APARATO Y METODO PARA CONMUTACION DE ALTA VELOCIDAD EN TRANSPORTADORES.
Transportador (100) que comprende:
una cinta transportadora (102) que incluye una serie de cavidades (114),
una serie de primeros rodillos de desvío (804), y una serie de segundos rodillos de desvío (806), estando cada rodillo de desvío (804, 806) dispuesto en una cavidad (114); en el que cada uno de la serie de primeros rodillos de desvío (804) está orientado en un primer ángulo en relación con la dirección de desplazamiento de la cinta transportadora, y cada uno de la serie de segundos rodillos de desvío (806) está orientado en un segundo ángulo en relación con la dirección de desplazamiento de la cinta transportadora, caracterizado por
por lo menos un primer rodillo transversal (810) que tiene un eje que se extiende en una dirección de desplazamiento de la cinta transportadora y que puede acoplarse con la serie de primeros rodillos de desvío (804) para provocar que los primeros rodillos de desvío roten a medida que se desplazan a lo largo de dicho por lo menos un primer rodillo transversal; y
por lo menos un segundo rodillo transversal (810) que tiene un eje que se extiende en la dirección de desplazamiento de la cinta transportadora y que puede acoplarse con la serie de segundos rodillos de desvío (806) para provocar que los segundos rodillos de desvío roten a medida que se desplazan a lo largo de dicho por lo menos un segundo rodillo transversal
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/035151.
Solicitante: LAITRAM L.L.C..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 220 LAITRAM LANE,HARAHAN, LOUISIANA 70123.
Inventor/es: FOURNEY,MATTHEW,L.
Fecha de Publicación: .
Fecha Concesión Europea: 26 de Mayo de 2010.
Clasificación Internacional de Patentes:
- B65G17/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 17/00 Transportadores que tienen un elemento de tracción sin fin, p.ej. una cadena que transmite el movimiento a una superficie portante de cargas continua o sensiblemente continua, o a una serie de portacargas individuales; Transportadores de cadenas sin fin en los que las cadenas constituyen la superficie que lleva la carga. › que tienen una serie de rodillos que desplaza el elemento de tracción sobre una superficie portante para efectuar el transporte de cargas o de portacargas.
- B65G17/40 B65G 17/00 […] › Cadenas que actúan de portacargas.
- B65G47/71 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › siendo los objetos descargados sobre varios transportadores.
Clasificación PCT:
- B65G47/10 B65G 47/00 […] › a partir de varios grupos de objetos.
Fragmento de la descripción:
Aparato y método para conmutación de alta velocidad en transportadores.
Referencia cruzada a solicitud relacionada
Esta solicitud reivindica prioridad para la solicitud provisional copendiente de EE.UU. titulada, "APPARATUS AND METHODS FOR HIGH SPEED CONVEYOR SWITCHING" ("aparatos y métodos para conmutación de alta velocidad en transportadores") con número de serie 60/613 857, presentada el 28 de septiembre de 2004.
Campo técnico
La invención se refiere en general a un transportador acorde con los preámbulos de las reivindicaciones 1 y 9, como el que se da a conocer en el documento US-B-6571937. La invención se refiere asimismo a un método para transportar objetos, de acuerdo con el preámbulo de la reivindicación 10.
Descripción de la técnica relacionada
Como es sabido, las instalaciones de fabricación, distribución, embarque y otras utilizan frecuentemente sistemas de transporte para manipular una amplia variedad de productos. Adicionalmente, los transportadores utilizan frecuentemente conmutadores para desviar productos a destinos específicos y repartir productos en dos o más flujos o filas de salida. Los conmutadores para repartir productos o cajas de productos desde transportadores, han utilizado históricamente una guía articulada en un extremo. La guía desviaría la caja entrante a dos o más flujos de salida. Estos sistemas de guiado experimentaron una utilización generalizada pero estaban limitados en velocidad.
Hace más de treinta años se desarrollaron conmutadores de velocidad superior, y siguen utilizándose en muchos sistemas transportadores. Sin embargo, en relación con los requisitos de velocidad y fiabilidad de los sistemas transportadores actuales, los conmutadores de velocidad superior requieren grandes longitudes del transportador en aplicaciones de velocidad superior, y son de mantenimiento intensivo.
Resumen
La invención es un transportador que comprende las características de las reivindicaciones anexas 1, 9 y un método de transporte acorde con la reivindicación 10.
