Aparato de control de motor.
Un aparato de control de motor que comprende:
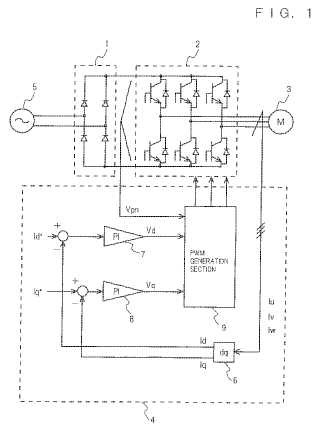
un circuito inversor (2) que recibe un voltaje fluctuante,
convierte dicho voltaje en un voltaje deseado y envía dicho voltaje deseado a un motor sin escobillas (3), estando dicho aparato de control de motor configurado para aplicar el voltaje a dicho motor sin escobillas en un estado de fase mantenida, y
una sección de control (4) que recibe un voltaje de entrada (Vpn) a dicho circuito inversor, una corriente del motor (lu, lv, lw) que fluye a dicho motor sin escobillas y un valor de orden de corriente del motor (ld*, lq*) que indica el 10 valor de una corriente requerido para fluir a dicho circuito inversor, y genera un valor de orden de voltaje de aplicación al motor (Vd, Vq) para dicho circuito inversor, en el que,
dicha sección de control (4) incluye:
- una sección de conversión dq (6) que genera un valor de detección de corriente del motor de eje d y de eje q (ld, lq) a partir de dicha corriente del motor (lu, lv, lw),
- un controlador de integración de proporción (PI) (7, 8) de eje d y eje q que recibe un error entre dicho valor de detección de corriente del motor (ld, lq) y dicho valor de orden de corriente del motor (ld*, lq*), y genera un valor de 20 orden de voltaje de aplicación al motor de eje d y eje q (Vd, Vq) en base a dicho error, y
- una sección de generación PWM (9) que recibe dicho valor de orden de voltaje de aplicación al motor (Vd, Vq) y dicho voltaje de entrada (Vpn), y envía una señal PWM correspondiente a dicho valor de orden de voltaje de aplicación al motor (Vd, Vq) a dicho circuito inversor (2), y en el que
dicho aparato de control de motor está configurado para aplicar el voltaje a dicho motor sin escobillas en un estado de fase mantenida, y caracterizado porque dicha sección de generación PWM (9) comprende:
- una sección de conversión dq inversa (10) que genera valores de orden de voltaje sinusoidal trifásico (Vu, Vv, Vw) en base a dicho valor de orden de voltaje de aplicación al motor (Vd, Vq),
- una sección de modulación línea a línea (11) que detecta un valor mínimo a partir de dichos valores de orden de voltaje sinusoidal trifásico (Vu, Vv y Vw) y envía los resultados obtenidos restando dicho valor mínimo de dichos valores de orden de voltaje sinusoidal trifásico, y
- una sección de corrección Vpn (12) que genera una señal PWM a partir de las salidas (Vu',Vv',Vw') de dicha sección de modulación línea a línea (11) y dicho voltaje de entrada (Vpn), y que detecta el valor máximo de dichas salidas (Vu',Vv',Vw') de dicha sección de modulación línea a línea (11), compara entre dicho valor máximo (Vmax) y dicho voltaje de entrada (Vpn) a dicho circuito inversor, y como resultado de la comparación, cuando dicho voltaje de entrada es mayor que dicho valor máximo, genera una señal PWM usando una tasa de cada salida de dicha sección de modulación línea a línea (11) y dicho voltaje de entrada (Vpn), o cuando dicho voltaje de entrada es menor que o igual a dicho valor máximo, genera una señal PWM usando una tasa de cada salida de dicha sección de modulación línea a línea(11) y dicho valor máximo (Vmax).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07012734.
Solicitante: PANASONIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 1006, OAZA KADOMA KADOMA-SHI OSAKA 571-8501 JAPON.
Inventor/es: UEDA, MITSUO, NAKATA, HIDEKI, OGAWA,MASANORI, KAWAJI,MITSUO, SUGIMOTO,TOMOHIRO, MATSUHIRO,HIDEO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P21/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo.
