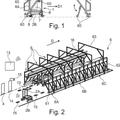
Un aparato (10) de clasificación para clasificar productos que comprende un sistema (3) de suministro para proporcionar productos (1) en una corriente continua a una tolva (P),
comprendiendo dicha tolva un primer elemento (P1) de guiado que tiene una superficie curvada, caracterizado porque la curvatura de dicha superficie está conformada cóncava en la dirección gravitacional de modo que, en uso, dichos productos (1) dejan dicho primer elemento (P1) de guiado en una dirección que es igual a la dirección horizontal o está por debajo de la misma, en el que dicha tolva guía dichos productos suministrados (1'), mientras se mueven por gravedad, hacia un sistema (6, 6') de detección y al menos un sistema (8) de eliminación, estando configurado dicho sistema de detección para detectar productos de menor calidad o cuerpos extraños, y estando configurado dicho sistema de eliminación para eliminar dichos productos de menor calidad o dichos cuerpos extraños, estando colocado dicho sistema (6, 6') de eliminación para analizar dichos productos (1') cuando se propagan en una dirección esencialmente vertical, después de que dichos productos han salido de la tolva (P)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06114035.
B07C5/36TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › Aparatos clasificadores caracterizados por los medios que utilizan en vista de la distribución.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
La presente invención versa acerca de un aparato de clasificación que comprende una tolva, estando dotada dicha tolva de una superficie inclinada para el guiado de productos, en particular productos granulares, hacia un sistema de detección y selección del aparato de clasificación mientras se mueven por influencia de la gravedad. Estado de la técnica En la patente europea EP0952895 se da a conocer un aparato de clasificación para la clasificación de productos granulares. Este aparato de clasificación comprende un sistema de detección, un sistema de eliminación y un dispositivo de transporte que tiene una superficie inclinada de distribución que es convexa a lo largo de al menos cierta distancia en la dirección del recorrido de los productos granulares. Este dispositivo de transporte guía a los productos hacia el sistema de detección y eliminación, de modo que los productos son analizados y seleccionados mientras se mueven en una dirección vertical descendente. La curvatura de esta superficie convexa de distribución es igual o ligeramente menor que la curvatura del recorrido que seguirían los productos que caen si esta superficie convexa de distribución estuviera ausente. Se reivindica que esta forma particular de la superficie de distribución fuerza a los productos que caen a seguir recorridos parabólicos sustancialmente congruentes, de modo que la posición y la velocidad de cada producto que cae están predeterminadas, haciendo por ello que el procedimiento de análisis y selección de los productos que caen resulte más fácil. Aunque esta forma convexa esté presente, sigue habiendo una gran variación en las trayectorias de los productos que caen, de modo que la separación entre el sistema de eliminación y los productos que caen no puede ser minimizada, resultando por ello en una eliminación no deseada de productos de calidad elevada. La variación en la trayectoria, es decir, la posición y la velocidad, de cada producto individual hace más difícil la sincronización del sistema de detección y del sistema de eliminación. Además, debido a la forma convexa de la superficie de distribución, resulta difícil estabilizar la orientación de los productos que caen hacia el sistema de detección, de modo que se ofrezca para su análisis un área proyectada máxima del producto. Ciertamente, si se están transportando productos duros, tales productos tienden a rebotar en la superficie de distribución, siguiendo por ello un recorrido que se desvía del recorrido parabólico congruente deseado. Los productos que tienen una trayectoria que difiere del recorrido congruente medio de la corriente de productos pueden depositarse sobre el sistema de detección y, en consecuencia, la calidad