ACTUADOR REGULABLE EN FUERZA SIN RESTRICCION DE MOVIMIENTO, COMPUESTO DE DOS MOTORES ACOPLADOS MEDIANTE UN MECANISMO DIFERENCIAL, PARA SU USO EXPERIMENTAL EN MODELO FISICO A ESCALA Y EN PROTOTIPO.
1. Actuador regulable en fuerza sin restricción de movimiento,
compuesto de dos motores acoplados mediante un mecanismo diferencial, para su uso experimental en modelo físico a escala y en prototipo.
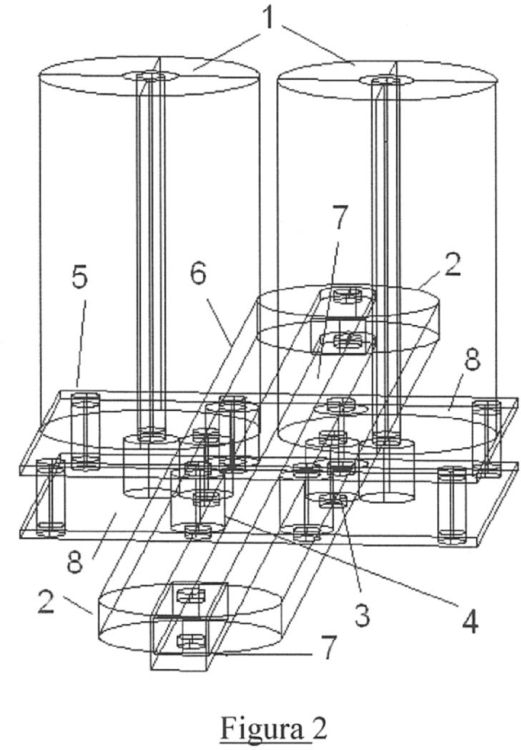
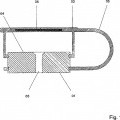
Un actuador que, en los ensayos de laboratorio sobre modelos físicos, permite aplicar una fuerza controlada, sin imponer restricciones de movimiento y que se compone de un conjunto de dos elementos motores, dos rodillos de presión, cuatro rodillos de guiado del vástago de aplicación de fuerza; de un mecanismo diferencial formado por dos poleas locas de ejes paralelos unidas por una banda sin fin de transmisión, que recibe la fuerza de los dos elementos motores tangencialmente a la banda sin fin, y un vástago de aplicación de fuerza de desplazamiento rectilíneo, sobre el que se fijan los ejes de las dos poleas locas constitutivas del mecanismo diferencial y a través de los cuales recibe la fuerza resultante del mecanismo diferencial, siendo dicho vástago el que aplica al modelo a ensayar la fuerza, al mismo tiempo que permite el movimiento libre del modelo.
Todos estos elementos se integran en un único objeto a través de una estructura soporte con los alojamientos necesarios y suficiente rigidez para soportar los elementos motores, mantener en su posición relativa los rodillos motores, rodillos compresores y las poleas locas del mecanismo diferencial mientras los rodillos guía permiten el desplazamiento del vástago actuador en la dirección marcada por el movimiento de la banda sin fin de transmisión, que es tangencial a los rodillos motores
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U200900413.
Solicitante: ECHEGOYEN MARTIN,TOMAS JOSE
AMOROS SERRET,JOSE RAMON.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: ECHEGOYEN MARTIN,TOMAS JOSE, AMOROS SERRET,JOSE RAMON.
Fecha de Solicitud: 3 de Marzo de 2009.
Fecha de Publicación: .
Fecha de Concesión: 4 de Febrero de 2010.
Clasificación PCT:
- G01M1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayo del equilibrado estático o dinámico de máquinas o estructuras.
Fragmento de la descripción:
Actuador regulable en fuerza sin restricción de movimiento, compuesto de dos motores acoplados mediante un mecanismo diferencial, para su uso experimental en modelo físico a escala y en prototipo.
