221 patentes, modelos y diseños de DR. JOHANNES HEIDENHAIN GMBH (pag. 6)
DISPOSITIVO DE MEDICION ANGULAR Y USO DE ESTE DISPOSITIVO DE MEDICION ANGULAR.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(01/11/2008). Ver ilustración. Inventor/es: HOLZAPFEL, WOLFGANG, TONDORF,SEBASTIAN. Clasificación: B23Q17/22, G01B11/26, G01D5/36.
Un dispositivo de medición angular con un soporte de graduación , una placa de exploración y un equipo detector en una pieza estacionaria para la medición de la posición de giro del soporte de graduación con respecto a la placa de exploración alrededor de un primer eje de giro (W), caracterizado porque - la placa de exploración con el soporte de graduación puede girar alrededor de un segundo eje de giro (S) con respecto al equipo detector y - los dos ejes de giro (S, W) son paralelos entre sí y están separados radialmente.
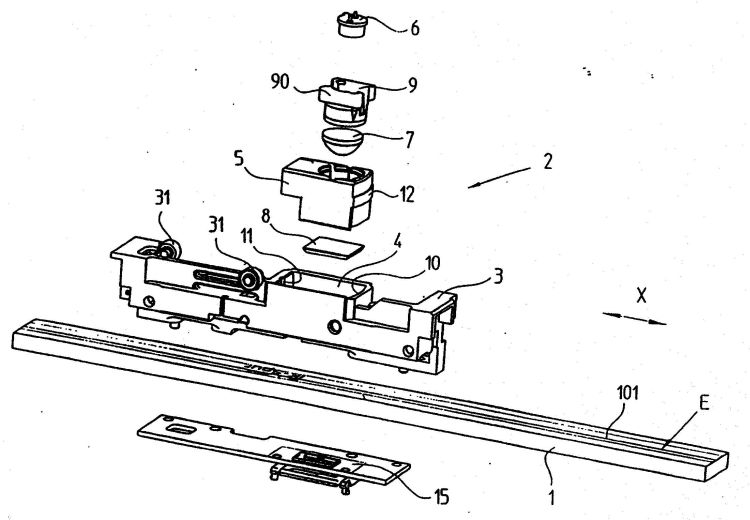
METODO PARA EL MONTAJE DE UN APARATO DE MEDICION DE LONGITUDES Y UN APARATO DE MEDICION DE LONGITUDES CORRESPONDIENTE.
(16/06/2008) Un método para el montaje de un aparato de medición de longitudes en un soporte , en el que - el aparato de medición de longitudes , en una primera etapa de montaje, forma una unión de rozamiento adhesiva con la superficie de soporte, donde al menos un elemento de montaje genera una fuerza de atracción magnética o una fuerza de atracción que se produce por una presión negativa entre el soporte y el aparato de medición de longitudes , y esta fuerza de atracción está dimensionada de tal manera que la correspondiente fuerza de rozamiento garantiza una capacidad de desplazamiento del aparato de medición de longitudes , - en una segunda etapa de montaje se ajustan la posición y la dirección del aparato de medición de…
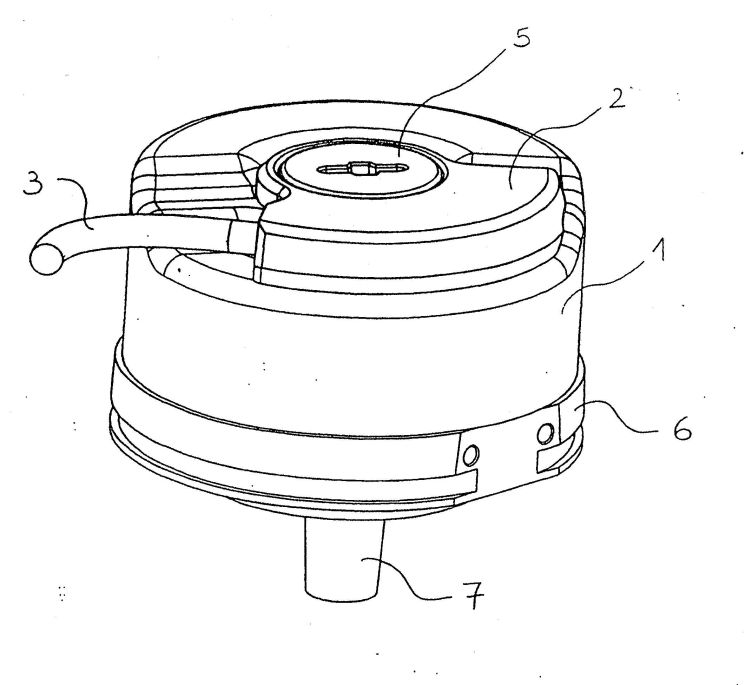
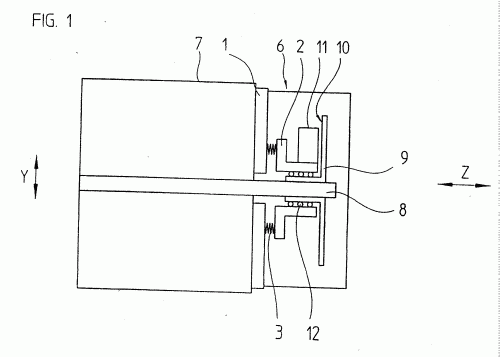
DISPOSITIVO DE MEDICION ANGULAR.
Sección de la CIP Física
(16/06/2008). Ver ilustración. Inventor/es: MEYER,HERMANN, SCHMID,ALFRED, TAUBER,JOHANN. Clasificación: G01D5/347.