del sistema de detección puede verse afectada. La patente alemana DE19708457da a conocer otro aparato de clasificación. Este aparato de clasificación también comprende un sistema de detección, un sistema de eliminación y una tolva que tiene una superficie curvada con forma de trampolín de esquí dotado de un aumento monótono de la curvatura de esta superficie hacia el sistema de detección. Esta tolva proyecta los productos en una dirección ascendente hacia el sistema de detección y eliminación, de modo que los productos son analizados y seleccionados mientras se mueven en una dirección de avance horizontal. Se reivindica que, mientras descienden deslizándose a lo largo de la superficie curvada de la tolva, la posición de los productos está estabilizada debido a las fuerzas centrífugas que actúan sobre los mismos. Aunque puede obtenerse una corriente de productos más estable, la proyección de los productos en una dirección ascendente cuando salen de la tolva introduce variación en la trayectoria de los productos proyectados que hace más complejo y menos selectivo el procedimiento subsiguiente de análisis y eliminación. También aquí, la posición del sistema de detección lo convierte en más propenso a ser ensuciado por los productos que tienen una trayectoria que difiere del recorrido medio de la corriente de productos y, en consecuencia, la calidad del sistema de detección puede verse afectada. La patente canadiense CA 1 158 748 da a conocer un aparato un procedimiento para clasificar partículas de materiales radiactivos. El aparato comprende un alimentador para disponer las partículas radiactivas en una línea y para descargar las partículas así dispuestas en una trayectoria normal acelerada por la gravedad haciendo que se deslicen por una plancha deslizante fija convexa de baja fricción. El aparato comprende, además, medios para detectar la velocidad y la posición de cada partícula individual cuando está siendo dispuesta y medios para detectar las propiedades radiactivas de las partículas cuando están siendo descargadas por la plancha deslizante. La patente estadounidense US 6640158B1 está relacionada con un aparato para empaquetar material sólido particulado que incluye una bandeja curvada desviable de pesado con un radio de curvatura dado para recibir un flujo continuo de material y descargar el material a lo largo de vías de descarga primera y segunda, dependiendo de una medida de la desviación de la bandeja. Objetivos de la invención La presente invención busca proporcionar una tolva que supera los problemas mencionados más arriba de las soluciones de la técnica anterior. En otro aspecto, la invención busca proporcionar un aparato de clasificación equipado con tal tolva. 2 E06114035 06-10-2011 Resumen de la invención La presente invención está relacionada con un aparato de clasificación según se da a conocer en las reivindicaciones adjuntas. El aparato de la invención comprende una tolva adaptada para el guiado de una corriente de productos, que se mueven por influencia de la gravedad en una dirección descendente esencialmente vertical que el permite el análisis y la selección de los productos en su caída libre. Puesto que los productos están estabilizados mientras se mueven a lo largo de la tolva, el procedimiento de selección puede llevarse a cabo con mayor precisión, reduciendo por ello la eliminación no deseada de buenos productos o la falta de eliminación de productos malos. La configuración de la tolva también ofrece mejor control sobre la trayectoria de los productos que caen, como puede minimizarse de la separación entre el sistema selector y la corriente de productos. En una primera realización de la invención se da a conocer una tolva que comprende un primer elemento de guiado. Este primer elemento de guiado tiene una superficie curvada hacia abajo en toda su longitud hacia el sistema de detección, es decir, a lo largo de la dirección en la que se propagan los productos. Si esta superficie está expresada por una función F1, ello significa en particular que, para la derivada segunda de esta función, se cumple que d 2 F 1 dx 2 0 en todo el ancho de dicho primer elemento de guiado. En una realización preferente, las