CIP-2021 : B25J 1/08 : móviles, montados sobre la pared.
CIP-2021 › B › B25 › B25J › B25J 1/00 › B25J 1/08[1] › móviles, montados sobre la pared.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 1/00 Manipuladores movidos en el espacio manualmente (del tipo control dominado B25J 3/00; micromanipuladores B25J 7/00).
B25J 1/08 · móviles, montados sobre la pared.
CIP2021: Invenciones publicadas en esta sección.
MANIPULADOR PARA UNA CÁMARA DE ULTRA-ALTO VACÍO.
(10/04/2014) Manipulador para una cámara de ultra-alto vacío que comprende una base próxima! (l a) anular fijamente anclable alrededor de una abertura de acceso (2a) de un tanque de la cámara de ultra-alto-vacío, una base dista! (I b) unida a la base próxima! (1a) mediante un elemento de fuelle con un espacio interno (3a) comunicado con la cámara de ultra-alto vacío a través de la abertura de acceso (2a), una columna portamuestras fijada a ¡a base distal (1 b), que atraviesa el espacio Interno (3a) para adentrarse en la cámara de ultra-alto vacío, y un sistema de desplazamiento para desplazar la base distal (1 b) respecto de la base proximal, en el que el sistema de desplazamiento comprende seis actuadores accionados por sendos motores eléctricos dispuestos…
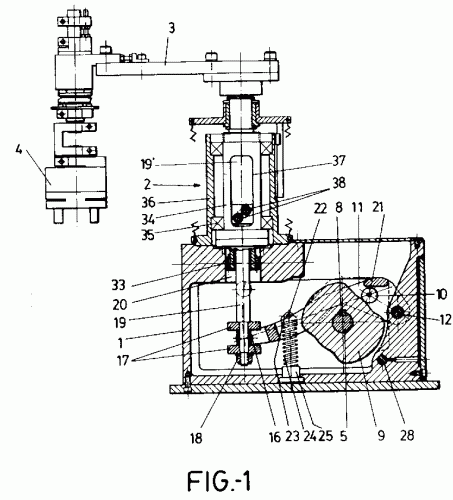
MEJORAS INTRODUCIDAS EN ELEMENTOS MOTRICES PARA MANIPULADORES.
(01/10/1988). Ver ilustración. Solicitante/s: AURKI, S.COOP. LTDA.. Inventor/es: CALVO POZA, FRANCISCO JAVIE.
MEJORAS INTRODUCIDAS EN ELEMENTOS MOTRICES PARA MANIPULADOS. LA INVENCION CONCIERNE A UNA SERIE DE MEJORAS EN LOS ELEMENTOS MOTRICES UTILIZADOS EN MANIPULADORES, DESTINADAS A ELIMINAR LOS CLASICOS PROBLEMAS INERCIALES, EN EL MOMENTO DE PARADA DEL ELEMENTO OPERATIVO DEL MANIPULADOR, CON EL QUE SE LLEVA A CABO EL TRANSPORTE DE LAS PIEZAS DE QUE SE TRATE. CONSISTE EN, A PARTIR DE UN GRUPO MOTO©REDUCTOR, ACOPLAR A SU EJE DE SALIDA, UNA LEVA, PARA DESPLAZAMIENTO AXIAL DEL ARBOL DEL MANIPULADOR. LA LEVA QUE ACTUA SOBRE UNA PALANCA BASCULANTE, RELACIONADA CON DICHO ARBOL, QUE ES PERMANENTEMENTE PRESIONADA CONTRA EL PERFIL DE LA LEVA POR EFECTO DE UNA PAREJA DE LEVAS, IGUALES ENTRE SI PERO EN DISPOSICION CONTRAPUESTA.
{kind=link}