- H02P27/06 H02P […] › H02P 27/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de voltaje de alimentación (de dos o más motores H02P 5/00; de motores síncronos con conmutadores electrónicos H02P 6/00; de motores de corriente continua H02P 7/00; de motores paso a paso H02P 8/00). › utilizando inversores o convertidores CC-CA (H02P 27/05 tiene prioridad).
- H02P27/08 H02P 27/00 […] › con modulación del ancho de pulso.
- H02P29/02 H02P […] › H02P 29/00 Disposiciones para la regulación o el control de motores eléctricos, apropiadas tanto para motores de corriente alterna como de corriente continua (disposiciones para el arranque de motores eléctricos H02P 1/00; disposiciones para detener o ralentizar motores electricos H02P 3/00; control de motores que se pueden conectar a dos o más suministros diferentes de energía eléctrica H02P 4/00; regulación o control de la velocidad o el par de dos o más motores eléctricos H02P 5/00; control por vector H02P 21/00). › Protección contra sobrecargas sin interrupción automática de la alimentación (proteccion contra fallos de motores paso a paso H02P 8/36).
PDF original: ES-2425481_T3.pdf
Fragmento de la descripción:
DESCRIPCION Aparato de control de motor ANTECEDENTES DE LA INVENCION La presente invencion se refiere a un aparato de control de motor para controlar motores sin escobillas incorporados en climatizadores, frigorificos, lavadoras, sopladores, etc., usando un circuito inversor. La figura 33 es un diagrama de bloques que muestra la configuracion de un aparato de control de motor convencional para accionar un motor sin escobillas. En las siguientes descripciones, el aparato de control de motor convencional mostrado en la figura 33 se denomina una primera tecnologia convencional. En la figura 33, el numero 101 designa una fuente de alimentacion CA, el numero 102 designa un inductor, el numero 103 designa un diodo rectificador, el numero 104 designa un condensador de filtro, el numero 106 designa un circuito inversor, el numero 107 designa un motor sin escobillas, y el numero 108 designa un sensor de posicion. En el caso en el que el voltaje CA suministrado desde la fuente de alimentacion CA 101 es convertido en un voltaje CC usando el diodo rectificador 103 y el condensador de filtro 104 de modo que una potencia CC se introduce en el circuito inversor 106, la corriente suministrada desde la fuente de alimentacion CA 101 fluye solamente cuando el voltaje del condensador de filtro 104 es inferior al voltaje CA suministrado. Por lo tanto, la corriente suministrada desde la fuente de alimentacion CA 101 tiene componentes armonicos. Por lo tanto, en la primera tecnologia convencional, el inductor 102 esta provisto entre la fuente de alimentacion CA 101 y el diodo rectificador 103 para reducir los componentes armonicos y mejorar el factor de potencia. Tal como se ha descrito anteriormente, ademas del diodo rectificador 103, el inductor 102 y el condensador de filtro 104 se usan en el circuito rectificador 105 de la primera tecnologia convencional. Ademas, en el caso en el que el motor sin escobillas 107 es accionado por el inversor, se necesita la informacion del angulo de rotacion del rotor. Para este fin, en la primera tecnologia convencional, el angulo de rotacion se detecto usando el sensor de posicion 108. Como ejemplo de esta primera tecnologia convencional, se ha propuesto un aparato de control de motor desvelado en la Solicitud de Patente japonesa abierta a inspeccion publica numero Hei 9-74790. El inductor 102 y el condensador de filtro 104 del circuito rectificador 105 para uso en la primera tecnologia convencional son componentes grandes que tienen una inductancia grande y una capacitancia grande, respectivamente, en muchos casos. Como resultado, el aparato de control de motor convencional es frecuentemente apto para ser de tamano grande y precio alto. En el campo de los aparatos de control de motor, se ha demandado un circuito rectificador que incorpora componentes compactos como un inductor que tiene una inductancia pequena y un condensador que tiene una capacitancia pequena o un circuito rectificador que no incorpora estos componentes, desde el punto de vista de hacer el aparato de tamano mas pequeno y de menor coste. En esta situacion, dicho aparato de control de motor que no incorpora inductor ni condensador de filtro tal como se muestra en la figura 