APARATO MANIPULADOR DE CARGAS PERFECCIONADO.
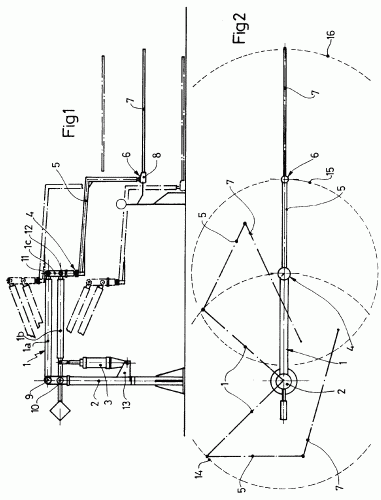
APARATO MANIPULADOR DE CARGAS PERFECCIONADO, DE LOS QUE COMPRENDEN UN PEDESTAL GIRATORIO (2) CAPAZ DE GIRAR 360G Y QUE TIENE UNIDA UNA PLUMA (1) LA CUAL EN SU PLANO VERTICAL ES SUSCEPTIBLE DE ARTICULARSE ANGULARMENTE RESPECTO DEL PEDESTAL GIRATORIO (2) Y ESTA ESTRUCTURADA A MODO DE PARALELOGRAMO ARTICULADO DEFORMABLE FORMADO MEDIANTE DOS PARALELAS BARRAS RADIALES,
SUPERIOR (1A) E INFERIOR (1B), ARTICULADAS POR UN EXTREMO A DICHO PEDESTAL GIRATORIO (2) Y POR EL OTRO EXTREMO A UNA BARRA SUSPENSORA (1C) ENCARGADA DEL HECHO MATERIAL DE SUSPENDER LA CARGA A MANIPULAR, CARACTERIZADO PORQUE LA RELACION MECANICA ENTRE LA PLUMA (1) Y ELPEDESTAL GIRATORIO (2) SE ESTABLECE MEDIANTE ARTICULACIONES (9) Y (10) QUE OCUPAN POSICIONES FIJAS SOBRE EL EJE DE GIRO DEL PEDESTAL (2) Y MEDIANTE UN CILINDRO DE FLUIDO (3) QUE TIENE SU CUERPO UNIDO ARTICULADAMENTE AL PEDESTAL GIRATORIO (2) Y SU VASTAGO ARTICULADO SOBRE EL BRAZO INFERIOR (1B) POR DELANTE DE DICHA ARTICULACION (10); Y PORQUE EN EL EXTREMO INFERIOR DE DICHA BARRA SUSPENSORA (1C) ESTA ESTABLECIDO UN PRIMER ACOPLAMIENTO GIRATORIO DE 360G (4) PARA UN RIGIDO BRAZO ALARGADOR ACODADO (5) QUE EN SU EXTREMO TIENE A SU VEZ ESTABLECIDO UN SEGUNDO ACOPLAMIENTO GIRATORIO DE 360G (6) PARA APLICAR UNA CARGA O UNA MENSULA (7) SOBRE LA QUE PUEDE SER POSICIONADO UN UTILLAJE PARA EL MANEJO DE LA MISMA.
Tipo: Resumen de patente/invención.
Solicitante: SAENZ ARAMBURU, MARIANO.
Nacionalidad solicitante: España.
Provincia: GUIPÚZCOA.
Fecha de Solicitud: 3 de Mayo de 1989.
Fecha de Publicación: .
Fecha de Concesión: 30 de Marzo de 1990.
Clasificación Internacional de Patentes:
- B25J3/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 3/00 Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio. › dotados de un acoplamiento en paralelogramo entre la unidad de control y la unidad controlada (pantógrafos B43L 13/00).
Patentes similares o relacionadas:
 Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]
Exoesqueleto robótico para movimiento de un miembro, del 23 de Julio de 2014, de QUEEN'S UNIVERSITY AT KINGSTON: Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, […]