Actuador electromecánico para máquinas plegadoras.
Actuador electromecánico para máquinas plegadoras, que comprende:
- un cuerpo de cabida externo (13);
- un gusano (5) dispuesto dentro del cuerpo externo (13) y que presenta una superficie interna con rosca (9);- un vástago (2) en condiciones de ser asociado a una herramienta de plegado y que tiene una rosca (4) asociadaoperativamente dentro de dicho gusano (5); y
- medios motores (6) dispuestos en dicho cuerpo externo (13) para poner en rotación el gusano (5) alrededor de supropio eje longitudinal (X), dicha rotación del gusano (5) determinando el desplazamiento axial del vástago (2);
- por lo menos un tirante (20) fijado en dicho cuerpo de cabida (13) para absorber las cargas axiales (C) que vienenaplicadas al vástago (2) y medios (24) para transferir las cargas axiales (C) desde el vástago (2) hasta dicho tirante (20);caracterizado por el hecho que dicho tirante (20) está dispuesto en correspondencia de una porción de unión (18) delcuerpo externo (13) en condiciones de ser asociada a una brida de soporte (19) de una máquina plegadora, paratransferir las cargas (C) directamente a dicha porción de unión (18) y a dicha brida (19); dicho tirante (20), introducido enuna porción terminal (16) del cuerpo externo (13) asociada y próxima a la porción de unión (18), estando enroscado enuna tuerca (22) para trabajar por tracción y para cargar por compresión dicha porción terminal (16) del cuerpo externo(13).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2008/000651.
Solicitante: UMBRA CUSCINETTI S.P.A..
Nacionalidad solicitante: Italia.
Dirección: Z.I. Località Paciana 06034 Foligno (PG) ITALIA.
Inventor/es: PIZZONI, LUCIANO, PERNI, FEDERICO, Speziali,Stefano, BOSI,MASSIMILIANO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D5/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 5/00 Curvado de chapas a lo largo de líneas rectas, p. ej. para formar un pliegue simple (B21D 11/06 - B21D 11/18 tiene prioridad). › sobre prensas particulares sin fijación de la pieza.
- B30B1/18 B […] › B30 PRENSAS. › B30B PRENSAS EN GENERAL; PRENSAS NO PREVISTAS EN OTRO LUGAR (producción de las ultrapresiones o de ultrapresiones con temperaturas elevadas para obtener modificaciones en una sustancia, p. ej. para fabricar diamantes artificiales, B01J 3/00). › B30B 1/00 Prensas, que utilizan un elemento apisonador, caracterizadas por la forma de propulsión del pistón, siendo la presión transmitida a éste o a la platina de la prensa directamente o únicamente por medio de órganos que trabajan por simple impulso o tracción. › por sistemas de tornillo.
- F16H25/20 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 25/00 Transmisiones que implican esencialmente y únicamente sistemas de leva y ruleta o mecanismos de tornillo y tuerca. › Mecanismos de tornillo (con inversión automática F16H 25/12).
PDF original: ES-2392212_T3.pdf
Fragmento de la descripción:
Actuador electromecánico para máquinas plegadoras.
Campo Técnico
La presente invención se refiere a un actuador electromecánico para máquinas plegadoras.
Técnica Existente
Las máquinas plegadoras están provistas de una herramienta de plegado, soportada por el vástago de un respectivo actuador lineal que desplaza la herramienta hacia el cuerpo a plegar. Por ejemplo, en las plegadoras de láminas metálicas se emplean actuadores electromecánicos lineales con tornillos con bolas circulantes, en condiciones de mover la herramienta hacia la lámina a plegar.
Dichos actuadores están constituidos por un cuerpo tubular, conocido en el sector técnico en cuestión como gusano o tornillo sin fin, puesto en rotación alrededor de su propio eje longitudinal por un motor eléctrico. Dentro del gusano está dispuesto, coaxialmente, el vástago, configurado tipo tornillo y acoplado solidariamente con la herramienta de plegado.
En su propia superficie interna el gusano tiene apropiados asientos para una pluralidad de bolas en condiciones de girar sobre sí mismas y deslizarse por la garganta de la rosca del tornillo. La rotación del gusano determina, a través del acoplamiento logrado por las bolas, el deslizamiento del tornillo dentro del gusano a lo largo de su propio eje longitudinal y el consiguiente movimiento de la herramienta de doblado hacia el cuerpo a maquinar.