Un dispositivo de medición angular con - una tapadera , - un cable de conexión , y - un elemento de resorte , que comprende una lengüeta y se dispone en la tapadera , en el que para la fijación del cable de conexión se puede generar una fuerza mediante el elemento de resorte que presenta, con respecto al cable de conexión , un componente de dirección radial, donde por esta fuerza, el cable de conexión se comprime mediante la lengüeta contra la tapadera , de forma que el cable de conexión se fija en una zona de contacto de la tapadera con arrastre de forma y/o con cierre de fuerza por rozamiento en la tapadera.
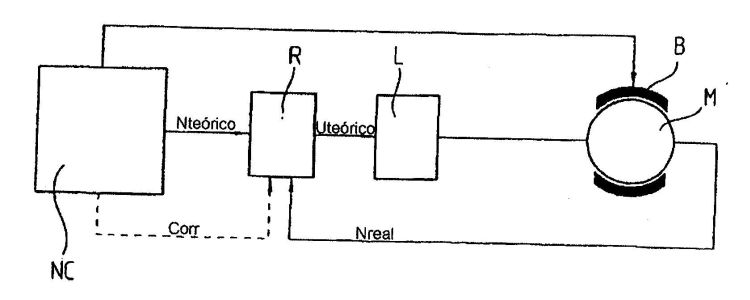
METODO PARA EL ACCIONAMIENTO DE UN FRENO DE PARADA.
Sección de la CIP Física
(01/06/2008). Ver ilustración. Inventor/es: KERNER, NORBERT, KOHLER,FRIEDER. Clasificación: G05B13/02.
Un método para accionar un freno de parada (B) de un accionamiento eléctrico, que comprende un motor (M) y un circuito de regulación (R) con parámetros de regulación (KP, KI), donde al menos uno de los parámetros de regulación (KP, KI) se modifica, caracterizado por una primera etapa de acuerdo con la cual el al menos un parámetro de regulación, (KP, KI) se modifica incluso antes de encajar el freno de parada (B) de tal forma que al encajar el freno de parada (B) con un circuito de regulación (R) activo al mismo tiempo, en la segunda etapa se evitan o disminuyen en gran medida oscilaciones.
METODO PARA LA DETERMINACION DE UNA POSIBLE COLISION ENTRE AL MENOS DOS OBJETOS MOVILES ENTRE SI.
(01/06/2008) Un método para la determinación de una posible colisión de al menos dos objetos móviles entre sí por la simulación del movimiento relativo previsto de los objetos, en el que - a al menos uno de los objetos se asigna una carcasa que rodea el objeto, - la trayectoria que representa el movimiento relativo de los objetos se explora con pasos con una primera anchura de paso definida y - para la determinación de una posible colisión de los objetos se detecta la presencia de un solapamiento de los objetos, donde al menos en uno de los objetos, para la detección de un solapamiento, se hace referencia a la carcasa asignada, caracterizado porque a) al menos a uno de los objetos (K1, K2) se asigna una carcasa interna y una externa (I1, A1; I1, A2), de las…
DISPOSITIVO DE MEDICION DE LA POSICION.
(01/05/2008) Un dispositivo de medición de la posición con un soporte de graduación , en el que la graduación de medición del soporte de graduación se puede explorar para la generación de señales de exploración dependientes de la posición por una unidad de exploración , y el soporte de graduación es una delgada cinta flexible que está fijada de forma adherente por una película viscosa de líquido como película intermedia sobre una superficie de una sujeción por fuerzas de adhesión, caracterizado porque - la graduación de medición se dispone de forma opuesta a la superficie de la sujeción ; - la graduación de medición se puede explorar a través de la sujeción ; - la sujeción es un cuerpo con estabilidad propia, cuya superficie sirve como superficie de referencia con respecto…
DISPOSITIVO DE MEDICION DE DESPLAZAMIENTO.
(01/05/2008) Un sistema de medición de desplazamiento para la detección de la posición de dos componentes móviles relativamente entre sí, particularmente piezas de máquina, con - una escala de medición que comprende una graduación de medición en un cuerpo de soporte , que se asigna a un primer de los dos componentes, donde la graduación de medición define una dirección de medición (V), - un dispositivo de exploración para la exploración de la graduación de medición , que se asigna al segundo de los dos componentes, - un dispositivo de guía previsto en el cuerpo de soporte , con el que el dispositivo de exploración se guía de forma desplazable a lo largo de la graduación…
METODO PARA EL CONTROL SEGURO DE LA POSICION.
(01/05/2008) Un método para la control seguro de la posición, en el que para el método se usa un Control Numérico con una primera unidad aritmética lógica (CPU1), una segunda unidad aritmética lógica (CPU2) y un generador de valor teórico (IPO) y un aparato de medición de la posición (G1) y en el que * el aparato de medición de la posición (G1) transmite dos valores de medición de la posición (L1, V1) a la primera unidad aritmética lógica (CPU1), * el generador de valor teórico (IPO) transmite un valor teórico (S1) a la segunda unidad aritmética lógica (CPU2), * uno de los valores de medición de la posición (L1, V1) también se transmite a la segunda unidad aritmética lógica (CPU2), * el valor teórico (S1) también se transmite a la primera unidad aritmética lógica (CPU1),…
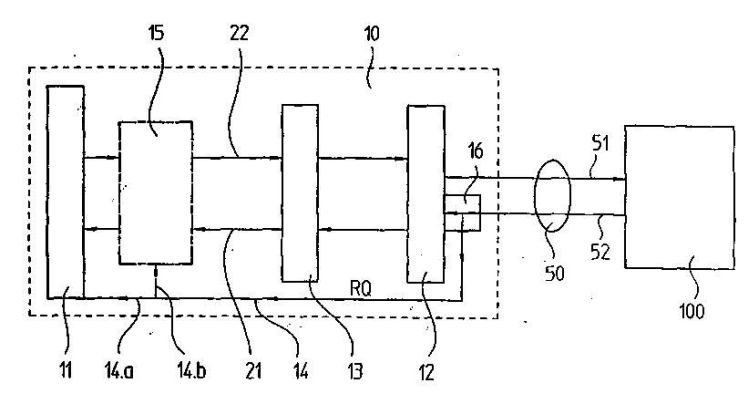
METODO PARA EL ACCIONAMIENTO DE UN DISPOSITIVO DE MEDICION DE LA POSICION Y DISPOSITIVO DE MEDICION DE LA POSICION ADECUADA PARA EL MISMO.
