoide, del 12 de Abril de 2017, de Softbank Robotics Europe: Robot móvil que comprende un tronco y varios miembros conectados al tronco de manera amovible, caracterizado porque comprende: […]
 Una herramienta flexible, del 29 de Julio de 2015, de ROLLS-ROYCE PLC: Una herramienta flexible , que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí; y
medios rígidos, que comprenden un medio […]
Una herramienta flexible, del 29 de Julio de 2015, de ROLLS-ROYCE PLC: Una herramienta flexible , que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí; y
medios rígidos, que comprenden un medio […]
Un dispositivo de múltiples piezas de ligadura que tiene un miembro de refuerzo, del 20 de Junio de 2012, de CARNEGIE MELLON UNIVERSITY: Un dispositivo de múltiples piezas de ligadura o eslabones y dirigible, que comprende: un primer mecanismo de múltiples piezas de ligadura; caracterizado […]
MAQUINA DE REVESTIMIENTO CON UN PULVERIZADOR Y UNA ARTICULACION GIRATORIA., del 16 de Octubre de 2005, de DURR SYSTEMS GMBH: Máquina de revestimiento para el revestimiento en serie electrostático de piezas de trabajo con un pulverizador el cual para la carga del material […]
 MECANISMO DE CINEMÁTICA PARALELA CON ARTICULACIÓN ESFÉRICA CONCÉNTRICA, del 7 de Febrero de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad, comprendiendo el mecanismo: […]
MECANISMO DE CINEMÁTICA PARALELA CON ARTICULACIÓN ESFÉRICA CONCÉNTRICA, del 7 de Febrero de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad, comprendiendo el mecanismo: […]