El actuador además comprende un cuerpo de cabida externo, en condiciones de contener el conjunto de accionamiento constituido por el motor eléctrico, el gusano y el vástago. Dicho cuerpo de cabida externo está vinculado solidariamente al bastidor de la plegadora por medio de apropiadas bridas de fijación y está dimensionado apropiadamente para soportar las cargas aplicadas por el actuador.
Cabe hacer notar que las cargas axiales que se aplican al vástago pasan a través de la esfera, atraviesan el gusano, los cojinetes, y vienen descargadas sobre el cuerpo externo. En el caso particular de actuadores utilizados en plegadoras para plegar láminas metálicas, las cargas axiales son muy elevadas, dada la fuerza axial ejercida sobre las láminas a plegar.
Por tal motivo, el cuerpo externo debe tener una sección muy grande y debe estar hecho de un material con características de alta resistencia mecánica, porque si así no fuera el cuerpo podría romperse o dañarse.
Por consiguiente, todo el actuador es muy pesado y grande con el consiguiente sobredimensionamiento de toda la plegadora.
Lamentablemente, el uso de materiales de alta resistencia para el cuerpo externo además determina un costo de producción muy elevado de todo el actuador.
El documento JP 2000 170.865 A, considerado la técnica conocida más cercana, publica todas las características del preámbulo de la reivindicación 1.
Revelación de la Invención
Un objetivo de la presente invención es el de resolver los problemas exhibidos por la técnica conocida, proponiendo un actuador electromecánico, en particular para plegadoras, capaz de eliminar dichos inconvenientes.
En particular, un objetivo de la presente invención es el de proporcionar un actuador electromecánico en condiciones de soportar las elevadas cargas axiales que se aplican al vástago y que se transfieren al cuerpo externo.
Otro objetivo de la presente invención es el de proponer un actuador electromecánico económico y sencillo estructuralmente, cuyos peso y tamaño sean reducidos.
Esos objetivos así como otros, que se pondrán mejor de manifiesto a lo largo de la descripción que sigue, se logran substancialmente mediante un actuador electromecánico para plegadoras con las características expresadas en una o varias de las reivindicaciones que están más adelante.
Descripción de los Dibujos
Otras ventajas y características se pondrán mejor de manifiesto a partir de la descripción detallada de una ejecución preferente pero no exclusiva de un actuador electromecánico para plegadoras de conformidad con la presente invención. A continuación se proporciona dicha descripción haciendo referencia a las figuras anexas, provistas a título puramente indicativo y no limitativo, en las cuales:
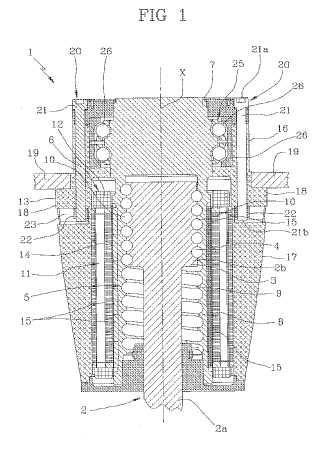
- la figura 1 muestra una vista en sección transversal de un actuador electromecánico para máquinas plegadoras; y
- la figura 2 muestra una vista amplificada de un detalle constructivo de la figura 1.
Descripción de la Ejecución Ejemplificadora
Haciendo referencia a las figuras anexas, el número de referencia 1 denota un actuador electromecánico, en su totalidad, según la presente invención. El actuador (1) halla especial aplicación en plegadoras para plegar láminas metálicas, no mostradas ni descritas en detalles puesto que son conocidas y no forman parte de la presente invención.
Sin embargo, cabe especificar que el actuador (1) puede ser empleado en cualquier otro sector en función de las diferentes necesidades de aplicación.
En el ejemplo de ejecución representado en este documento, el actuador (1) comprende un vástago (2) , en condiciones de ser asociado en correspondencia de una respectiva extremidad inferior (2a) a una herramienta de plegado (no exhibida en las figuras anexas) adecuada para procesos de plegado a efectuar sobre láminas metálicas.
El vástago (2) , que está provisto de una parte activa (3) dispuesta en correspondencia de una extremidad superior (2b) del mismo vástago (2) , tiene una forma substancialmente cilíndrica.
En la porción activa (3) se ha realizado una rosca (4) , asociada operativamente a la parte interna de un gusano
(5) que viene puesto en rotación alrededor de su propio eje longitudinal (X) a través de medios motores (6) , de tipo conocido y, por ende, exhibidos sólo esquemáticamente en la figura 1.