34, se ha propuesto como una segunda tecnologia convencional. Como un ejemplo de esta segunda tecnologia convencional, se ha propuesto un aparato de control de motor descrito en la Solicitud de Patente japonesa abierta a inspeccion publica numero Hei 10-150795. Dado que no se usa ningun condensador de filtro en la segunda tecnologia convencional, el voltaje de entrada suministrado al circuito inversor 106 no es un voltaje CC, sino un voltaje pulsatorio. Si este tipo de voltaje pulsatorio es introducido en el circuito inversor 106, cuando el voltaje de entrada suministrado al circuito inversor 106 es bajo, en algunos casos el circuito inversor 106 no puede generar un voltaje deseado para aplicarlo al motor sin escobillas 107. En el caso en el que el voltaje deseado no puede ser obtenido mediante la segunda tecnologia convencional, la fase del voltaje a aplicar al motor sin escobillas 107 se avanza. Avanzando la fase del voltaje a aplicar al motor sin escobillas 107, se puede obtener el denominado estado de campo debil, con lo que el voltaje requerido a aplicar al motor sin escobillas 107 puede hacerse mas bajo. Por lo tanto, con la segunda tecnologia convencional, el motor sin escobillas 107 puede ser accionado de forma continua incluso cuando el voltaje de entrada suministrado al circuito inversor 106 es bajo. Sin embargo, en la segunda tecnologia convencional, en el caso en el que el voltaje de entrada suministrado al circuito inversor 106 se convierte en un valor predeterminado o inferior, la operacion de conmutacion del circuito inversor 106 se detiene. Esto es porque el accionamiento del motor en el estado de campo debil es limitado. Tal como se ha descrito anteriormente, la segunda tecnologia convencional esta configurada de modo que no se aplique voltaje al motor sin escobillas 107 en el caso en el que el voltaje de entrada suministrado al circuito inversor 106 se vuelve el valor predeterminado o inferior. Ademas, se demanda un aparato de control de motor que no utilice un sensor de posicion desde el punto de vista de la fabricacion inalambrica y de reducir el coste. En esta situacion, un metodo de estimacion de la posicion de rotor de un motor sin escobillas detectando la corriente del motor se propone como una tercera tecnologia convencional. En
la tercera tecnologia convencional, la posicion de rotor del motor se estima usando una ecuacion de calculo para estimar la fase derivada en base a una ecuacion de voltaje de una corriente del motor, un voltaje aplicado al motor sin escobillas en el momento en que la corriente del motor fluye, y constantes de motor, tales como la resistencia, inductancia, etc., del motor sin escobillas. Un ejemplo de esta tercera tecnologia convencional se describe en una tesis quot;Control of a sensorless salient-pole brushless DC motor on the basis of estimation of speed electromotive force (Back EMF Estimation-Based Sensorless Salient-Pole brushless DC Motor Drives) quot; de Takeshita, Ichikawa, Lee y Matsui, Thesis Journal, Vol. 117-D, no 1, paginas 98 a 104, publicada por el Instituto de Ingenieros Electricos de Japon en 1997 (T.IEE Japon, Vol.117-D, no 1, 97) .
Tal como se ha descrito anteriormente, en la primera tecnologia convencional, la posicion de rotor de un motor sin escobillas se detecta usando un sensor de posicion, y se usan un inductor y un condensador de filtro para convertir el voltaje de entrada suministrado a un circuito inversor en un voltaje CC. Por lo tanto, dado que el inductor y el condensador de filtro son componentes grandes que tienen una inductancia grande y una capacitancia grande, respectivamente, es dificil hacer mas pequeno el aparato de control de motor que incorpora estos componentes.
Ademas, la segunda tecnologia convencional es un aparato de control de motor, en el que la posicion de rotor de un motor sin escobillas es detectada usando un sensor de posicion, sin usar componentes grandes tales como un inductor y un condensador de filtro. Esta tecnologia es efectiva de este modo desde el punto de vista de hacer el aparato de menor tamano y de menor coste. Sin embargo, dado que el voltaje de entrada suministrado al circuito inversor es pulsado en la segunda tecnologia convencional, esto origina el problema de detener la aplicacion de voltaje al motor sin escobillas cuando el voltaje de entrada es un valor predeterminado o inferior.