dimensiones del primer elemento de guiado se seleccionan de los siguientes intervalos: la altura del primer elemento de guiado, medida entre el punto (I) y el punto (E), se selecciona del intervalo de 0,3 m a 0,8 m, y es, preferentemente, de aproximadamente 0,5 m, y la anchura del primer elemento de guiado, es decir, la distancia horizontal entre el punto (I) y el punto (E), se selecciona del intervalo de 0,05 m a 0,4 m, seleccionada preferentemente en el intervalo de 0,05 m a 0,2 m, y es, preferentemente, de aproximadamente 0,15 m, y el ángulo se selecciona del intervalo de 70 a 90 grados, seleccionado preferentemente del intervalo de 80 a 90 grados, siendo este ángulo, más preferentemente, de aproximadamente 90 grados, y el ángulo ß se selecciona del intervalo de 20 a 85 grados, seleccionado preferentemente del intervalo de 40 a 85 grados, siendo preferentemente de aproximadamente 80 grados. En otra realización la curvatura de este primer elemento de guiado puede ser descrita como una función B-spline F1 que tiene una secuencia de nudos dada por K1 = [0 0 0 0 l l l], en la que 0 es el origen, es un nudo corredizo que controla la curvatura y l es la dimensión horizontal del primer elemento de guiado, especificado adicionalmente por las siguientes restricciones: F1(0) = 0, F1(1) = h, F1() = y, DF1(1) = tan, DF1(0) = tanß. En el presente documento, DF1 denota la derivada primera. En una realización ventajosa, la tolva comprende, además del primer elemento de guiado, un segundo elemento de guiado. El segundo elemento de guiado tiene una superficie que está adaptada para redirigir los productos que son impulsados por el primer elemento de guiado hacia el segundo elemento de guiado y recibidos por el segundo elemento de guiado en una dirección descendente esencialmente vertical. La superficie del segundo elemento de guiado está curvada hacia arriba en al menos una cierta sección a lo largo del movimiento... [Seguir leyendo]
Reivindicaciones:
1. Un aparato (10) de clasificación para clasificar productos que comprende un sistema (3) de suministro para proporcionar productos (1) en una corriente continua a una tolva (P), comprendiendo dicha tolva un primer elemento (P1) de guiado que tiene una superficie curvada, caracterizado porque la curvatura de dicha superficie está conformada cóncava en la dirección gravitacional de modo que, en uso, dichos productos (1) dejan dicho primer elemento (P1) de guiado en una dirección que es igual a la dirección horizontal o está por debajo de la misma, en el que dicha tolva guía dichos productos suministrados (1), mientras se mueven por gravedad, hacia un sistema (6, 6) de detección y al menos un sistema (8) de eliminación, estando configurado dicho sistema de detección para detectar productos de menor calidad o cuerpos extraños, y estando configurado dicho sistema de eliminación para eliminar dichos productos de menor calidad o dichos cuerpos extraños, estando colocado dicho sistema (6, 6) de eliminación para analizar dichos productos (1) cuando se propagan en una dirección esencialmente vertical, después de que dichos productos han salido de la tolva (P). 2. El aparato de clasificación según la reivindicación 1 en el que dicha superficie cóncava, cuando se expresa mediante una función F1, tiene una derivada segunda de la función F1 que es igual o mayor que cero. 3. El aparato de clasificación de la reivindicación 2 en el que la curvatura de dicho primer elemento (P1) de guiado puede ser descrita por una función B-spline F1 que tiene una secuencia de nudos dada por K1 = [0 0 0 0 l l l l], en la que 0 es el origen, es un nudo corredizo que controla la curvatura y l es la dimensión horizontal de dicho primer elemento (P1) de guiado, especificada adicionalmente por las siguientes restricciones: F1(0) = 0, F1(1) = h, F1() = y, DF1(1) = tan, DF1(0) = tanß, correspondiendo F1(0) = 0 al extremo de dicho primer elemento (P1) de guiado en el que dichos productos (1) salen de dicho primer elemento de guiado, correspondiendo F1(1) = h al extremo de dicho primer elemento (P1) de guiado en el que dichos productos (1) entran en el primer elemento de guidado, correspondiendo F1() = y a la posición del nudo corredizo que controla la curvatura de dicho primer elemento de guiado, siendo DF1(1) = tan la derivada primera de la función F1 en el extremo de entrada de dicho primer elemento de guiado y siendo el ángulo indicativo de la pendiente del primer elemento (P1) de guiado en este extremo, y siendo DF1(0) = tanß la derivada primera de F1 en el extremo en el que se sale de dicho primer elemento de guiado y ß indicativa de la pendiente de dicho primer elemento (P1) de guiado en este extremo. 