Sección de la CIP Física
(16/04/2008). Ver ilustración. Inventor/es: HOFBAUER, HERMANN, STRASSER, ERICH. Clasificación: G01D5/244.
Un método para el accionamiento de un dispositivo de medición de la posición , que comprende una unidad de generación de señal para la generación de datos de posición y que se une por una unidad de comunicación con un componente electrónico secuencial , en el que la transmisión de datos entre la unidad de generación de señal y la unidad de comunicación se realiza por una unidad de interfaz interna , con las siguientes etapas: - transmisión de ordenes de solicitación de datos de medición (RQ), que se transmiten por el componente electrónico secuencial al dispositivo de la posición , sin más demora en el tiempo para la generación de datos de medición evitando la unidad de interfaz interna a la unidad de generación de señal , - transmisión de los datos de posición generados como consecuencia de las órdenes de solicitación de datos de medición (RQ) desde la unidad de generación de señal a la unidad de comunicación por la unidad de interfaz interna.
METODO Y DISPOSITIVO PARA LA REGULACION DE UNA FUENTE DE LUZ DE UN APARATO DE MEDICION DE POSICION.
(16/03/2008) Un dispositivo para la regulación de una fuente de luz de un aparato de medición de posición, que comprende - una realización de una medida que se puede desplazar respecto a la fuente de luz , - varios fotodetectores , mediante los cuales se puede transformar la luz emitida por la fuente de luz en corrientes fotoeléctricas (I0º, I90º, I180º, I270º; I8), donde la corriente fotoeléctrica (I0º, I90º, I180º, I270º; I8) de al menos uno de los fotodetectores se puede usar como base para la formación de una magnitud real (U4; U8), y los fotodetectores se disponen de tal manera que al menos por una cantidad parcial de los…
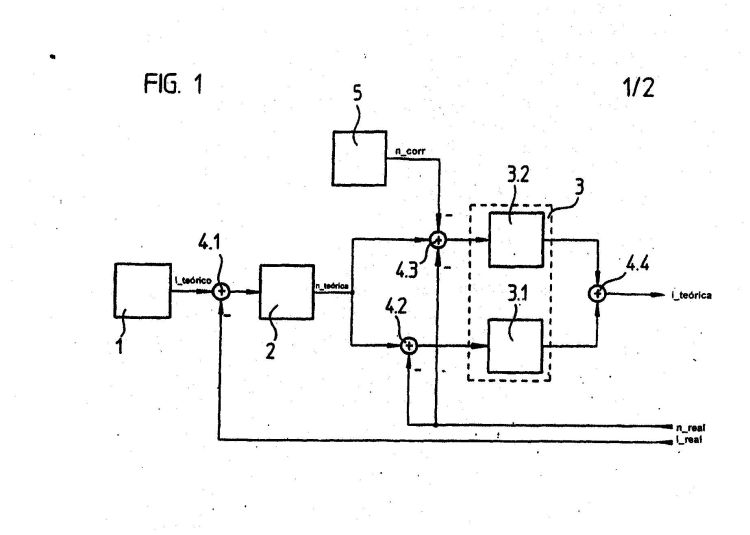
METODO DE REGULACION PARA LA AMORTIGUACION ACTIVA DE VIBRACIONES DE BAJA FRECUENCIA EN MAQUINAS HERRAMIENTAS CONTROLADAS NUMERICAMENTE.
Secciones de la CIP Física Mecánica, iluminación, calefacción, armamento y voladura
(01/03/2008). Ver ilustración. Inventor/es: KERNER, NORBERT, LENGENFELDER,HANS. Clasificación: G05B13/02, G05B19/404, F16F15/02, G05B5/01, G05B13/00.
Una estructura de regulación para la amortiguación activa de vibraciones de baja frecuencia en máquinas-herramienta controladas numéricamente, con un regulador del número de revoluciones con un componente proporcional y un componente integral , caracterizada porque una señal de corrección (n_corr) de baja frecuencia sin componentes continuos con desplazamiento de fase respecto a la vibración de baja frecuencia perturbadora, que se forma en un elemento de amortiguación activo , se conmuta en un sitio de adición delante o detrás del componente integral.
