6 inventos, patentes y modelos de NEGRE, BERNARD
Procedimiento de pilotaje de una estación de trabajo robotizada y estación de trabajo robotizada correspondiente.
Sección de la CIP Física
(21/11/2018). Ver ilustración. Solicitante/s: ABB FRANCE. Clasificación: G05B19/042.
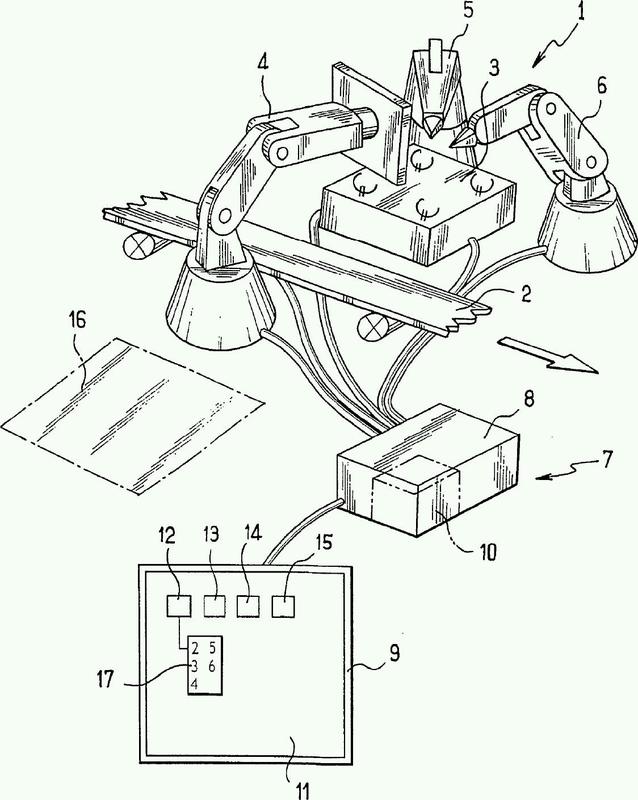
Procedimiento de pilotaje de al menos una estación de trabajo que comprende unas unidades operativas que comprenden al menos un robot como un robot de soldadura, estando las unidades operativas unidas a un autómata de pilotaje que ejecuta un programa de pilotaje, incluyendo el programa de pilotaje para cada unidad operativa al menos una subparte que define una pluralidad de series de acciones en función de estados de sincronización, incluyendo el procedimiento de pilotaje, después de que se haya compilado el programa de pilotaje, una fase de configuración y una fase de ejecución del programa de pilotaje, incluyendo la fase de configuración las etapas de seleccionar las unidades que hay que implementar, de parametrizar las subpartes correspondientes seleccionando la serie de acciones que hay que realizar y los estados de sincronización asociados, comprendiendo la fase de ejecución la etapa de ejecutar el programa de pilotaje configurado de este modo.
PDF original: ES-2690646_T3.pdf
Puesto de realización de un trabajo sobre una pieza.
Sección de la CIP Técnicas industriales diversas y transportes
(25/10/2017). Solicitante/s: ABB FRANCE. Clasificación: B23Q7/04, B62D65/00, B23K37/047, B23P21/00, B23P19/00, B25J9/00.
