Aprendizaje de impedancia en base a sistema de localización usando imágenes de catéter registradas.
(01/01/2020) Un aparato, que comprende:
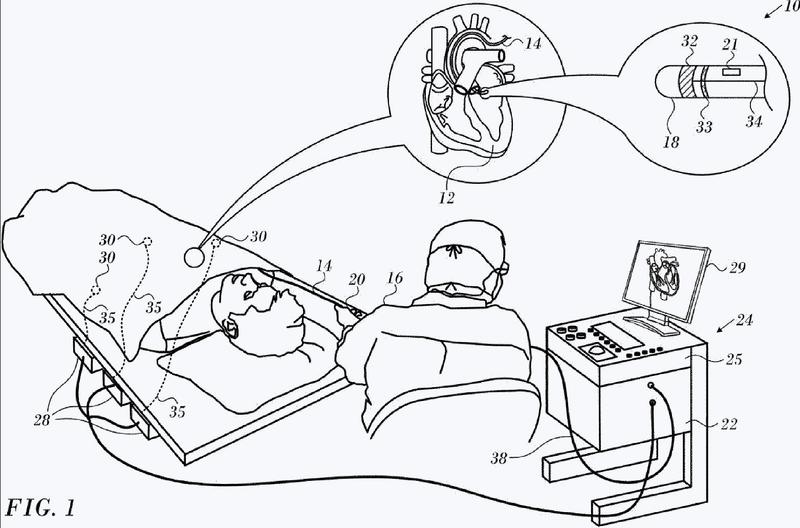
un catéter que tiene por lo menos un electrodo que está configurado para ser insertado en una cámara de un órgano del cuerpo de un paciente ;
equipo fluoroscópico ; y un procesador , que está configurado para:
registrar en una secuencia de veces los primeros conjuntos de corrientes respectivos entre por lo menos un electrodo y una pluralidad de parches colocados en la piel del paciente ,
mientras se registran los primeros conjuntos de corrientes, adquirir imágenes de rayos X usando el equipo fluoroscópico del por lo menos un electrodo y la pluralidad de parches , y determinar las localizaciones del catéter a partir de las imágenes,
analizar las imágenes de rayos X o los primeros conjuntos de corrientes para…
Visualización de puesta a cero manual de apoyo.
Sección de la CIP Necesidades corrientes de la vida
(02/10/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14, A61B90/00, A61B34/20.
Un aparato que comprende:
una sonda , configurada para su inserción en una cavidad corporal que tiene un pool sanguíneo de un paciente y que comprende un sensor de fuerza de contacto para medir una fuerza aplicada al sensor de fuerza de contacto y sensores de localización para detectar una ubicación de la sonda en la cavidad corporal; y
un procesador , que está configurado para recibir una pluralidad de mediciones del sensor de fuerza de contacto y operativo para:
generar una imagen del pool sanguíneo en base a los datos de imágenes recibidos de una modalidad de obtención de imágenes externa;
retirar una parte del pool sanguíneo de la imagen para retener una parte restante del pool sanguíneo en el mismo, en donde la parte retirada comprende una parte del pool sanguíneo adyacente a una superficie de la cavidad corporal; y
presentar una ubicación de un segmento distal de la sonda en la imagen.
PDF original: ES-2762212_T3.pdf
Buscador de brechas en el aislamiento de venas pulmonares.
Sección de la CIP Necesidades corrientes de la vida
(29/05/2019). Ver ilustración. Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/12, A61B18/14, A61B18/00, A61B90/00, A61B34/10, A61B34/20.
Un aparato , que comprende:
una sonda adaptada para su inserción en contacto con un corazón en un cuerpo de un sujeto, teniendo la sonda un sensor de ubicación y un electrodo en una parte distal de la sonda;
un generador de energía de ablación ;
un procesador unido al sensor de ubicación, y dispuesto de manera cooperativa con el generador de energía de ablación para realizar la etapa de:
ablación de una pluralidad de sitios en el corazón, los sitios tienen ubicaciones respectivas en un sistema de coordenadas tridimensional;
proyección de las ubicaciones de los sitios en un plano de simulación;
identificación de un conjunto de rutas tridimensionales más cortas que correspondan a conexiones bidimensionales entre pares de las ubicaciones proyectadas de los sitios, teniendo las rutas tridimensionales las longitudes respectivas;
y
notificación de un espacio como la más larga de las rutas tridimensionales.
PDF original: ES-2739486_T3.pdf
Estimación en tiempo real de riesgo de perforación del tejido durante procedimiento médico mínimamente invasivo.
Sección de la CIP Necesidades corrientes de la vida
(15/05/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14, A61B5/00, A61B18/00, A61B17/00, A61B90/00.
Un aparato para realizar un procedimiento médico, que comprende:
una sonda invasiva que comprende una punta de sonda, que está configurada para ser acoplada al tejido en un órgano de un paciente; y
un procesador , que está acoplado a la sonda y está configurado para medir una fuerza ejercida por la punta sobre el tejido y un desplazamiento de la punta creado por la fuerza, para calcular una dependencia de la fuerza sobre el desplazamiento, y para estimar, en base a la dependencia calculada, un nivel de riesgo de perforación del tejido; en el que el procesador está configurado para identificar que la perforación ha tenido lugar tras detectar que la fuerza está inversamente relacionada con el desplazamiento.
PDF original: ES-2738646_T3.pdf
Identificar y mostrar posibles cambios de mapa.
(01/05/2019) Un equipo o aparato, que comprende:
un sistema de rastreo que está configurado para rastrear la ubicación de una sonda en un órgano de un cuerpo humano;
un sistema de coordenadas de referencia;
una pantalla de visualización ; y
un procesador que está configurado:
para realizar un primer registro del sistema de rastreo con el sistema de coordenadas de referencia, para medir las primeras ubicaciones de la sonda en el órgano después del primer registro, para mostrar o presentar en la pantalla los primeros indicadores (110A-110C) en una imagen del órgano indicando las primeras ubicaciones con un primer efecto visual en puntos o posiciones de la imagen que se determinan de acuerdo con el primer registro,
después de medir las primeras ubicaciones,…
Compensación para movimiento de corazón en un sistema de coordenadas corporales.
(05/04/2019) Aparato, que comprende:
una sonda flexible , que tiene un extremo distal , configurada para insertarse en un sujeto vivo ;
un sensor de posición constituido en el extremo distal, configurado para generar señales de posición indicativas de una posición del extremo distal en un corazón del sujeto;
un electrodo (32A-C) constituido en el extremo distal, configurado para transmitir señales eléctricas desde el corazón; y
un procesador ;
caracterizado porque el procesador está configurado para:
formular, en respuesta a las señales de posición, una primera indicación de un cambio en una posición media del extremo distal de la sonda flexible…
Determinación del estado de no contacto de un catéter.
(13/03/2019) Aparato, que comprende:
una primera sonda configurada para su inserción en una cavidad en un cuerpo de un sujeto;
un sensor de fuerza ubicado dentro de la primera sonda ;
una segunda sonda configurada para insertarse en la cavidad cerca de la primera sonda ; y
un procesador , configurado para:
identificar un primer período en el que las primeras lecturas recibidas por el procesador desde el sensor de fuerza son indicativas de un primer cambio en las fuerzas de contacto medidas entre la primera sonda y la cavidad en menos de un límite predeterminado durante al menos un intervalo de tiempo predeterminado, y las primeras…
{kind=link}