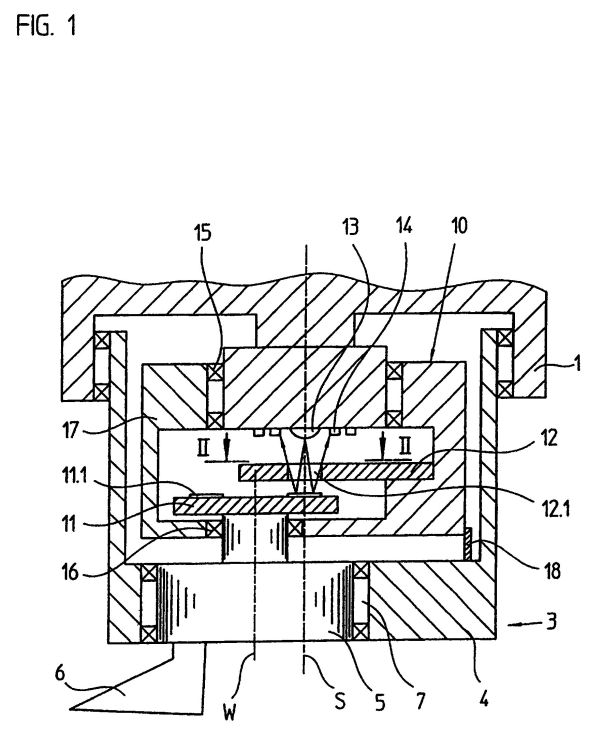
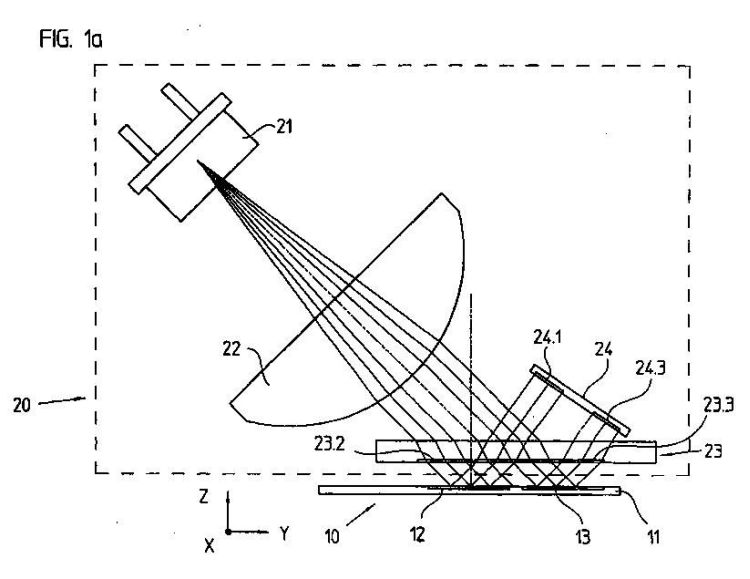
UNIDAD DE EXPLORACION DE UN DISPOSITIVO DE MEDICION DE POSICION.
Sección de la CIP Física
(01/03/2008). Ver ilustración. Inventor/es: GSCHOSSMANN, HORST, TONDORF,SEBASTIAN, FALKINGER,BERNHARD. Clasificación: G01B11/00.
Una unidad de exploración del dispositivo de medición de posición para la exploración fotoeléctrica de una escala de medición en una distancia de exploración fija A, con un soporte , en el que se puede ajustar una sujeción , que comprende una fuente de luz un dispositivo de formación de haz y una placa de exploración , caracterizada porque el soporte presenta una cavidad con superficies de guía , en las que la sujeción se puede desplazar en el sentido de la distancia de exploración A y girar en todas las direcciones, apoyándose la sujeción en las superficies de guía del soporte en varios puntos y porque la sujeción se puede fijar después del ajuste realizado en estos puntos en el soporte.
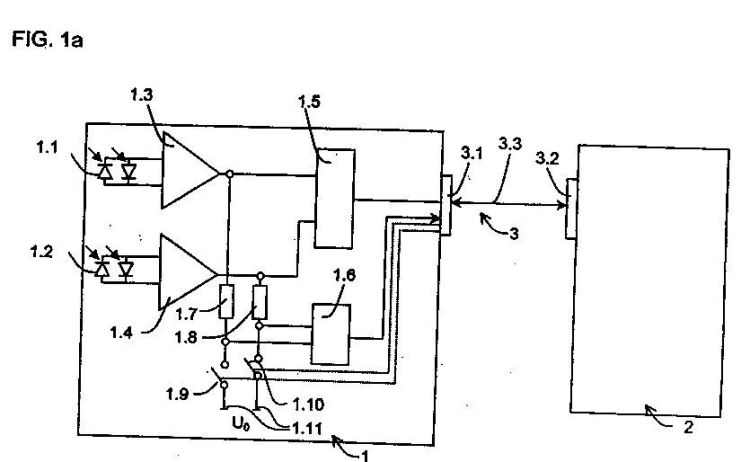
SISTEMA DE MEDICION Y PROCEDIMIENTO PARA CONTROLAR SU FUNCIONAMIENTO.
Sección de la CIP Física
(01/02/2008). Ver ilustración. Inventor/es: HOFBAUER, HERMANN, STRASSER, ERICH. Clasificación: G01D5/244, G01D18/00, G01D5/36, G01D3/08.
Sistema de medición, que está constituido por - un aparato de medición , - otro aparato y - un medio de transmisión de datos para la transmisión de bits de datos entre el aparato de medición y el otro aparato , en el que el aparato de medición presenta - un circuito de supervisión de la señal - y un elemento de conmutación y el elemento de conmutación está en contacto eléctrico con una fuente de potencial de prueba , y el circuito de supervisión de la señal está, además, en contacto con el medio de transmisión de datos.
DISPOSITIVO DE MEDICION DE POSICION CON UNA PISTA INCREMENTAL CON DOS GRADUACIONES DE PERIODO DIFERENTE.
Sección de la CIP Física
(16/12/2007). Ver ilustración. Inventor/es: HOLZAPFEL, WOLFGANG#BENNER, ULLRICH. Clasificación: G01D5/347, G01D5/245.
Un dispositivo de medición de posición, que se compone de una escala y una unidad de exploración que se puede mover respecto a la escala en sentido de la medición (x), donde - sobre la escala se dispone una pista de incremental que se extiende en el sentido de la medición (x), que comprende una graduación de incremental con dos diferentes periodos de graduación (TP1, TP2) y - la unidad de exploración comprende una disposición de detección de señal de incremental , donde la disposición de detección de señal de incremental es adecuada para la generación de señales de incremental (INC1) con un primer periodo de señal aproximado (SP1) y para la generación de señales de incremental (INC2) con un segundo periodo de señal fino (SP2).