Con mayor nivel de detalles, el gusano (5) tiene forma substancialmente cilíndrica, es hueco en su interior y está definido por una porción de cabeza (7) y por una porción tubular (8) .
La porción tubular (8) posee un superficie interna con rosca (9) en condiciones de cooperar con la rosca (4) del vástago (2) para mover el mismo vástago (2) axialmente a lo largo del eje (X) durante la rotación del gusano (5) .
En particular, cabe hacer notar que entre la rosca del vástago (2) y la superficie con rosca (9) del gusano (5) hay una pluralidad de bolas móviles (10) . Ventajosamente, el actuador (1) posee medios para la recirculación de la pluralidad de bolas (10) , preferentemente obtenidos en la porción activa (3) del vástago (2) y no mostrados porque son conocidos en sí mismos.
Los medios motores (6) comprenden por lo menos un motor eléctrico (11) que presenta un estator (12) vinculado internamente a un cuerpo de cabida externo (13) (mejor descrito en lo que resta de la presente descripción) , y un rotor
(14) vinculado a dicho gusano (5) .
Ventajosamente, el estator (12) se extiende coaxialmente alrededor de la porción tubular (8) del gusano (5) , mientras que el rotor (14) se obtiene directamente sobre el gusano (5) . De este modo, el rotor (14) determina el movimiento directo del gusano (5) , determinando una configuración estructuralmente simple y compacta de todo el motor (11) .
Con mayor nivel de detalles, el rotor (14) está constituido por una pluralidad de imanes permanentes (15) dispuestos cercanos entre sí y asociados a la porción tubular (8) del gusano (5) .
El gusano (5) , el vástago (2) y los respectivos medios motores (6) están alojados dentro de dicho cuerpo de cabida externo (13) , cuya forma es substancialmente tubular.
En particular, el cuerpo externo (13) es obtenido por fundición de aluminio y está definido por una porción terminal (16) y por una porción de cabida (17) adyacente a la misma porción terminal (16) .
Más en particular, la porción terminal (16) está dispuesta superiormente y se extiende coaxialmente alrededor de dicha porción de cabeza (7) del gusano (5) . La porción de cabida (17) , por el contrario, se extiende alrededor de dicha porción tubular (8) del gusano (5) y del respectivo motor eléctrico (11) , para soportar el estator (12) del motor (11) .
Reivindicaciones:
1. Actuador electromecánico para máquinas plegadoras, que comprende:
- un cuerpo de cabida externo (13) ;
- un gusano (5) dispuesto dentro del cuerpo externo (13) y que presenta una superficie interna con rosca (9) ;
- un vástago (2) en condiciones de ser asociado a una herramienta de plegado y que tiene una rosca (4) asociada operativamente dentro de dicho gusano (5) ; y
- medios motores (6) dispuestos en dicho cuerpo externo (13) para poner en rotación el gusano (5) alrededor de su propio eje longitudinal (X) , dicha rotación del gusano (5) determinando el desplazamiento axial del vástago (2) ;
- por lo menos un tirante (20) fijado en dicho cuerpo de cabida (13) para absorber las cargas axiales (C) que vienen aplicadas al vástago (2) y medios (24) para transferir las cargas axiales (C) desde el vástago (2) hasta dicho tirante (20) ;
caracterizado por el hecho que dicho tirante (20) está dispuesto en correspondencia de una porción de unión (18) del cuerpo externo (13) en condiciones de ser asociada a una brida de soporte (19) de una máquina plegadora, para transferir las cargas (C) directamente a dicha porción de unión (18) y a dicha brida (19) ; dicho tirante (20) , introducido en una porción terminal (16) del cuerpo externo (13) asociada y próxima a la porción de unión (18) , estando enroscado en una tuerca (22) para trabajar por tracción y para cargar por compresión dicha porción terminal (16) del cuerpo externo (13) .
2. Actuador según la reivindicación 1, caracterizado por el hecho que dicho tirante (20) comprende un tornillo
(21) introducido en dicho cuerpo externo (13) y hecho de acero de alta resistencia.
3. Actuador según la reivindicación 1, caracterizado por el hecho que los medios (24) para transferir las cargas
(C) comprenden medios (25) para reducir la fricción intercalados entre el gusano (5) y la porción terminal (16) de dicho cuerpo externo (13) .
4. Actuador según la precedente reivindicación, caracterizado por el hecho que dichos medios (25) para reducir la fricción tienen por lo menos un cojinete de bolas (26) con un eje de rotación transversal al eje de rotación (X) del gusano (5) y coincidente con una dirección de transferencia de las cargas (C) desde el gusano (5) hasta dicho tirante (20) .
