Bobina de pinza de apriete.
(17/09/2018) Bobina para almacenar y dispensar un producto de devanado arrollado sobre la bobina , en especial una sarta de pinza de apriete, en donde la bobina presenta un buje con un eje del buje (A) y unas paredes laterales dispuestas cada una en los extremos frontales axiales del buje , que sobresalen por encima de la superficie perimétrica exterior del buje en una dirección al menos aproximadamente radial, en donde el espacio de almacenamiento, definido por las superficies mutuamente enfrentadas de las paredes laterales y la superficie perimétrica exterior del buje y que circula alrededor del buje , se usa para alojar el producto de devanado, en donde el buje está conformado al menos por segmentos con doble pared, con una primera pared…
Sistema compuesto de una máquina grapadora y de una reserva de grapas y procedimiento para el servicio de una máquina grapadora de este tipo.
(23/03/2016) Sistema , comprendiendo: una máquina grapadora , con por lo menos un primer útil de cierre intercambiable, móvil en relación con un segundo útil de cierre para el cierre de grapas alrededor de una envoltura de embalaje en forma de tubo o bolsa, y una reserva de grapas caracterizado porque tanto el primer útil de cierre como la reserva de grapas presentan una marca distintiva y porque la máquina grapadora presenta un primer dispositivo sensor configurado para identificar la marca distintiva de la reserva de grapas y para emitir una señal de información de grapas correspondiente, un segundo dispositivo sensor configurado para identificar la marca distintiva del primer útil de cierre y para emitir una señal de información de útil de cierre correspondiente así como un equipo de control con una entrada de señales…
Sistema de control de grapas.
Sección de la CIP Técnicas industriales diversas y transportes
(27/01/2016). Ver ilustración. Solicitante/s: POLY-CLIP SYSTEM CORP.. Clasificación: B65B57/00, B65B1/08, B67B3/26.
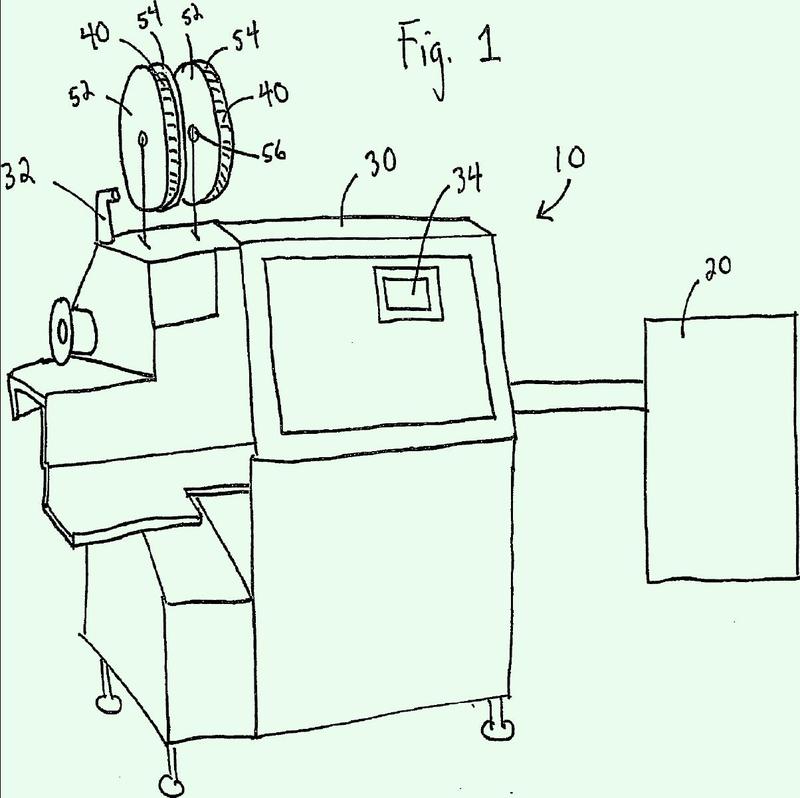
Un sistema de control de grapas que comprende:
una embutidora/grapadora para procesar un producto alimenticio, comprendiendo dicha embutidora/grapadora un dispositivo lector y una unidad de procesamiento y que tiene un parámetro operativo específico del producto, comprendiendo dicho parámetro operativo al menos una de entre una configuración del tipo de grapa, una porción de envoltura, una etiqueta, un control de la velocidad y un freno de la envoltura;
un paquete de grapas montable en dicha embutidora/grapadora y que contiene una pluralidad de grapas ; e
información codificada en dicho paquete de grapas y legible por el dispositivo lector ;
estando configurada dicha unidad de procesamiento para recibir dicha información y para establecer dicho parámetro operativo en función de ello.
PDF original: ES-2564150_T3.pdf
Sistema de llenado híbrido.