METODO Y DISPOSITIVO PARA REDUCIR DESVIACIONES DE MEDIDAS RELACIONADAS CON LA TEMPERATURA EN SISTEMAS DE MEDIDA EN PARALELO.
Sección de la CIP Física
(16/10/2007). Ver ilustración. Inventor/es: NELLE, GUNTHER, DR., TONDORF,SEBASTIAN. Clasificación: G05B19/404.
Estructura conEstructura con sistemas extensómetros dispuestos en una máquina, en paralelo entre sí, en perpendicular a la dirección de medición (X) y a una distancia entre sí, caracterizada por al menos un puente de unión , con geometría independiente de la temperatura, entre los dos sistemas extensómetros para la reducción de desviaciones de medida, debidas a la temperatura, de los sistemas extensómetros , donde el puente de unión está unido sólidamente a un primer sistema extensómetro en un primer punto en la dirección de medición (X), y porque está previsto al menos un aparato de medición que detecta el desplazamiento entre el puente de unión y el segundo sistema extensómetro en la dirección de medición (X).
UN DISPOSITIVO PARA LA GENERACION DE MAGNITUDES DE GUIA PARA CIRCUITOS REGULADORES DE UNA MAQUINA CON CONTROL NUMERICO.
(01/07/2007) Disposición para la generación de magnitudes de guía para circuitos reguladores de una máquina con control numérico, compuesta por una unidad de interpolación para la fijación previa de valores teóricos de posición con una determinada frecuencia de muestreo del interpolador y con una unidad de interpolación fina que está posconectada en serie a la unidad de interpolación y genera, a partir de valores teóricos de posición en el lado de la entrada, magnitudes de guía del lado de la salida para uno o varios circuitos reguladores posconectados, donde la unidad de interpolación fina genera las magnitudes de guía en la retícula de tiempo de los circuitos reguladores con la frecuencia de muestreo del circuito regulador, caracterizada porque la unidad de interpolación fina incluye un transductor de frecuencias de muestreo , así…
PROCEDIMIENTO DE CONTROL DE TRAYECTORIA.
Sección de la CIP Física
(16/05/2007). Inventor/es: FAUSER, MATTHIAS, KALLENBORN, STEVE. Clasificación: G05B19/4093, G05B19/416.
Procedimiento para un control continuo en el cual en el paso (A) de un control numérico se especifican por lo menos dos tolerancias globales, en el paso (B) de un control numérico se especifica una trayectoria de la herramienta con puntos de apoyo (Pn), en los cuales están situados, respectivamente, los vértices de la trayectoria de la herramienta que no sean diferenciables de forma continua, y donde en el paso (C), una unidad de asignación de tolerancias asigna a cada uno de los vértices en un punto de apoyo (Pn) una de las tolerancias establecidas en el paso (A).
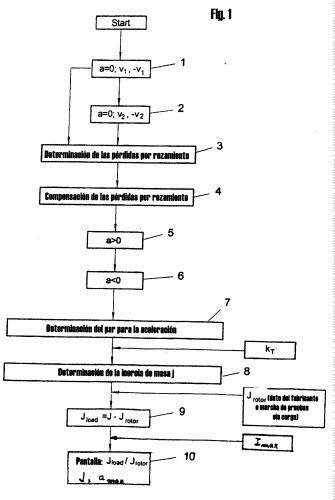
PROCEDIMIENTO PARA DETERMINAR EL MOMENTO DE INERCIA DE UN SISTEMA DE ACCIONAMIENTO POR MOTOR ELECTRICO.
Sección de la CIP Física
(01/03/2007). Ver ilustración. Inventor/es: KERNER, NORBERT, KELLNER, EUGEN. Clasificación: G01M1/10.
Procedimiento para determinar el momento de inercia de masa de un sistema de accionamiento por motor eléctrico de una máquina herramienta, que comprende un motor de accionamiento y otros elementos de accionamiento dispuestos a continuación del motor de accionamiento, y al que le corresponde un sistema de regulación, en el cual a) se determina una corriente de compensación que compensa las pérdidas que se producen durante la velocidad constante del motor, de tal manera que se mantenga constante la velocidad del motor (v), b) se determina la corriente de aceleración (ib) que da lugar a una aceleración definida del motor (a), si están compensadas las pérdidas que se producen durante la velocidad constante del motor (v), c) se calcula la constante del par de giro (kt) del motor de accionamiento, y d) a partir de la corriente de aceleración (iB) y de la constante del par de giro (kt) calculada se calcula el momento de inercia de masas (j).
PROCEDIMIENTO Y DISPOSITIVO PARA COLOCAR UNA REGLA GRADUADA EN UN SUSTRATO.
(01/03/2007) Procedimiento para la colocación alineada de una regla graduada o de un soporte de regla graduada de un sistema medidor de longitudes en una superficie de montaje de un primer cuerpo , en el cual está dispuesto un segundo cuerpo con posibilidad de desplazarse respecto del primero en la dirección de medición (X), donde la colocación tiene lugar mediante pegado por medio de un adhesivo , caracterizado porque - la regla graduada ó el soporte de regla graduada se sujeta a distancia respecto de la superficie de montaje apoyándose en al menos un separador , y en esta posición se alinea mediante desplazamiento del separador…
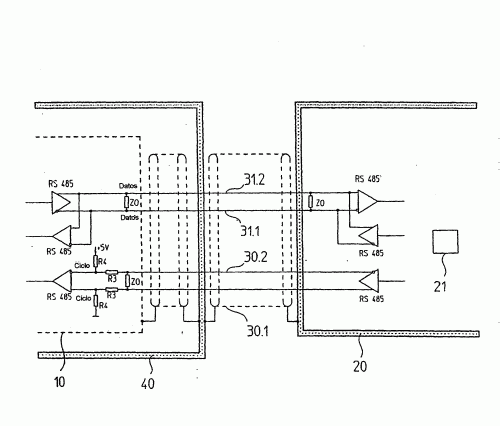
PROCEDIMIENTO Y APARATO PARA LA TRANSMISION DE DATOS ENTRE DIVERSAS UNIDADES DE MEMORIA EN UN SISTEMA DE MEDICION DE LA POSICION.