Objeto de la invención
La presente invención, según se expresa en el enunciado de esta memoria descriptiva se refiere a un mecanismo actuador regulable en fuerza, el cual ha sido concebido y realizado en orden a obtener notables ventajas respecto a otros medios empleados en laboratorios de experimentación con análogas finalidades, al no imponer al mismo tiempo restricción de movimiento.
El mecanismo esta previsto para que sea capaz de accionar vástagos, o líneas de tiro, con una fuerza dada que se transmite por el elemento hasta su punto de aplicación, al cual se puede fijar una plancha metálica -para la generación de oleaje-, o cualquier otro elemento físico que deba excitarse con una fuerza dada controlable.
El mecanismo está previsto para que pueda sufrir un control en fuerzas, sin imponer restricción de movimiento, aunque también es posible hacerlo en velocidades o desplazamiento del vástago o línea de tiro. Todo ello se realiza sin ruidos primarios de regulación y manteniendo una característica de respuesta lineal, que no precisa de calibración.
Las escalas de los elementos empleados, su potencia y consumo, así como la naturaleza de la implementación del citado mecanismo diferencial (engranajes, cadenas, correas -dentadas o no-, bolas, o cualquiera de sus equivalentes) son dependientes de las magnitudes de la fuerza a reproducir, velocidades y desplazamientos.
Antecedentes de la invención
La invención se basa en la ciencia y técnica de ensayo de modelos físicos a través de acciones puntuales de leyes conocidas. Esta ciencia está ampliamente diseminada y es conocida por los profesionales que se dedican a estas tareas. No obstante, y derivando de estos principios, se plantea una nueva forma de actuadores para ensayos, regulables en fuerza y sin restricción de movimiento, que elimina gran parte de los inconvenientes que plantean los que se encuentran actualmente disponibles. Con el fin de comprobar tanto la existencia consolidada de la ciencia como de la técnica aplicada y la ausencia de soluciones en la línea de la invención propuesta se ha realizado una búsqueda lo más exhaustiva posible en las bases de datos de la Oficina Española de Patentes y Marcas, tanto para patentes nacionales como internacionales. De los resultados de las búsquedas, cuyos resultados se presentan en resumen, se puede deducir que hay aplicaciones de los elementos constitutivos de la invención presentada como elementos aislados, pero no las hay como un conjunto asociado para ninguna aplicación ni tampoco en la línea específica que se define como actuador de fuerzas para experimentación en modelo.
Para la realización de búsquedas en las bases de datos se ha elegido un conjunto de palabras significativo. La industria de la automoción introduce muchas de esas claves, aunque queda claro que no tienen relación con lo que la invención que se propone.
Elegidas palabras clave en el modelo de utilidad propuesto, principalmente por su destino: test*, experimentation*, laborator*, scale*, las búsquedas no devuelven ninguna referencia. Los resultados de las claves model* y test* producen referencias que no tienen nada que ver al ser totalmente diferentes en disposición y aplicación de los elementos, con la invención propuesta.
Las otras claves reflejantes del modelo elegidas han sido:
Differerential*, gear*, motor*, actuator*, assembly*, que combinadas de forma booleana con las primeras claves citadas, no devuelven ninguna referencia.
Se han buscado las siguientes combinaciones boolenas, en ESPACENET, European Patent Office, con los resultados que a continuación se exponen en resumen:
| Differential motor assembly sensor | 2 |
| Differential motor assembly gear | 665 |
| Differential motor gear sensor | 287 |
| Differential motor sensor model | 50 |
| Differential motor sensor experimentation | 0 |
| Differential motor sensor laboratory | 0 |
| Differential motor sensor force | 231 |
| Differential motor scale model | 12 |
| Differential motor scale model | 15 |
| Differential motor laboratory model | 1 |
| Differential gear laborator* model* | 0 |
| Differential gear pressur* model* | 64 |
| Differential gear pressur* test* | 50 |
| Differential gear test* port* | 30 |
| Differential gear test* harbour* | 0 |
| Differential gear model* port* | 39 |
| Differential gear* scale* experimentation* | 0 |
| Differential motor* scale* experimentation* | 0 |
| Differential motor* laborator* experimentation* | 0 |
| Differential actuator* laborator* experimentation* | 0 |
| Differential motor* laborator* experimentation* | 0 |
| Differential assembly* laborator* experimentation* | 0 |
| Differential gear* laborator* experimentation* | 0 |
| Differential gear* test* experimentation* | 0 |
| Motor* gear* test* experimentation* | 0 |
La búsqueda correspondiente a patentes y modelos de utilidad en el ámbito español se ha realizado de acuerdo con la sintaxis de búsqueda INTERPAT, con las combinaciones de las palabras clave consideradas definitorias del funcionamiento, características y destino de uso de la invención propuesta, sin encontrar resultados devueltos que fuesen comparables en uso, funcionamiento y aplicación al dispositivo propuesto.