Se dan a conocer transportadores y métodos para fabricar y utilizar un transportador. En algunas realizaciones, el transportador comprende una cinta transportadora que incluye una serie de cavidades, una serie de primeros rodillos de desvío, y una serie de segundos rodillos de desvío, donde cada rodillo de desvío está dispuesto en una cavidad. El transportador incluye asimismo un primer rodillo transversal que tiene un eje que se extiende en una dirección de desplazamiento de la cinta transportadora y que puede acoplarse a la serie de primeros rodillos de desvío para provocar que los primeros rodillos de desvío roten a medida que se desplazan a lo largo del primer rodillo transversal, y un segundo rodillo transversal que tiene un eje que se extiende en la dirección de desplazamiento de la cinta transportadora y que puede acoplarse a una serie de segundos rodillos de desvío para provocar que los segundos rodillos de desvío roten a medida que se desplazan a lo largo del segundo rodillo transversal. Los rodillos de desvío están orientados de manera que cada uno de los primeros rodillos de desvío está orientado en un primer ángulo respecto de la dirección de desplazamiento de la cinta transportadora, y cada uno de los segundos rodillos de desvío está orientado en un segundo ángulo respecto de la dirección de desplazamiento de la cinta transportadora.
Breve descripción de los dibujos
Los transportadores y los métodos dados a conocer pueden comprenderse mejor haciendo referencia a los siguientes dibujos. Los componentes en los dibujos no están necesariamente a escala.
La figura 1 es una vista en perspectiva de una realización de una sección de un transportador que incluye una cinta transportadora que tiene un primer rodillo que está acoplado operativamente a un segundo rodillo.
La figura 2 es una vista más detallada de una sección del transportador de la figura 1.
La figura 3 es una vista superior de una realización de una sección del transportador la figura 1.
La figura 4 es una vista frontal de una realización de una sección del transportador la figura 1.
La figura 5 es un diagrama de flujo que ilustra una realización de un método para transportar objetos.
La figura 6A es una vista en perspectiva de una realización ejemplar de un primer rodillo de desviación.
La figura 6B es una vista lateral del rodillo de la figura 6A.
La figura 7 es un diagrama de flujo que ilustra una realización de un método de conmutación en un sistema transportador.
La figura 8A es una vista superior de una realización de un aparato acorde con la invención de la reivindicación 1 para la conmutación en un sistema transportador.
La figura 8B es una vista lateral de una realización de un aparato acorde con la invención de la reivindicación 1 para la conmutación en un sistema transportador.
La figura 9 es un diagrama de flujo que ilustra una realización de un método de conmutación en un sistema transportador.
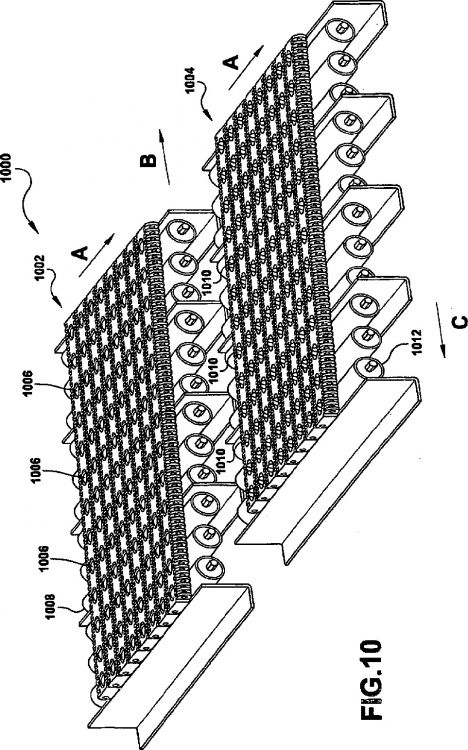
La figura 10 es una vista en perspectiva de una realización de un aparato para conmutación en un sistema transportador, de acuerdo con la reivindicación 9.
Descripción detallada
En el presente documento se dan a conocer transportadores, y métodos de fabricación y utilización de transportadores, para conmutar objetos procedentes de una línea a dos o más líneas, en una longitud corta de un sistema transportador. La conmutación puede llevarse a cabo utilizando un solo transportador capaz de desviar objetos selectivamente en más de una dirección, o a través de múltiples transportadores adyacentes, configurado cada uno para desviar selectivamente objetores en una dirección diferente.