(04/12/2013) Un sistema para producir productos alimenticios que comprende:
una mezcladora ;
un brazo estacionario que tiene un extremo superior y un extremo inferior, estando conectado dichoextremo superior a dicha mezcladora , estando montado dicho brazo estacionario en un termo-sellador ;
un primer brazo de producto que tiene un primer extremo y un segundo extremo, pudiendo conectarsedicho primer brazo de producto a dicho termo-sellador y pudiendo moverse desde una primera posición en laque dicho primer extremo puede fijarse a dicho extremo inferior de dicho brazo estacionario y dichosegundo extremo está cerca de un dispositivo…
Procedimiento y sistema para pesar productos.
(25/07/2013) Procedimiento para controlar un sistema para la producción de productos en forma de salchicha (S) con lasetapas de:
- proporcionar una envoltura tubular;
- rellenar dicha envoltura tubular con material viscoso o granular;
- dividir la envoltura tubular llena en productos en forma de salchicha (S) y cerrar los productos en forma desalchicha (S) mediante grapas de cierre en una máquina de grapado;
- alimentar al menos un producto en forma de salchicha (S) fuera de la máquina de grapado y almacenar elproducto en forma de salchicha (S) en un elemento en forma de varilla (R) en una línea colgante , y
- sujetar el elemento en forma de varilla (R) mediante un dispositivo robótico y almacenar el elemento…
Dispositivo robótico para insertar o extraer elementos a tipo varilla.
(29/08/2012) Procedimiento para controlar un dispositivo robótico para introducir o extraer elementos a modo de varilla (R),tal como barras de ahumado, en o de un bastidor de almacenamiento , sirviendo los elementos a modo de varilla(R) para almacenar productos a modo de salchicha (S), tal como salchichas, cada uno de los cuales tiene un cuerpoen forma de salchicha y un bucle en un extremo del cu 5 erpo para un almacenamiento pendular de los productos (S),que comprende las etapas de:
- proporcionar un bastidor de almacenamiento móvil que comprende al menos una bandeja para elalmacenamiento temporal de los elementos a modo de varilla (R) en el mismo,
- mover el bastidor de almacenamiento en el rango…
(11/07/2012) Pinza de cierre para cerrar material de embalaje en forma de tubo o bolsa con dos brazos idénticos que definen un plano de pinza y que están unidos mediante una sección de conexión, pinza de cierre que está hecha de plástico y que se puede cerrar mediante un proceso de deformación en frío,
GRAPADORA AUTOMATICA Y PROCEDIMIENTO PARA CONFIGURAR UNA GRAPADORA AUTOMATICA.
Secciones de la CIP Necesidades corrientes de la vida Técnicas industriales diversas y transportes
(08/10/2009). Ver ilustración. Solicitante/s: POLY-CLIP SYSTEM GMBH & CO. KG. Clasificación: A22C11/00, B65B51/04.
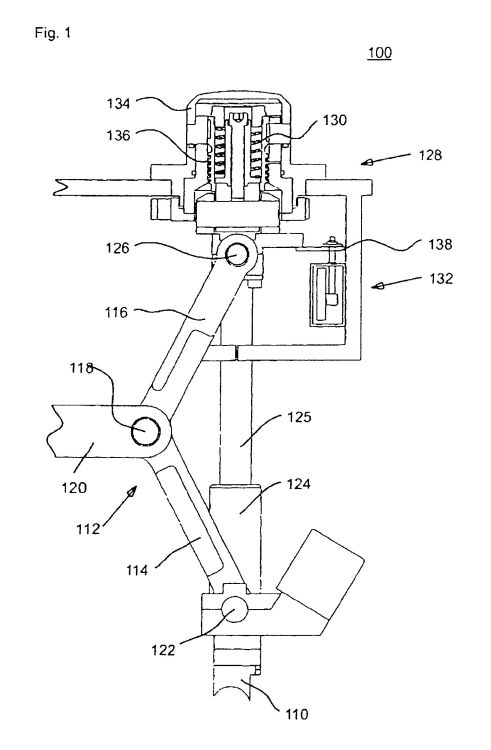
Grapadora automática con dos herramientas de cierre que para cerrar grapas pueden moverse una respecto a otra entre una posición de apertura y una posición de cierre, y con medios de ajuste configurados para ajustar la posición de reposo de una herramienta de cierre y, por tanto, la distancia de las herramientas de cierre , especialmente en su posición de cierre (distancia de cierre), y con un dispositivo de medición conectado a una herramienta de cierre y configurado para medir una fuerza de cierre aplicada durante el cierre de una grapa o una magnitud proporcional a ésta y para emitir un valor medido que representa la fuerza de cierre o la magnitud proporcional a ésta, caracterizada por un sensor de posición acoplado a la herramienta de cierre ajustable, que está configurado para generar y emitir un valor de posición de reposo que representa la posición de reposo de la herramienta de cierre ajustada.
{kind=link}
{kind=link}