Descripción de la invención
La invención consta de un medio de aplicación de fuerza a modelos físicos y prototipos compuesto por tres partes: a) un vástago que recibe la fuerza a aplicar de un dispositivo diferencial b) un mecanismo diferencial, compuesto por una banda de transmisión sin fin sobre dos poleas locas montadas sobre el vástago y que recibe la fuerza de dos motores, c) dos motores aplicados tangencialmente a la banda sin fin del mecanismo diferencial fijado al vástago.
En la práctica de ensayo de modelos físicos, cuando un actuador se intenta regular en fuerza con independencia de su velocidad y/o desplazamientos, las características físicas de los motores empleados presentan tales variaciones con respecto al punto de trabajo instantáneo que originan variaciones no predecibles de la función de fuerzas ejercida por el actuador.
La idea fundamental de la invención consiste que, a través de la aplicación de un mecanismo diferencial, con dos ejes de entrada y un dispositivo de salida, a dos motores giratorios, se introduce un grado de libertad cinemática que permite independizar los movimientos del dispositivo de salida de las fuerzas que ejerce, al tiempo que la marcha de los motores se puede ajustar con independencia en punto más conveniente de su curva característica, ajustando su respuesta en un tramo lineal y eliminando así el ruido primario de la regulación.
Específicamente, en motores/generadores asíncronos de corriente alterna, es posible fijar su frecuencia de rotación en un intervalo pequeño de la frecuencia de red o del sistema (deslizamiento), mientras que el actuador refleja la velocidad y desplazamiento correspondiente a las diferencias presentes entre los dos motores/generadores.
Reivindicaciones:
1. Actuador regulable en fuerza sin restricción de movimiento, compuesto de dos motores acoplados mediante un mecanismo diferencial, para su uso experimental en modelo físico a escala y en prototipo.
Un actuador que, en los ensayos de laboratorio sobre modelos físicos, permite aplicar una fuerza controlada, sin imponer restricciones de movimiento y que se compone de un conjunto de dos elementos motores, dos rodillos de presión, cuatro rodillos de guiado del vástago de aplicación de fuerza; de un mecanismo diferencial formado por dos poleas locas de ejes paralelos unidas por una banda sin fin de transmisión, que recibe la fuerza de los dos elementos motores tangencialmente a la banda sin fin, y un vástago de aplicación de fuerza de desplazamiento rectilíneo, sobre el que se fijan los ejes de las dos poleas locas constitutivas del mecanismo diferencial y a través de los cuales recibe la fuerza resultante del mecanismo diferencial, siendo dicho vástago el que aplica al modelo a ensayar la fuerza, al mismo tiempo que permite el movimiento libre del modelo.
Todos estos elementos se integran en un único objeto a través de una estructura soporte con los alojamientos necesarios y suficiente rigidez para soportar los elementos motores, mantener en su posición relativa los rodillos motores, rodillos compresores y las poleas locas del mecanismo diferencial mientras los rodillos guía permiten el desplazamiento del vástago actuador en la dirección marcada por el movimiento de la banda sin fin de transmisión, que es tangencial a los rodillos motores.