Además, se dan a conocer transportadores y métodos para transportar objetos que reducen el deslizamiento de los rodillos transportadores. Gracias a dicho deslizamiento reducido, los transportadores desvían con mayor eficacia objetos en la cinta transportadora. En algunas realizaciones, el transportador incluye primeros rodillos dispuestos en la cinta transportadora y por lo menos un segundo rodillo situado bajo la cinta transportadora, que puede rotar en una dirección transversal a la dirección de desplazamiento de la cinta transportadora. Cuando la cinta transportadora se desplaza a lo largo del segundo rodillo, el segundo rodillo se acopla operativamente con el primer rodillo provocando de roten los primeros rodillos y los segundos rodillos. Gracias a la rotación del segundo rodillo, los primeros rodillos rotan con deslizamiento reducido.
A continuación haciendo referencia en mayor detalle a las figuras, en las que los mismos números de referencia indican partes correspondientes, la figura 1 ilustra un diagrama en perspectiva de una realización de una sección de un transportador 100 en el que se disponen una serie de primeros rodillos 104 en una cinta transportadora 102. Tal como se indica en esta figura, la cinta transportadora 102 es modular e incluye por lo menos una cadena Mat-Top 110. La cadena Mat-Top 110 tiene una serie de cavidades 114, en las que están dispuestos los primeros rodillos 104. A modo de ejemplo, los primeros rodillos comprenden ruedas plásticas que incluyen capas de caucho exteriores o neumáticos (véase la discusión de las figuras 6A y 6B). Dicha configuración incrementa la fricción entre los primeros rodillos 104 y las superficies que contactan los rodillos (es decir, las superficies de los segundos rodillos 106 descritos después), para reducir el deslizamiento de los primeros rodillos.
Los primeros rodillos 104 están alineados en un ángulo a (mostrado en la figura 3) relativo a la dirección de desplazamiento de la cinta transportadora 102, para desviar lateralmente objetos transportados por la cinta transportadora. A modo de ejemplo, a puede variar entre aproximadamente 1 y 89 grados. Puesto que los primeros rodillos 104 se utilizan para desviar objetos, los primeros rodillos pueden diseñarse como rodillos de desviación. La cadena Mat-Top 110 de la figura 1 incluye elementos para conectar otras cadenas Mat-Top 110 con el objeto de formar una cinta transportadora continua 102.
También haciendo referencia a la figura 1, el transportador 100 incluye asimismo una serie de segundos rodillos 106 y elementos de soporte 108. Los segundos rodillos 106 están situados por debajo de la cinta transportadora 102 entre los elementos de soporte 108, y pueden rotar libremente en una dirección que es transversal,...
Reivindicaciones:
1. Transportador (100) que comprende:
2. Transportador como el definido en la reivindicación 1, en el que dicho por lo menos un primer rodillo transversal (810) y dicho por lo menos un segundo rodillo transversal (810) están situados por debajo de la cinta transportadora, en el que dicho por lo menos un primer rodillo transversal rota en una dirección transversal a la dirección de rotación de los primeros rodillos de desvío cuando la cinta transportadora se desplaza, y en el que dicho por lo menos un segundo rodillo transversal rota en una dirección transversal a la dirección de rotación de los segundos rodillos de desvío.
3. Transportador como el definido en la reivindicación 1, en el que dicho por lo menos un primer rodillo transversal (810) rota en una primera dirección sustancialmente perpendicular a la dirección de desplazamiento de la correa cuando dicho por lo menos un primer rodillo transversal (810) se acopla con la serie de primeros rodillos de desvío (804).
4. Transportador como el definido en la reivindicación 3, en el que dicho por lo menos un segundo rodillo transversal (810) rota en una segunda dirección sustancialmente perpendicular a la dirección de desplazamiento de la correa cuando dicho por lo menos un segundo rodillo transversal se acopla con la serie de segundos rodillos de desvío (806).
5. Transportador como el definido en la reivindicación 1, en el que dicho por lo menos un primer rodillo transversal (810) y dicho por lo menos un segundo rodillo transversal (810) son desplazables verticalmente de manera selectiva, acercándose a la cinta transportadora o alejándose de la misma.