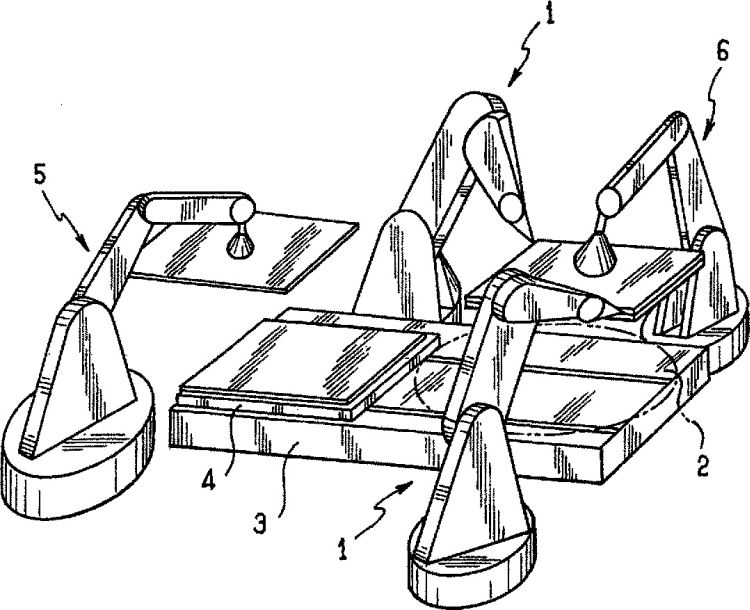
Procedimiento de manipulación de al menos una pieza en un puesto de fijación de al menos dos piezas una sobre otra, caracterizado por el hecho de que comprende las etapas de:
- posicionar las piezas en el puesto a través de un soporte ,
- comenzar la fijación,
- sustituir un robot prensor en el soporte cuando la fijación está suficientemente avanzada para inmovilizar el posicionamiento relativo de las dos piezas
- instalar nuevas piezas en el soporte en cuanto la sustitución es realizada y
- perseguir la fijación de las piezas llevadas por el robot prensor y, al final de la fijación, evacuar del puesto, por medio del robot prensor, las piezas fijadas de este modo.
PDF original: ES-2330028_T5.pdf
PDF original: ES-2330028_T3.pdf
PUESTO DE REALIZACION DE UN TRABAJO SOBRE UNA PIEZA.
Sección de la CIP Técnicas industriales diversas y transportes
(03/12/2009). Ver ilustración. Solicitante/s: ABB FRANCE. Clasificación: B23P21/00, B23P19/00B, B62D65/02, B25J9/00P, B25J9/00W, B25J9/00T, B23Q7/04, B62D65/00, B23K37/047, B23P19/00, B25J9/00.
Procedimiento de manipulación de al menos una pieza en un puesto de fijación de al menos dos piezas una sobre otra, caracterizado por el hecho de que comprende las etapas de:
- posicionar las piezas en el puesto a través de un soporte ,
- comenzar la fijación,
- sustituir un robot prensor en el soporte cuando la fijación está suficientemente avanzada para inmovilizar el posicionamiento relativo de las dos piezas
- instalar nuevas piezas en el soporte en cuanto la sustitución es realizada y
- perseguir la fijación de las piezas llevadas por el robot prensor y, al final de la fijación, evacuar del puesto, por medio del robot prensor, las piezas fijadas de este modo.
TALLER DE ENSAMBLAJE, PARTICULARMENTE PARA PIEZAS DE CHAPISTERIA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/09/1998). Ver ilustración. Solicitante/s: ABB PRECIFLEX SYSTEMS. Clasificación: B62D65/00, B23P21/00.
