6 inventos, patentes y modelos de LO, THOMAS K.
DISCRIMINACION DE LA RELACION DE AMPLITUD PARA PROCESADORES MTI.
Sección de la CIP Física
(16/08/1999). Solicitante/s: RAYTHEON COMPANY. Clasificación: G06T7/20, G01S3/786, G01S3/781.
UN SISTEMA PARA DETECTAR UN OBJETO EN UNA ESCENA. LA INVENCION CONSTA DE UNA MEMORIA PARA ALMACENAR UNA PRIMERA MEMORIA DE DATOS DE IMAGENES REPRESENTADA POR UNA PLURALIDAD DE SEÑALES DE ENTRADA IO. HAY UN FILTRO ESPACIAL PARA FILTRAR ESPACIALMENTE UNA SEGUNDA MEMORIA DE DATOS DE IMAGENES REPRESENTADA POR UNA PLURALIDAD DE SEÑALES DE ENTRADA IO PARA PROPORCIONAR UNAS PRIMERAS SEÑALES DE SALIDA DEL FILTRO ESPACIAL A MODO DE NSIO. SE SUSTRAEN ESTAS SEÑALES DE LA PRIMERA MEMORIA DE DATOS DE IMAGENES PARA OBTENER LAS SEÑALES DE DIFERENCIA DEL MODO NDLO, DONDE ND REPRESENTA UNA MEDIDA DE REGISTRO DEL OBJETO. HAY UN SEGUNDO FILTRO ESPACIAL PARA FILTRAR ESPACIALMENTE LAS SEÑALES DE DIFERENCIA PARA PROPORCIONAR LAS SEÑALES DE DIFERENCIA FILTRADAS ESPACIALMENTE A MODO DE NSNDIO. FINALMENTE, SE PROCESAN LAS SEÑALES PARA EXTRAER LA MEDIDA DE REGISTRO DEL OBJETO ND.
SEÑALADOR DE RECORRIDO SINERGISTICO.
(01/10/1996) SE PROPORCIONA CAPACIDAD DE SEÑALADOR DE RECORRIDO DE OBJETIVO MEDIANTE UN SISTEMA SEÑALADOR DE RECORRIDO SINERGISTICO QUE INCLUYE UN SEÑALADOR DE RECORRIDO DE CORRELACION Y UN SEÑALADOR DE RECORRIDO DE OBJETO PARA PROCESAR ENTRADA DE DATOS DE SENSOR Y PARA GENERAR SEÑALES DE ERROR DE SEÑALADOR DE RECORRIDO . EL FUNCIONAMIENTO DEL SISTEMA SEÑALADOR DE RECORRIDO SINERGISTICO SE CONTROLA MEDIANTE UNA UNIDAD DE PROCESAMIENTO CENTRAL . EL SISTEMA FUNCIONA CORRELACIONANDO PRIMERO UNA IMAGEN DE REGION DE REFERENCIA CON UNA PORCION DE UNA IMAGEN DIGITIZADA EN CURSO PROPORCIONADA POR UN CONVERTIDOR DE ANALOGICO A DIGITAL . EN SEGUNDO LUGAR, EL SEÑALADOR DE RECORRIDO DE OBJETO PROPORCIONA…
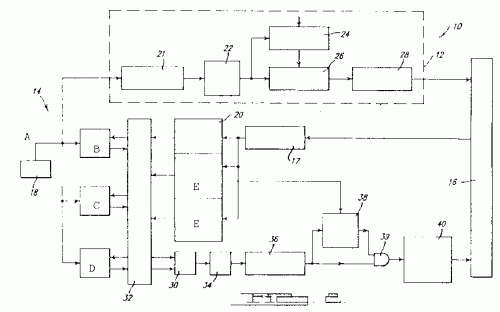
METODO Y APARATO PARA DETECTAR UN OBJETO DE UNA PLURALIDAD DE CUADROS DE IMAGENES.
Sección de la CIP Física
(01/10/1990). Ver ilustración. Solicitante/s: HUGHES AIRCRAFT COMPANY. Clasificación: G06F15/66, G01S7/298.
METODO Y APARATO PARA DETECTAR UN OBJETO EN UNA PLURALIDAD DE CUADROS DE IMAGENES; SE DETECTAN OBJETOS MOVILES HECHOS APARECER EN SILUETA CONTRA SEÑALES PARASITAS DE FONDO; SE UTILIZA UN SUBSISTEMA DE CORRELACION PARA HACER COINCIDIR EL FONDO DE UN CUADRO DE IMAGEN ACTUAL (ALMACEN 1) CON UN CUADRO DE IMAGEN TOMADO ANTERIORMENTE (ALMACEN 3); SE GENERA UNA PRIMERA IMAGEN DIFERENCIAL SUSTRAYENDO LAS IMAGENES REGISTRADAS, FILTRANDO LA PRIMERA IMAGEN DIFERENCIAL Y PERCIBIENDO SU UMBRAL SE GENERA UNA SEGUNDA IMAGEN DIFERENCIAL ENTRE EL CUADRO DE IMAGEN ACTUAL Y OTRO CUADRO DE IMAGEN TOMADO POSTERIORMENTE. ESTA SEGUNDA IMAGEN DIFERENCIAL SE FILTRA Y SE PERCIBE SU UMBRAL; LAS IMAGENES SE PONEN EN FUNCION LOGICA Y POR LA PUERTA CONECTADA A UN FORMATEADOR, UN CLASIFICADOR Y UN EXTRACTOR DE CARACTERISTICAS Y SE GENERAN FICHEROS DE SEGUIMIENTO EN LA CPU . APLICACION A LA DETECCION DE OBJETOS.