4. El aparato de clasificación según la reivindicación 3 en el que la derivada segunda de dicha función B-spline F1 es igual o mayor que cero. 5. El aparato de clasificación según cualquiera de las reivindicaciones previas en el que las dimensiones de dicho primer elemento (P1) de guidado de la tolva (P) se seleccionan de los siguientes intervalos: la altura de dicho primer elemento (P1) de guiado se selecciona del intervalo de 0,1 m a 1,2 m, la anchura de dicho primer elemento (P1) de guiado se selecciona del intervalo de 0,05 m a 0,4 m, el ángulo , indicativo de la pendiente de dicho primer elemento (P1) de guiado en el extremo en el que dichos productos (1) entran en dicho primer elemento (P1) de guiado, se selecciona del intervalo de 70 a 90 grados, y el ángulo ß, indicativo de la pendiente de dicho primer elemento (P1) de guiado en el extremo en el que dichos productos (1) salen de dicho primer elemento (P1) de guiado, se selecciona del intervalo de 20 a 85 grados. 6. El aparato de clasificación según cualquiera de las reivindicaciones precedentes que, además, comprende un segundo elemento (P2) de guiado, teniendo dicho segundo elemento (P2) de guiado una superficie adaptada para redirigir los productos (1) que son impulsados por dicho primer elemento (P1) de guiado hacia dicho segundo elemento (P2) de guiado en una dirección descendente esencialmente vertical. 7. El aparato de clasificación según la reivindicación 6 en el que la superficie de dicho segundo elemento (P2) de guiado es convexa en la dirección gravitacional sobre al menos cierta sección (P2A) a lo largo del movimiento de la corriente de productos, de modo que los productos (1) impulsados hacia dicha sección convexa (P2A) son redirigidos por dicha sección convexa (P2A) en una dirección descendente esencialmente vertical. 8. El aparato de clasificación según la reivindicación 7 en el que dicha corriente de productos (1), cuando es impulsada hacia dicha sección convexa (P2A), está caracterizada por un vector de velocidad media (V) y dicha superficie del segundo elemento (P2A) de guiado está conformada para que sea tangencial inicialmente a dicho vector de velocidad media (V). 9. El aparato de clasificación según cualquiera de las reivindicaciones 6 a 8 en el que dicho segundo elemento (P2) de guiado es convexo en toda su longitud. 11 E06114035 06-10-2011 10. El aparato de clasificación según cualquiera de las reivindicaciones 6 a 8 en el que dicho segundo elemento (P2) de guiado comprende, además, una sección cóncava (P2B) corriente arriba de la sección convexa (P2A). 11. El aparato de clasificación según cualquiera de las reivindicaciones 6 a 10 en el que las dimensiones de dicha tolva (P) se seleccionan de los siguientes intervalos: la altura de dicha tolva (P) se selecciona del intervalo de 0,1 m a 1,2 m, por lo que la altura de dicho primer elemento (P1) de guiado se selecciona del intervalo de 0,3 m a 0,8 m, y la altura de dicho segundo elemento (P2) de guiado se selecciona del intervalo de 0,05 m a 0,4 m, la anchura de dicha tolva (P) se selecciona del intervalo de 0,15 m a 0,7 m, por lo que la anchura de dicho primer elemento (P1) de guiado se selecciona del intervalo de 0,05 m a 0,4 m, y la anchura de dicho segundo elemento (P2) de guiado se selecciona del intervalo de 0,02 m a 0,3 m, el ángulo , indicativo de la pendiente de dicho primer elemento (P1) de guiado en el extremo en el que dichos productos (1) entran en dicho primer elemento (P1) de guiado, se selecciona del intervalo de 70 a 90 grados, y el ángulo ß, indicativo de la pendiente de dicho primer elemento (P1) de guiado en el extremo en el que dichos productos (1) salen de dicho primer elemento (P1) de guiado, se selecciona del intervalo de 20 a 80 grados. 