6. Transportador como el definido en la reivindicación 5, en el que cuando dicho por lo menos un primer rodillo transversal (810) es desplazado hacia la cinta transportadora y engrana con la serie de primeros rodillos de desvío (804), dicho por lo menos un primer rodillo transversal rota los primeros rodillos de desvío a medida que se desplaza la cinta transportadora, y en el que cuando dicho por lo menos un segundo rodillo transversal (810) es desplazado hacia la cinta transportadora y engrana con la serie de segundos rodillos de desvío (806), dicho por lo menos un segundo rodillo transversal rota los segundos rodillos de desvío a medida que se desplaza la cinta transportadora.
7. Transportador como el definido en la reivindicación 1, en el que los primeros rodillos de desvío (804) están alineados en las cavidades con un primer ángulo en relación con la dirección de desplazamiento de la cinta, permitiendo que los primeros rodillos de desvío transporten objetos en una primera dirección transversal a la dirección de desplazamiento de la cinta.
8. Transportador como el definido en la reivindicación 7, en el que los segundos rodillos de desvío (806) están alineados en las cavidades con un segundo ángulo en relación con la dirección de desplazamiento de la cinta, permitiendo que los segundos rodillos de desvío transporten objetos en una segunda dirección transversal a la dirección de desplazamiento de la cinta.
9. Un transportador, que comprende:
10. Un método para transportar objetos, comprendiendo el método:
11. Método como el definido en la reivindicación 10, en el que el acoplamiento de primeros rodillos de desvío (804) comprende desplazar verticalmente el primer rodillo transversal (810) hacia la cinta transportadora y engranar los primeros rodillos de desvío (804), y en el que el impulso de la cinta transportadora produce movimiento rotatorio tanto en los primeros rodillos de desvío como en los primeros rodillos transversales, como resultado del acoplamiento.
12. Método como el definido en la reivindicación 11, en el que el acoplamiento de segundos rodillos de desvío (806) comprende desplazar verticalmente el segundo rodillo transversal (810) hacia la cinta transportadora y engranar los segundos rodillos de desvío, y en el que el impulso de la cinta transportadora produce movimiento rotatorio tanto en los segundos rodillos de desvío como en los segundos rodillos transversales, como resultado del acoplamiento.
13. Método como el definido en la reivindicación 10, que comprende además rotar los primeros rodillos de desvío (804) en un primer ángulo que es diferente de la primera dirección.
14. Método como el definido en la reivindicación 13, que comprende además rotar los segundos rodillos de desvío (806) en un segundo ángulo que es diferente de la primera dirección y que es diferente del primer ángulo.
Patentes similares o relacionadas:
Retención de pasadores para módulos de transportador, del 1 de Julio de 2020, de HABASIT AG: Módulo de transportador , que comprende: un cuerpo de módulo , que comprende: un par de primeros extremos de eslabón […]
Cinta transportadora multieslabón con rodillos de rodadura, del 18 de Marzo de 2020, de KRONES AG: Cinta transportadora multieslabón para el transporte de objetos, como recipientes, botellas, envases o similares, que está formada por una pluralidad […]
Módulo híbrido para cinta transportadora modular, del 12 de Febrero de 2020, de HABASIT AG: Módulo híbrido para una cinta transportadora modular , que comprende: una sección de puente (30; 170; 230; 330; 355; 420; 470; […]
Módulo de cinta transportadora magnética, del 28 de Enero de 2019, de LAITRAM L.L.C.: Un módulo de cinta transportadora que comprende: un cuerpo de módulo que se extiende longitudinalmente en la dirección de desplazamiento de […]
Un eslabón para una cadena transportadora, una cadena transportadora compuesta por dichos eslabones y un procedimiento de operación de dicha cadena transportadora, del 8 de Marzo de 2017, de Flexmove System (m) Sdn.bhd: Un eslabón de cadena transportadora adaptado para ser interconectado con otros de dichos eslabones formando una cadena transportadora, […]
Módulo modular de cinta, del 14 de Septiembre de 2016, de AMMERAAL BELTECH MODULAR A/S (100.0%): Módulo de eslabón modular de cinta que consiste en un elemento de cuerpo principal y un inserto , donde el módulo de eslabón modular de […]
Módulo de cinta transportadora, del 14 de Septiembre de 2016, de AMMERAAL BELTECH MODULAR A/S (100.0%): Un módulo de cinta transportadora del tipo que tiene partes del ojal (2, 2', 3, 4) que sobresalen hacia fuera desde ambos lados de una parte central […]
Cadena transportadora, del 29 de Junio de 2016, de KRONES AG: Cinta transportadora , en particular para un pasteurizador , con una superficie de transporte y con rodillos de soporte que están dispuestos por debajo […]