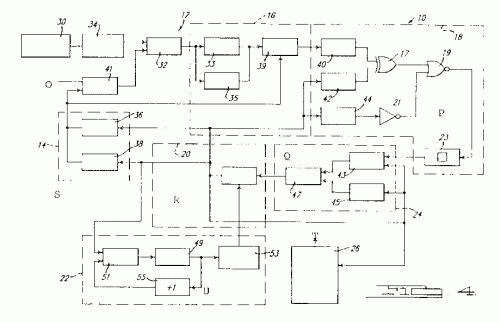
METODO Y APARATO PARA CORRELACIONAR DOS SEÑALES EN TRATAMIENTO DE IMA-GENES.
Sección de la CIP Física
(01/10/1990). Ver ilustración. Solicitante/s: HUGHES AIRCRAFT COMPANY. Clasificación: G06F15/66.
METODO Y APARATO PARA CORRELACIONAR DOS SEÑALES EN TRATAMIENTO DE IMAGENES, QUE REPRESETAN UNA IMAGEN EN VIVO Y UNA IMAGEN DE REFERENCIA; LA SEÑAL DE REFERENCIA ES TRATADA PARA PROPORCIONAR UN BITIO DE POLARIDAD Y UN BITIO DE MASCARA PARA CADA POSICION DE ELEMENTO DE IMAGEN EN LA IMAGEN DE REFERENCIA. LA SEÑAL DE VIDEO TRATADA ES ALMACENADA EN UNA MEMORIA Y USADA EN UN CONVOLUCIONADOR Y SECCION SUMADORA EN QUE LOS BITIOS DE POLARIDAD ENTRE LAS IMAGENES DE REFERENCIA Y EN VIVO SON DEJADOS PASAR DISCRIMINADAMENTE POR LA PUERTA Y USADOS PARA GENERAR UNA SALIDA DE CORRELACION A PARTIR DEL SUMADOR . APLICACION A TECNICAS DE TRATAMIENTO DE IMAGENES, PARTICULARMENTE ADAPTAR DISEÑOS.
UN METODO PARA LA DETECCION DE LA LOCALIZACION ESPACIAL DE UN OBJETO MOVIL Y UN APARATO PARA GENERAR UN PUNTO DE REFERENCIA PARA UN DISPOSITIVO DE BUSQUEDA.
(01/09/1990) UN METODO PARA LA DETECCION DE LA LOCALIZACION ESPACIAL DE UN OBJETO MOVIL Y UN APARATO PARA GENERAR UN PUNTO DE REFERENCIA PARA UN DISPOSITIVO DE BUSQUEDA. UN SEGUIDOR CONVENCIONAL , QUE SE UTILIZA PARA APUNTAR DE MODO CONTINUO UN SENSOR A UN OBJETO VOLADOR, DE MODO QUE ESTE SITUADO SUSTANCIALMENTE EN LA MISMA LOCALIZACION ESPACIAL EN UNA PLURALIDAD DE CUADROS DE IMAGEN TOMADOS EN MOMENTOS DIFERENTES. POR TANTO, EL OBJETO PERMANECE APROXIMADAMENTE EN LA MISMA POSICION ESPACIAL EN CADA CUADRO DE IMAGEN MIENTRAS QUE LOS ECOS PARASITOS DE FONDO EN GENERAL CAMBIAN. MEDIANTE EL TRATAMIENTO DE DOS O MAS DE LOS CUADROS DE IMAGEN, ES POSIBLE CALCULAR UN PUNTO DE REFERENCIA MAS PRECISO PARA EL OBJETO, DE LO QUE EN GENERAL ES POSIBLE MEDIANTE EL PUNTO DE SEGUIMIENTO. EL APARATO COMPRENDE…
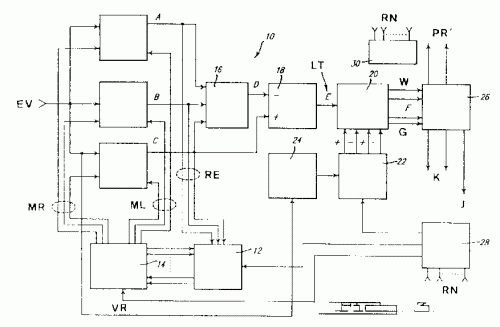
UN METODO Y UN APARATO PARA DETECTAR UN OBJETO MOVIL EN UNA PLURILIDAD DE CUADROS DE IMAGEN.
Sección de la CIP Física
(01/08/1990). Ver ilustración. Solicitante/s: HUGHES AIRCRAFT COMPANY. Clasificación: G06F15/70, G06F15/336.
UN METODO Y UN APARATO PARA DETECTAR UN OBJETO MOVIL EN UNA PLURALIDAD DE CUADROS DE IMAGEN. EL METODO COMPRENDE DISPONER COINCIDENTEMENTE EL FONDO DE AL MENOS TRES CUADROS DE IMAGEN; SELECCIONAR UN VALOR DE LA MEDIANA DE LOS CUADROS DE IMAGEN PUESTOS EN COINCIDENCIA; RESTAR LOS VALORES MEDIANTES DE PIXEL DE LOS DE UNO DE LOS CUADROS DE IMAGEN; Y APLICAR UN UMBRAL A LA IMAGEN DIFERENCIA. EL APARATO COMPRENDE MEDIOS PARA REALIZAR CADA UNA DE LAS OPERACIONES DEL METODO ANTES DESCRITO.
{kind=link}
{kind=link}
{kind=link}