Sección de la CIP Física
(16/11/2006). Ver ilustración. Inventor/es: STRASSER, ERICH, DIPL.-ING. , MITTMANN, RUDI, DIPL.-ING. Clasificación: G05B19/00, G06F13/00.
Procedimiento para la transmisión de datos entre unidades de memoria (MEM1, MEM2) que están dispuestas en unas primeras y en unas segundas unidades de exploración (AE1, AE2) de uno o de varios sistemas de medición de la posición, donde en las unidades de memoria (MEM1, MEM2) se pueden almacenar en cada caso datos específicos del sistema de medición de la posición, y donde por medio de una línea de transmisión de datos (DL) tiene lugar la transferencia de datos desde una primera unidad de memoria (MEM1) a una segunda unidad de memoria (MEM2), de manera que una vez efectuada la transmisión de datos aparezcan en la segunda unidad de memoria (MEM2) al menos parcialmente los datos específicos de la primera unidad de memoria (MEM1).
UN SISTEMA PARA LA MEDICION DE ANGULOS.
Sección de la CIP Física
(16/11/2006). Ver ilustración. Inventor/es: LAHR, JOHANN. Clasificación: G01D5/347, G01B21/22.
Sistema para la medición de ángulos con una base , un estátor y un acoplamiento para establecer una unión rígida a la torsión de la base con el estátor , para lo cual el acoplamiento permite unos movimientos de compensación radiales y axiales del estátor con respecto a la base , caracterizado porque unos topes en la base y en el estátor limitan los movimientos de compensación.
PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN DISPOSITIVO PARA MEDIR LA POSICION.
Sección de la CIP Física
(01/09/2006). Ver ilustración. Inventor/es: HOFBAUER, HERMANN, HUBER, HELMUT, STRASSER, ERICH, BIELSKI, STEFFEN. Clasificación: G05B19/414.
Procedimiento para el funcionamiento de un dispositivo para medir la posición , a continuación del cual hay una unidad de evaluación para el ulterior tratamiento de los datos de posición, donde tiene lugar la determinación del tiempo del desplazamiento de la señal (tD) entre el dispositivo para medir la posición y la unidad de evaluación , antes del régimen de medición, para lo cual -se solicita del dispositivo para medir la posición la transmisión serial de datos por una línea de datos en sentido hacia la unidad de evaluación , -en un momento inicial definido (t31 t35) se pone en marcha por el lado de la unidad de evaluación un contador , que cuenta en aumento con una frecuencia de recuento predeterminada (fz), -se determina el estado actual del contador (Z) en un momento (t50), en cuanto se detectan por el lado de la unidad de evaluación los datos entrantes, -a partir del estado del contador determinado (Z) se determina el tiempo de desplazamiento de la señal (tD, i).
APARATO DE MEDICION DE ANGULOS Y SU UTILIZACION.
Sección de la CIP Física
(16/06/2006). Ver ilustración. Inventor/es: LAHR, JOHANN, MITTERREITER, JOHANN, RICHTER, DIETMAR. Clasificación: G01D5/347.
Aparato para la medición de ángulos con un componente situado en el exterior, con relación a la dirección radial del eje de giro y un componente situado en el interior, donde los componentes se pueden girar relativamente entre sí alrededor del eje de giro y con por lo menos una junta entre estos componentes , caracterizado porque por lo menos una cara frontal del componente situado en el exterior presenta por lo menos un canal que conduce radialmente hacia el exterior desde la junta y situado más bajo con relación a la cara frontal , estando dispuesta la junta de tal manera que la distancia Y2 entre el fondo del canal y la sección media es menor o igual a la distancia (Y3) entre el contorno exterior , de la junta y la sección media.
PROCEDIMIENTO Y DISPOSITIVO PARA EL MECANIZADO DE ESCOTADURAS CONTORNEADAS DEFINIDAS MEDIANTE CSG.
Sección de la CIP Física
(16/05/2006). Ver ilustración. Inventor/es: VOLLMAYR, NORBERT, WIMMER, MAXIMILIAN. Clasificación: G06T17/10, G05B19/4093.
Procedimiento para el mecanizado de escotaduras contorneadas de una pieza , en el que a un control numérico se le especifica en una fase por lo menos una primera y una segunda superficie elemental , con las siguientes fases ulteriores: 102) Enlace de la primera superficie elemental , con la segunda superficie elemental para formar una superficie compuesta mediante operadores en un listado del contorno , donde el listado del contorno se introduce en el control numérico a través de una pantalla gráfica interactiva , y donde en la pantalla gráfica interactiva se representan teclas virtuales correspondientes a los operadores , con símbolos gráficos que explican los operadores . 103) Evaluación del listado del contorno y cálculo de la superficie resultante del listado del contorno . 104) Representación de la superficie resultante en una pantalla gráfica interactiva.
DISPOSITIVO DE MEDICION DE LA LONGITUD.
(16/05/2006) Dispositivo de medición de longitudes para medir la posición relativa de un primer elemento de máquina con respecto a un segundo elemento de máquina , con - una carcasa que se pueda fijar al primer elemento de máquina ; - una escala graduada situada en el interior de la carcasa , donde la escala graduada va fijada a lo largo de la carcasa discurriendo en la dirección de medida X; - un dispositivo de palpado para el palpado de la escala graduada ; y - una guía lineal con un carril de guiado que se corresponde rígidamente con la carcasa y con un carro de guiado que soporta el dispositivo de palpado , que va guiado por el carril de…
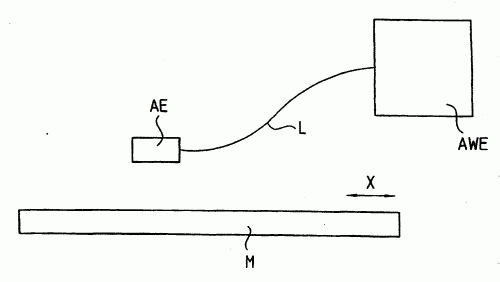
DISPOSITIVO DE MEDICION DE POSICION.