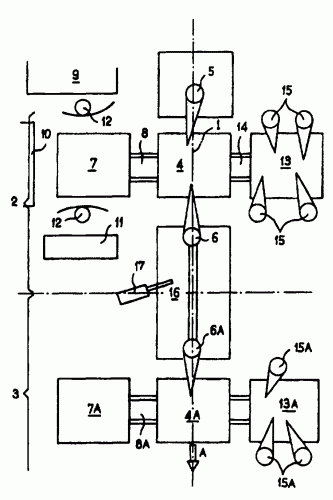
TALLER DE ENSAMBLAJE DE PIEZAS DE CHAPISTERIA QUE INCLUYE ESTACIONES DE PREPARACION DESTINADAS A COLOCAR LAS PIEZAS UNAS CON OTRAS, ESTACIONES DE ENSAMBLAJE DESTINADAS A FIJAR UNAS EN OTRAS LAS PIEZAS PREPARADAS Y ESTACIONES DE ACABADO DESTINADAS A COMPLETAR LA FIJACION DE LAS PIEZAS UNAS EN OTRAS. MAS CONCRETAMENTE, ESTE TALLER ESTA CONSTITUIDO POR VARIOS MODULOS CONECTADOS ENTRE SI POR AL MENOS UN MEDIO DE TRANSPORTE GENERAL QUE SE EXTIENDE A LO LARGO DE UNA DIRECCION DETERMINADA (A). CADA MODULO TIENE UNA ESTACION CENTRAL DE CARGA-DESCARGA ATRAVESADA POR EL MEDIO DE TRANSPORTE GENERAL , UNA ESTACION DE PREPARACION LATERAL CONECTADA A LA ESTACION CENTRAL POR UN TRANSPORTADOR BASICAMENTE PERPENDICULAR AL MEDIO DE TRANSPORTE , UNA ESTACION DE ENSAMBLAJE CONECTADA A LA ESTACION CENTRAL POR UN TRANSPORTADOR BASICAMENTE PERPENDICULAR AL MEDIO DE TRANSPORTE GENERAL Y AL MENOS UNA ESTACION DE ACABADO SITUADA A LO LARGO DEL MEDIO DE TRANSPORTE GENERAL , DESPUES DE LA ESTACION CENTRAL.
PROCEDIMIENTO Y DISPOSITIVO DE UNION PARA PIEZA DE CARROCERIA.
(16/06/1997) PROCEDIMIENTO DE MONTAJE DE PIEZAS DE CARROCERIA POR EL CUAL AL MENOS DOS ELEMENTOS SEPARADOS SON LLEVADOS A UN PUESTO DE CONFORMACION, SON INMOVILIZADOS MEDIANTE HERRAMIENTAS DE POSICIONAMIENTO, PERTENECIENTES AL PUESTO EN UNA POSICION RELATIVA DETERMINADA Y EN UNA POSICION DE CONJUNTO TAMBIEN DETERMINADA EN LA LOCALIZACION DEL PUESTO Y SE FIJAN UNO A OTRO PARTICULARMENTE POR SOLDADURA; EL PROCEDIMIENTO DE MONTAJE CONSISTE EN ASOCIAR A AL MENOS UNO DE LOS ELEMENTOS UN SOPORTE QUE COMPRENDE MEDIOS DE AGARRE DEL ELEMENTO DE LOS MEDIOS PARA SU FIJACION A LA MENOS UN DISPOSITIVO DE TRANSPORTE Y MEDIOS PARA SU INDEXACION EN LA LOCALIZACION…
PROCEDIMIENTO Y DISPOSITIVO DE ENSAMBLAJE DE CARROCERIAS CON HERRAMIENTAS LATERALES INTERLOCALIZABLES.
Sección de la CIP Técnicas industriales diversas y transportes
(01/11/1993). Solicitante/s: RENAULT-AUTOMATION. Clasificación: B62D65/00, B23K37/04.
PROCEDIMIENTO PARA LA INTERLOCALIZACION DE LAS HERRAMIENTAS DE UNA MAQUINA DE ENSAMBLAJE DE CARROCERIAS DEL TIPO QUE CONSISTE EN REPARTIR EL CONJUNTO DE LOS ELEMENTOS INTERMEDIOS PARA COLOCAR DICHAS HERRAMIENTAS, DE LA FUNCION DE PUESTA EN REFERENCIA GEOMETRICA DE LAS MISMAS, PARA CONFIAR A LAS PROPIAS HERRAMIENTAS LA TAREA DE INTERLOCALIZARSE TRAS EL AISLAMIENTO TEMPORAL DE UNA PARTE DE LAS MISMAS, DE SUS ELEMENTOS DE COLOCACION. DE ACUERDO CON EL INVENTO, DICHAS HERRAMIENTAS QUEDAN POSICIONADAS LATERALMENTE. APLICACION: EN ESPECIAL, EN LAS LINEAS DE ENSAMBLAJE DE CARROCERIAS DE AUTOMOVILES.
{kind=link}
{kind=link}
{kind=link}