Patentes similares o relacionadas:
 Sistema y método de control de prueba de carga de unidad de elevación de máquina de soporte de vehículos, del 25 de Septiembre de 2019, de CRRC Qingdao Sifang Rolling Stock Research Institute Co., Ltd: Un sistema de prueba y control de prueba de carga de una unidad de elevación de elevador de vehículos, adecuado para su uso para someter a prueba una unidad […]
Sistema y método de control de prueba de carga de unidad de elevación de máquina de soporte de vehículos, del 25 de Septiembre de 2019, de CRRC Qingdao Sifang Rolling Stock Research Institute Co., Ltd: Un sistema de prueba y control de prueba de carga de una unidad de elevación de elevador de vehículos, adecuado para su uso para someter a prueba una unidad […]
Una máquina para el equilibrado de las ruedas de los vehículos, del 27 de Abril de 2016, de SICAM S.R.L.: Una máquina de equilibrado para el equilibrado de las ruedas, que comprende una estructura de soporte para soportar los medios de agarre y rotación […]
 Máquina de equilibrado para el equilibrado de las ruedas de un vehículo, del 30 de Marzo de 2016, de SICAM S.R.L.: Una máquina de equilibrado adaptada al equilibrado de las ruedas de un vehículo, que comprende una estructura de soporte adaptada para soportar los […]
Máquina de equilibrado para el equilibrado de las ruedas de un vehículo, del 30 de Marzo de 2016, de SICAM S.R.L.: Una máquina de equilibrado adaptada al equilibrado de las ruedas de un vehículo, que comprende una estructura de soporte adaptada para soportar los […]
 Aparato y método de simulación virtual para sillas de ruedas y programa de ordenador que implementa el método, del 1 de Diciembre de 2014, de UNIVERSITAT DE VALENCIA: Aparato y método de simulación virtual para silla de ruedas, y programa de ordenador que implementa el método.
El aparato comprende:
- una […]
Aparato y método de simulación virtual para sillas de ruedas y programa de ordenador que implementa el método, del 1 de Diciembre de 2014, de UNIVERSITAT DE VALENCIA: Aparato y método de simulación virtual para silla de ruedas, y programa de ordenador que implementa el método.
El aparato comprende:
- una […]
 Método de detección de combustión anormal para motores de combustión interna, del 7 de Junio de 2012, de INSTITUT FRANCAIS DU PETROLE: Método de detección de combustión anormal en la cámara de combustión de al menos un cilindro de un motor de combustión interna […]
Método de detección de combustión anormal para motores de combustión interna, del 7 de Junio de 2012, de INSTITUT FRANCAIS DU PETROLE: Método de detección de combustión anormal en la cámara de combustión de al menos un cilindro de un motor de combustión interna […]
SISTEMA PARA ENSAYOS MECANICOS DEL CONJUNTO EJE DE BAJA, BASTIDOR DELANTERO Y CORONA DE GIRO DE UN AEROGENERADOR., del 16 de Abril de 2007, de FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS: Sistema para ensayos mecánicos del conjunto eje de baja, bastidor delantero y corona de giro de un aerogenerador, que permite simular de forma simultánea […]
JUEGO DE CONTRAPESOS PARA PRUEBAS DE CARGA EN GRUAS TORRE., del 1 de Agosto de 2004, de VALLINA Y QUINCE, S.L.: 1. Juego de contrapesos para pruebas de carga en grúas torre, que esencialmente se caracteriza porque comprende un contrapeso base y una serie […]
 MARCACIÓN DE PUNTOS DE MEDIDA PARA EL RECONOCIMIENTO AUTOMÁTICO DE LOS MISMOS EN UN SISTEMA DE VIGILANCIA DE ESTADO, del 31 de Mayo de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Marcación de un punto de medida para el reconocimiento automático del mismo en un sistema de vigilancia de estado, caracterizada porque comprende una placa que puede […]
MARCACIÓN DE PUNTOS DE MEDIDA PARA EL RECONOCIMIENTO AUTOMÁTICO DE LOS MISMOS EN UN SISTEMA DE VIGILANCIA DE ESTADO, del 31 de Mayo de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Marcación de un punto de medida para el reconocimiento automático del mismo en un sistema de vigilancia de estado, caracterizada porque comprende una placa que puede […]