(16/12/2005) Sistema de medición de posiciones con - un código (C), compuesto de una secuencia de elementos código (C1, C2, C3) dispuestos sucesivamente en la dirección de medición X1, donde cada elemento código (C1, C2, C3) está compuesto respectivamente de dos zonas parciales (A, B), que son complementarias entre sí y que están dispuestas consecutivas en la dirección de medición X; - un dispositivo de exploración (AE) con varios elementos detectores (D1 al D11) para explorar varios elementos código (C1, C2, C3) y para formar por lo menos una señal de exploración (S) dentro de cada zona parcial (A, B) de los elementos código explorados (C1, C2, C3)…
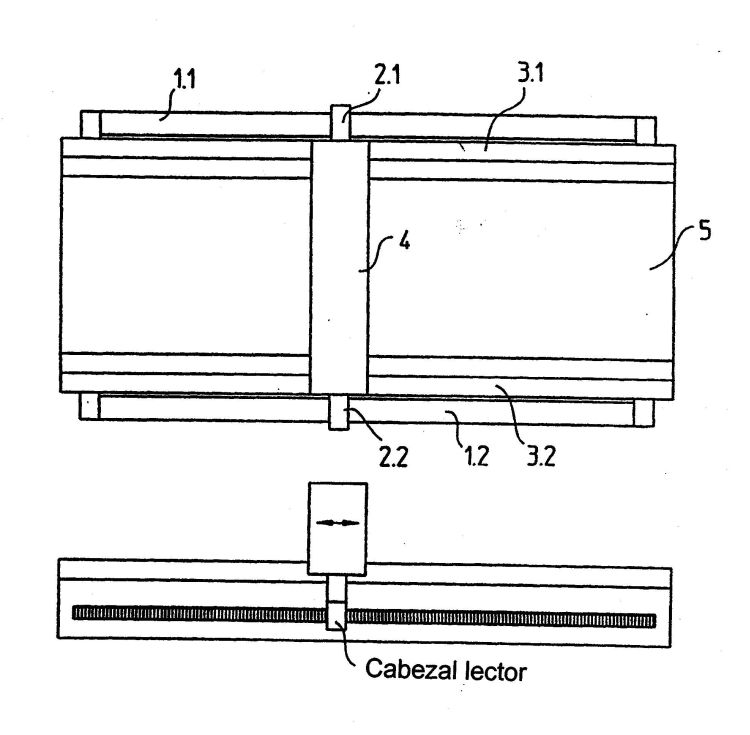
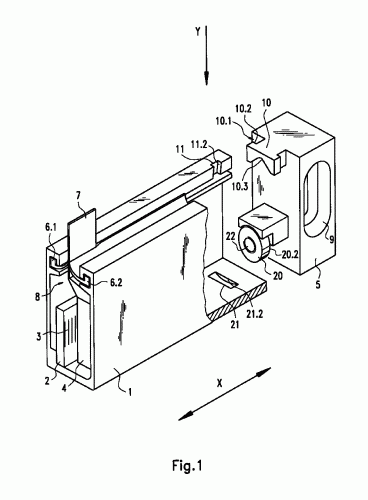
DISPOSITIVO DE MEDICION DE LONGITUDES.
Sección de la CIP Física
(01/11/2001). Ver ilustración. Inventor/es: FIEDLER, KARL. Clasificación: G01D5/347, G01B5/00.
EL DISPOSITIVO DE MEDICION DE LONGITUDES DE ACUERDO CON LA INVENCION CONSISTE EN UNA CARCASA EN FORMA DE TUBO, SELLADA MEDIANTE BLOQUES DE MONTAJE COLOCADOS FRONTALMENTE. MEDIANTE LOS BLOQUES DE MONTAJE SE REALIZA LA FIJACION DE LA CARCASA SOBRE UN OBJETO A MEDIR. LOS BLOQUES DE MONTAJE PRESENTAN UNOS INSERTOS CON RESALTES, QUE SE AGARRAN POR CIERRE DE FORMA EN UNOS REBAJES DE LA CARCASA, Y DE ESTA FORMA BLOQUEAN LA CARCASA CON RESPECTO A LOS BLOQUES DE MONTAJE EN LA DIRECCION DE MEDICION (X).
CAPTADOR OPTOELECTRONICO PARA LA MEDICION DEL RECORRIDO; DEL ANGULO O DE LA ROTACION.
(16/03/2001) SE DESCRIBE UN APARATO DE MEDIDA DE RECORRIDO, DE ANGULO O ROTACION OPTOELECTRONICO, CON UN PORTADOR DE CODIGO DE ILUMINACION PROPIA O ALUMBRADO, EQUIPADO AL MENOS DE UNA PISTA DE CODIFICACION CON CAMPOS OSCUROS Y CLAROS SOBRE EL PORTADOR DE CODIGO, DE UN DISPOSITIVO DE DIAFRAGMA DISPUESTO JUNTO AL PORTADOR DE CODIGO EN FORMA DE UNA PLACA CON LA ZONA TRANSPARENTE A LA LUZ DISPUESTA EN LA PISTA DE CODIGO Y UN SENSOR OPTOELECTRONICO SOBRE LA CARA APARTADA DEL PORTADOR DE CODIGO DEL EQUIPO DE DIAFRAGMA CON LA SUPERFICIE DE SENSOR SENSIBLE A LA LUZ Y DIRIGIDA HACIA ELLA. EL EQUIPO DE DIAFRAGMA DEJA PASAR LA LUZ INFLUENCIADA POR LA PISTA DE CODIGO, CON LO QUE EL…
PROCEDIMIENTO PARA LA DETERMINACION DE CONTORNOS DE TRAYECTORIAS DE HERRAMIENTAS EN MAQUINAS CON MANDO NUMERICO.