Se produce un problema descrito a continuacion en el caso en el que se intenta construir un aparato de control de motor sin sensores de tamano mas pequeno y de menor coste, combinando la segunda tecnologia convencional configurada para no usar inductor ni condensador de filtro con la tercera tecnologia convencional configurada para llevar a cabo accionamiento del motor sin sensores. En el aparato de control de motor que tiene este tipo de configuracion, la posicion de rotor no puede ser estimada en los periodos durante los cuales la aplicacion de voltaje al motor sin escobillas esta detenida. Por lo tanto, era imposible el accionamiento sin sensores del motor sin escobillas. En otras palabras, en el caso en el que el voltaje de entrada suministrado al circuito inversor es pulsado, no se puede construir un aparato de control de motor sin sensores mediante la simple combinacion de la segunda tecnologia convencional y la tercera tecnologia convencional.
P. Foussier en su tesis con el titulo quot;Contribution a l'integration des systemes de commande des machines electriques a courant alternatiff, tesis del Instituto Nacional de Ciencias Aplicadas de Lyon, 1 de enero de 1998, accesible en http://docinsa-insa-tyon.fr/these/1998/foussier/these.pdf, desvela un aparato de control de motor que comprende un circuito inversor que recibe un voltaje... [Seguir leyendo]
Reivindicaciones:
1. Un aparato de control de motor que comprende:
un circuito inversor (2) que recibe un voltaje fluctuante, convierte dicho voltaje en un voltaje deseado y envia dicho voltaje deseado a un motor sin escobillas (3) , estando dicho aparato de control de motor configurado para aplicar el voltaje a dicho motor sin escobillas en un estado de fase mantenida, y
una seccion de control (4) que recibe un voltaje de entrada (Vpn) a dicho circuito inversor, una corriente del motor (lu, lv, lw) que fluye a dicho motor sin escobillas y un valor de orden de corriente del motor (ld*, lq*) que indica el valor de una corriente requerido para fluir a dicho circuito inversor, y genera un valor de orden de voltaje de aplicacion al motor (Vd, Vq) para dicho circuito inversor, en el que,
dicha seccion de control (4) incluye:
- una seccion de conversion dq (6) que genera un valor de deteccion de corriente del motor de eje d y de eje q (ld, lq) a partir de dicha corriente del motor (lu, lv, lw) ,
-un controlador de integracion de proporcion (PI) (7, 8) de eje d y eje q que recibe un error entre dicho valor de deteccion de corriente del motor (ld, lq) y dicho valor de orden de corriente del motor (ld*, lq*) , y genera un valor de orden de voltaje de aplicacion al motor de eje d y eje q (Vd, Vq) en base a dicho error, y
-una seccion de generacion PWM (9) que recibe dicho valor de orden de voltaje de aplicacion al motor (Vd, Vq) y dicho voltaje de entrada (Vpn) , y envia una senal PWM correspondiente a dicho valor de orden de voltaje de aplicacion al motor (Vd, Vq) a dicho circuito inversor (2) , y en el que
dicho aparato de control de motor esta configurado para aplicar el voltaje a dicho motor sin escobillas en un estado de fase mantenida, y caracterizado porque dicha seccion de generacion PWM (9) comprende:
-una seccion de conversion dq inversa (10) que genera valores de orden de voltaje sinusoidal trifasico (Vu, Vv, Vw) en base a dicho valor de orden de voltaje de aplicacion al motor (Vd, Vq) ,
-una seccion de modulacion linea a linea (11) que detecta un valor minimo a partir de dichos valores de orden de voltaje sinusoidal trifasico (Vu, Vv y Vw) y envia los resultados obtenidos restando dicho valor minimo de dichos valores de orden de voltaje sinusoidal trifasico, y
-una seccion de correccion Vpn (12) que genera una senal PWM a partir de las salidas (Vu', Vv', Vw') de dicha seccion de modulacion linea a linea (11) y dicho voltaje de entrada (Vpn) , y que detecta el valor maximo de dichas salidas (Vu', Vv', Vw') de dicha seccion de modulacion linea a linea (11) , compara entre dicho valor maximo (Vmax) y dicho voltaje de entrada (Vpn) a dicho circuito inversor, y como resultado de la comparacion, cuando dicho voltaje de entrada es mayor que dicho valor maximo, genera una senal PWM usando una tasa de cada salida de dicha seccion de modulacion linea a linea (11) y dicho voltaje de entrada (Vpn) , o cuando dicho voltaje de entrada es menor que o igual a dicho valor maximo, genera una senal PWM usando una tasa de cada salida de dicha seccion de modulacion linea a linea (11) y dicho valor maximo (Vmax) .