12. El aparato de clasificación según cualquiera de las reivindicaciones precedentes en el que dicho primer elemento (P1) de guiado de dicha tolva (P) está colocado a un lado de dicha corriente de productos (1) y uno de dicho al menos un sistema (8) de eliminación está colocado al lado opuesto de dicha corriente de productos (1). 13. El aparato de clasificación según la reivindicación 12 que, además, comprende un segundo elemento (P2) de guiado según cualquiera de las reivindicaciones 6-11, estando colocado dicho segundo elemento (P2) de guiado en el lado opuesto de dicha corriente de productos (1). 12 E06114035 06-10-2011 13 E06114035 06-10-2011 14 E06114035 06-10-2011 E06114035 06-10-2011 16 E06114035 06-10-2011 17 E06114035 06-10-2011
Patentes similares o relacionadas:
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Clasificación de aleaciones de aluminio mediante valores de conductividad eléctrica, del 15 de Abril de 2020, de Hydro Aluminium Recyling Deutshland GmbH: Procedimiento para clasificar aleaciones de aluminio en chatarra de aluminio,
caracterizado por que
las chatarras de aluminio se suministran a una estación de medición, […]
Sistema para embalaje automático de revistas y periódicos para cada vendedor de prensa individual, del 12 de Febrero de 2020, de Klotzner, Stefan: Sistema para embalaje automático de revistas y periódicos que consta de:
- un módulo de suministro que se encuentra colocado al comienzo del sistema […]
Equipo modular y desmontable para la clasificación automática en bolsas de paquetes, del 29 de Enero de 2020, de SOLYSTIC: Equipo para la clasificación de paquetes que comprende un soporte de receptáculos y al menos un carro robot lanzadera móvil mandado en desplazamiento […]
Procedimiento y sistema para la reducción activa de aceitunas mal posicionadas en las máquinas deshuesadoras, rellenadoras y rodajadoras de aceitunas., del 25 de Noviembre de 2019, de MADUEÑO LUNA, Antonio: Procedimiento y sistema para la reducción de aceitunas mal posicionadas en las máquinas deshuesadoras, rellenadoras y rodajadoras de aceitunas (DRR). Esta invención […]
Aparato de transporte con correa de vacío, del 24 de Julio de 2019, de QUALYSENSE AG: Un aparato para transportar partículas , incluyendo el aparato:
una correa transportadora sinfín que tiene una pluralidad de […]
Dispositivo de selección para una máquina de elaboración de resortes y máquinas de elaboración de resortes provistas de dicho dispositivo de selección, del 10 de Julio de 2019, de Simplex Rapid S.r.l: El dispositivo de selección destinado a ser dispuesto aguas abajo de un dispositivo de elaboración de resortes de una máquina de elaboración de resortes, […]
Soporte de artículos para un aparato de clasificación, del 28 de Junio de 2019, de Compac Technologies Limited: Un soporte de artículos que comprende:
una parte de montaje adaptada para la conexión a un transportador,
un elemento de conexión conectado de manera […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Equipo modular y desmontable para la clasificación automática en bolsas de paquetes, del 29 de Enero de 2020, de SOLYSTIC: Equipo para la clasificación de paquetes que comprende un soporte de receptáculos y al menos un carro robot lanzadera móvil mandado en desplazamiento […]
Equipo modular y desmontable para la clasificación automática en bolsas de paquetes, del 29 de Enero de 2020, de SOLYSTIC: Equipo para la clasificación de paquetes que comprende un soporte de receptáculos y al menos un carro robot lanzadera móvil mandado en desplazamiento […]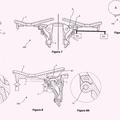 Soporte de artículos para un aparato de clasificación, del 28 de Junio de 2019, de Compac Technologies Limited: Un soporte de artículos que comprende:
una parte de montaje adaptada para la conexión a un transportador,
un elemento de conexión conectado de manera […]
Soporte de artículos para un aparato de clasificación, del 28 de Junio de 2019, de Compac Technologies Limited: Un soporte de artículos que comprende:
una parte de montaje adaptada para la conexión a un transportador,
un elemento de conexión conectado de manera […]