Sección de la CIP Física
(16/04/1996). Inventor/es: KORNER, KLAUS-DIETER, DIPL.-PHYS. Clasificación: G05B19/41.
EL PROCEDIMIENTO PUEDE INTERPOLAR, SEGUN LA FIGURA 1B, CURVAS CON UNA EXACTITUD CUALQUIERA. LA EXACTITUD ES PREFIJADA POR UNA MAGNITUD ESCALAR E INDICA LA DESVIACION (D) MAXIMA DE UNA SECCION DE LINEALIZACION CON RELACION A LA CURVA (K). LA DESVIACION (D) MAXIMA SE DEFINE COMO LA LONGITUD DE LA PERPENDICULAR (D) RESULTANTE DE LA INTERSECCION DE LA PERPENDICULAR A LAS RECTAS DE INTERPOLACION ENTRE LOS PUNTOS P1 Y P2 CON LA CURVA (K) Y CON LA RECTA (KI) DE INTERPOLACION. LA AMPLITUD DEL PASO SE DETERMINA DE FORMA DINAMICA, ES DECIR, QUE LA CANTIDAD DE SECCIONES DE LINEALIZACION DEPENDE DE LAS PROPIEDADES CONCRETAS DE LA CURVA, ES DECIR DE LOS PARAMETROS DE LA CURVA.
PROCEDIMIENTO PARA LA DETERMINACION DE CONTORNOS DE TRAYECTORIAS DE HERRAMIENTAS EN MAQUINAS CON MANDO NUMERICO.
Sección de la CIP Física
(16/02/1996). Inventor/es: VOLLMAYR, NORBERT, DIPL.-ING. Clasificación: G05B19/41.
CON EL PROCEDIMIENTO PARA LA MECANIZACION DE PIEZAS SE DETERMINAN, SEGUN LA FIGURA 2, LOS CONTORNOS DE UNA PIEZA POR MEDIO DE PUNTOS (E2, E3; F2, F3; G2, G3; H2, H3) DEL BORDE. ESTOS PUNTOS SE OBTIENEN POR ANALISIS DE LOS PUNTOS DE INTERSECCION CON LA TEORIA DE CONJUNTOS. PARA ELLO SE CUBRE UNA LINEA DE CORTE DE LA SUPERFICIE DE LA PIEZA, QUE CONTIENE UN PLANO DE MECANIZADO, CON UNA RED DE LINEAS (E, F, G, H) AUXILIARES, QUE SE RELACIONAN CON EL CONTORNO DE LA LINEA DE CORTE POR MEDIO DE LAS REGLAS DE BOOL.
PROCEDIMIENTO PARA EL MECANIZADO DE PIEZAS CON MAQUINAS CON MANDO NUMERICO.
Sección de la CIP Física
(16/04/1995). Inventor/es: VOLLMAYR, NORBERT, DIPL.-ING., KORNER, KLAUS-DIETER, DIPL.-PHYS. Clasificación: G05B19/41.
EN ESTE PROCEDIMIENTO SE COMPONEN LAS PIEZAS (FIGURA 2A) CON CUERPOS BASICOS (4A A 4I) (FIGURA 2B) DE FACIL DEFINICION. EN LOS CUERPOS BASICOS (4A A 4I) Y EN SUS CONTORNOS BIDIMENSIONALES SE REALIZAN CORRECCIONES DE LA TRAYECTORIA DE LA HERRAMIENTA (CORRECCION DEL RADIO DE LA FRESA), DE MANERA, QUE, AL AGRUPAR LOS CUERPOS BASICOS CORREGIDOS PARA FORMAR PIEZAS, LOS CONTORNOS CORREGIDOS SE CORTAN MUTUAMENTE Y DEFINEN ASI DE FORMA SENCILLA LOS DATOS DE LA TRAYECTORIA DE LA HERRAMIENTA.
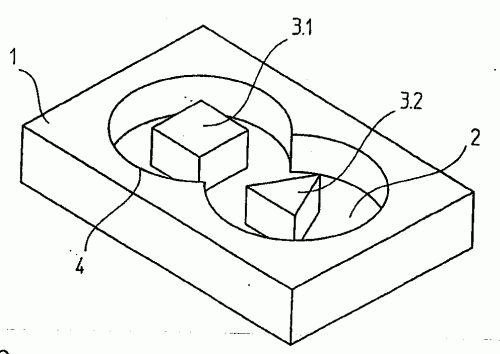
DISPOSITIVO DE MEDICION ANGULAR.
Sección de la CIP Física
(01/06/1994). Inventor/es: SCHWEFEL, ERNST, DIPL.-PHYS., MICHEL, DIETER, DIPL.-ING. , PARRIAUX, OLIVIER, DR. Clasificación: G01D5/38.
UN DISPOSITIVO DE MEDICION ANGULAR TIENE SEGUN LA FIGURA 1 UN DISCO DE DIVISION CON UNA DIVISION CIRCULAR . ESTA DIVISION CIRCULAR ES PALPADA POR UN DISPOSITIVO DE PALPACION (A) DE FORMA INTERFEROMETRICA QUE ESTA CONSTRUIDO COMO CONEXION OPTICA INTEGRADA MONOLITICAMENTE CON DOS ZONAS DE PALPACION DIAMETRALES.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}