2. El aparato de control de motor segun la reivindicacion 1, en el que dicha seccion de control estima la fase de rotacion de dicho motor sin escobillas en base a dicho valor de deteccion de corriente del motor (ld, lq) y dicho valor de orden de voltaje de aplicacion al motor (Vd, Vq) .
3. El aparato de control de motor segun la reivindicacion 1, en el que dicho controlador de integracion de proporcion (7, 8) genera dicho valor de orden de voltaje de aplicacion al motor (Vd, Vq) realizando una operacion de integracion de proporcion usando el error entre dicho valor de orden de corriente del motor (ld*, lq*) y dicho valor de deteccion de corriente del motor (ld, lq) , y envia dicho valor de orden de voltaje de aplicacion al motor (Vd, Vq) a dicha seccion de generacion PWM (9b) , y dicha seccion de generacion PWM (9b) esta configurada de modo que dicho controlador de integracion de proporcion detiene el funcionamiento integral cuando el voltaje de entrada a aplicar a dicho circuito inversor es menor que o igual a dicho valor maximo.
4. El aparato de control de motor segun la reivindicacion 1, en el que -
la seccion de conversion dq (6) calcula un valor de deteccion de corriente de eje d y un valor de deteccion de corriente de eje q usando la corriente del motor (lu, lv, lw) que fluye hasta dicho motor sin escobillas y la fase de rotacion () de un rotor de dicho motor sin escobillas, y en el que el controlador de integracion de proporcion de eje d (7) recibe el error entre un valor de orden de corriente de eje d (ld*) y dicho valor de deteccion de corriente de eje d (ld) y envia el valor estandar de una orden de tension de aplicacion a un motor de eje d, y en el que el controlador de integracion de proporcion de eje q (8) que recibe el error entre un valor de orden de corriente de eje q (lq*) y dicho valor de deteccion de corriente de eje q (lq) y envia el valor estandar de una orden de tension de aplicacion a un motor de eje q, y en el que la seccion de control (4) comprende ademas:
-un multiplicador de eje d (18) que envia el resultado de la multiplicacion de dicho valor de deteccion de corriente de eje q (lq) , dichos componentes de eje q (Lq) de una inductancia de dicho motor sin escobillas, y la velocidad de rotacion (0) de dicho motor sin escobillas,
-un primer multiplicador de eje q (19) que envia el resultado de la multiplicacion de dicho valor de deteccion de corriente de eje d (ld) , componentes de eje d (Ld) de una inductancia de dicho motor sin escobillas, y la velocidad de rotacion (0) de dicho motor sin escobillas,
-un segundo multiplicador de eje q (20) que envia el resultado de la multiplicacion de la constante de voltaje inducido (Ke) de dicho motor sin escobillas y dicha velocidad de rotacion (0) ,
-un sumador de eje d que anade la salida de dicho multiplicador de eje d (18) a dicho valor estandar de dicha orden de tension de aplicacion a un motor de eje d y envia un valor de orden de voltaje de aplicacion al motor de eje d (Vd) ,
-un sumador de eje q que anade las salidas de dicho primer multiplicador de eje q (19) y dicho segundo multiplicador de eje q (20) a dicho valor estandar de la orden de tension de aplicacion a un motor de eje q y envia un valor de orden de voltaje de aplicacion al motor de eje q (Vq) ,
-una seccion de generacion PWM (9) que recibe dicho valor de orden de voltaje de aplicacion al motor de eje d (Vd) y dicho valor de orden de voltaje de aplicacion al motor de eje q (Vq) y envia una senal de accionamiento de dicho circuito inversor.
5. El aparato de control de motor segun la reivindicacion 1, en el que dicha seccion de control detecta el voltaje de entrada a aplicar a dicho circuito inversor, estima un voltaje a introducir en dicho circuito inversor en el siguiente ciclo de control en base al valor de deteccion y controla dicho circuito inversor.
6. El aparato de control de motor segun la reivindicacion 1, que incorpora un condensador en el lado de entrada de dicho circuito inversor, en el que se establece que
C º 2 x 10-7 x P suponiendo que la capacitancia de dicho condensador es C [F] y que la salida maxima de dicho motor es P [W].
7. El aparato de control de motor segun la reivindicacion 1, que incorpora un inductor en el lado de entrada de dicho circuito inversor, en el que se establece que
L º 9 x 10-9 / C suponiendo que la inductancia de dicho inductor es L [H] y que la capacitancia de dicho condensador es C [F].