5. Actuador según la precedente reivindicación, caracterizado por el hecho que dichos medios (24) para transferir las cargas (C) además comprenden una porción de cabeza (7) del gusano (5) intercalada entre dicho cojinete de bolas (26) y una porción tubular (8) del gusano (5) que presenta dicha superficie con rosca (9) .
6. Actuador según la precedente reivindicación, caracterizado por el hecho que dichos medios (24) para transferir las cargas (C) además comprenden una pluralidad de bolas (10) móviles entre la rosca (4) del vástago (2) y la superficie con rosca (9) del gusano (8) .
7. Actuador según la precedente reivindicación, caracterizado por el hecho que además comprende medios para la recirculación de la pluralidad de bolas (10) .
8. Actuador según la precedente reivindicación, caracterizado por el hecho que dichos medios (24) para transferir las cargas (C) además comprenden una porción activa (3) del vástago (2) dispuesta del lado opuesto con respecto a la herramienta de plegado y que presenta dicha rosca (4) ; dichos medios de recirculación siendo obtenidos en dicha porción activa (3) del vástago (2) .
9. Actuador según una cualquiera de las precedentes reivindicaciones, caracterizado por el hecho que dichos medios motores (6) comprenden por lo menos un motor eléctrico (11) que tiene un estator (12) vinculado internamente a dicho cuerpo (13) y un rotor (14) vinculado a dicho gusano (5) .
10. Actuador según la precedente reivindicación, caracterizado por el hecho que dicho rotor (14) está hecho directamente en el gusano (5) .
11. Actuador según la reivindicación 9 cuando depende de una cualquiera de las reivindicaciones de 5 a 8, caracterizado por el hecho que dicho rotor (14) comprende una pluralidad de imanes permanentes (15) asociados a la porción tubular (8) del gusano (5) .
Patentes similares o relacionadas:
Accionamiento electromotriz de un mueble, del 6 de Mayo de 2020, de DewertOkin GmbH (100.0%): Accionamiento electromotriz de un mueble para un mueble reclinable o un mueble de asiento con un riel de guía y una unidad de eje de salida que se mueve […]
Sistema de suministro de energía undimotriz-eólica complementario para la generación de energía continua, del 8 de Enero de 2020, de Weng, Wen-kai: Sistema de suministro de energía undimotriz-eólica complementario para generación de energía continua, que comprende: un módulo de energía cinética de la ola , que […]
Servofreno y dispositivo de frenado con un servofreno de este tipo, del 2 de Octubre de 2019, de ROBERT BOSCH GMBH: Servofreno para un cilindro de freno principal de un vehículo a motor, con un motor de accionamiento , el cual está conectado o se puede conectar mediante […]
Sistema de tensado automatizado para transportador de cable o cadena, del 3 de Julio de 2019, de FLEXICON CORPORATION: Un sistema de tensado para un sistema de transporte con un elemento de tracción sin fin que se desplaza alrededor de […]
 Freno de servicio de vehículo con servo asistencia electromecánica e hidráulica de freno, del 29 de Mayo de 2019, de SFS INTEC HOLDING AG: Freno de servicio de vehículo activable electromecánicamente con un accionamiento lineal, en el que desde un actuador electromecánico […]
Freno de servicio de vehículo con servo asistencia electromecánica e hidráulica de freno, del 29 de Mayo de 2019, de SFS INTEC HOLDING AG: Freno de servicio de vehículo activable electromecánicamente con un accionamiento lineal, en el que desde un actuador electromecánico […]
Dispositivo de accionamiento dual de motor eléctrico, del 22 de Mayo de 2019, de DewertOkin GmbH (100.0%): Accionamiento dual de motor eléctrico para el desplazamiento de dos piezas de muebles diferentes de un mueble con dos unidades de accionamiento , […]
Dispositivo de detección de tope posterior en un accionador lineal, del 6 de Mayo de 2019, de VIRAX: Accionador lineal que consta de medios de accionamiento de un equipo móvil entre una posición de reposo y una posición activa, y un módulo electrónico […]
Transmisión para transformar un movimiento rotatorio en un movimiento lineal, del 17 de Abril de 2019, de Siemens Mobility GmbH: Transmisión para transformar un movimiento rotatorio en un movimiento lineal , sobre la que actúa una fuerza contraria (F) que actúa en la parte motriz, […]