8. El aparato de control de motor segun la reivindicacion 1, que comprende ademas: un circuito elevador que tiene un inductor, diodos, dispositivos de conmutacion y un condensador, y una seccion de control del circuito elevador para controlar dicho circuito elevador, en el que
dicha seccion de control del circuito elevador determina el valor de orden para dicho dispositivo de conmutacion en base a una senal procedente de dicha seccion de control.
9. El aparato de control de motor segun la reivindicacion 8, en el que dicha seccion de control del circuito elevador, que esta configurada para recibir la fase de voltaje detectada y corriente CA de una fuente de alimentacion CA, comprende:
-una seccion de orden de corriente CA que envia un valor de orden de corriente CA en base a dicha fase detectada y una senal de control procedente de dicha seccion de control, y
-una seccion de generacion de orden PWM que genera valores de orden PWM para accionar dichos dispositivos de conmutacion en base a dicho valor de orden de corriente CA y dicha corriente CA detectada de dicha fuente de alimentacion CA y envia dichos valores de orden PWM.
10. El aparato de control de motor segun la reivindicacion 1, que comprende ademas:
-un circuito elevador que tiene un inductor en el que se introduce un voltaje fluctuante, -a partir de diodos que forman un circuito rectificador, dispositivos de conmutacion conectados a dicho circuito rectificador y que realizan una operacion de encendido/apagado, y un condensador que envia un voltaje elevado, y
- una seccion de control del circuito elevador para controlar dicho circuito elevador.
11. El aparato de control de motor segun la reivindicacion 7, en el que un inductor esta conectado al lado de entrada del circuito inversor, y se establece
L º P x 10-6 suponiendo que la inductancia de dicho inductor es L [H] y que la potencia de salida maxima de dicho es P [W].
12. Un compresor que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
13. Un climatizador que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
14. Un frigorifico que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
15. Una lavadora electrica que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
16. Una secadora electrica que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
17. Un soplador que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
18. Una aspiradora electrica que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
19. Un calentador de agua de bomba de calor que incorpora dicho aparato de control de motor segun una cualquiera de las reivindicaciones 1 a 11.
Patentes similares o relacionadas:
Dispositivo de control de un inversor, del 13 de Mayo de 2020, de LSIS Co., Ltd: Un dispositivo de control del inversor configurado para modificar un voltaje de referencia basado en vectores en un voltaje modificado basado en vectores y para suministrar […]
Método para controlar un inversor, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un método para controlar un inversor que realiza una optimización de salida de un motor en una sección por encima de la velocidad […]
Aparato para estimar parámetros en un motor de inducción, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un aparato para estimar un parámetro de un motor de inducción que incluye un controlador de corriente que emite tensiones de los ejes […]
Aparato de control de vectores sin sensor para motor de inducción, del 22 de Abril de 2020, de LSIS Co., Ltd: Un aparato de control de vectores sin sensor para controlar un motor de induccion, el aparato caracterizado por: un controlador de corriente que se configura […]
Aparato para estimar un parámetro en un motor de inducción, del 25 de Marzo de 2020, de LSIS Co., Ltd: Un aparato para estimar un parámetro de un motor de inducción que incluye un controlador de corriente que emite tensiones de los ejes d y q en un […]
Dispositivo de reducción de consumo de energía, del 26 de Febrero de 2020, de DAIKIN INDUSTRIES, LTD.: Dispositivo de reducción de consumo de energía que comprende: una parte de generación de energía; una parte de detección […]
Aparato para compensar un error de fase en un voltaje de salida del inversor, del 20 de Noviembre de 2019, de LSIS Co., Ltd: Un aparato de compensacion de fase en un voltaje de linea a linea en un sistema que incluye un inversor configurado para suministrar un voltaje a un motor , un controlador […]
DISPOSITIVO Y PROCEDIMIENTO DE DETERMINACIÓN DEL PAR, LA VELOCIDAD Y LAS PÉRDIDAS ENERGÉTICAS DE MOTORES ELÉCTRICOS ASÍNCRONOS TRIFÁSICOS, del 24 de Octubre de 2019, de UNIVERSITAT POLITECNICA DE VALENCIA: La invención describe un procedimiento y un dispositivo novedosos para la determinación del par, la velocidad y las pérdidas energéticas de motores eléctricos […]