CIP-2021 : B25J 13/08 : por medio de dispositivos sensores, p. ej. a la visión o al tacto.
CIP-2021 › B › B25 › B25J › B25J 13/00 › B25J 13/08[1] › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16).
B25J 13/08 · por medio de dispositivos sensores, p. ej. a la visión o al tacto.
CIP2021: Invenciones publicadas en esta sección.
ESTACIÓN MULTITAREA DE RECOGIDA AUTOMÁTICA PARA LA CLASIFICACIÓN DE MATERIALES A GRANEL.
(06/12/2012). Ver ilustración. Solicitante/s: VAN LOOY, Eric. Inventor/es: VAN LOOY,ERIC.
Estación multitarea de recogida automática para la clasificación de materiales a granel; que comprende: un dispositivo de manipulación de una corriente de material a clasificar, una cinta transportadora de alimentación de los materiales hacia una unidad de detección comprende una unidad o una combinación de sensores distintos para la detección de los materiales a clasificar y unos robots para la separación de los materiales identificados por la unidad de detección. La estación comprende una unidad de proceso que gestiona el funcionamiento de los diferentes elementos de la estación.
Vehículo agrícola y método para calcular la posición.
(29/03/2012) Máquina agrícola, que comprende un vehículo , un mecanismo de elevación acoplable al vehículo y accionable a motor, al cual se puede acoplar un aparato de labranza para ser movido, y un dispositivo para determinar la posición del mecanismo de elevación acoplado al vehículo y/o del aparato de labranza acoplado al mecanismo de elevación, donde el dispositivo comprende una unidad electrónica de control, la cual está conectada con sensores para determinar la posición del mecanismo de elevación y/o del aparato de labranza, donde los sensores se han realizado como acelerómetros , donde por lo menos un primer acelerómetro se ha colocado…
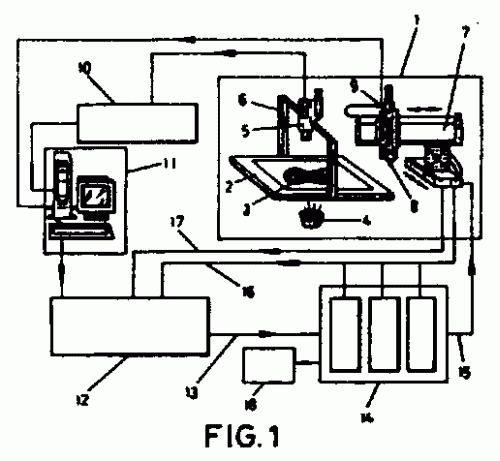
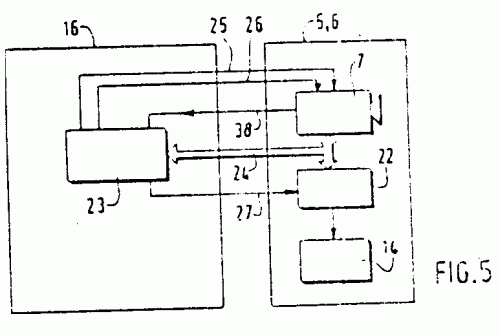
ROBOT CON VISION ARTIFICIAL PARA ENCOLADO AUTOMATICO DE SUELAS DE ZAPATO.
(16/03/2001). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MURCIA. Inventor/es: TOMAS BALIBREA,LUIS MANUEL, MATEO AROCA,ANTONIO.
Robot con visión artificial para encolado automático de suelas de zapato. Cuenta con un manipulador cartesiano de tres ejes dotado de una pistola de encolado y adyacente a una superficie de trabajo donde se ubica la suela a encolar . Bajo dicha superficie hay un sistema de iluminación y sobre ella hay una cámara conectada a una tarjeta de adquisición de imágenes que a su vez conecta con una unidad de control . La unidad de control conecta además con una tarjeta de control de motores que a través de amplificadores hace moverse al manipulador según las coordenadas y trayectorias, definidas por la tarjeta de adquisición de imágenes y correspondientes al contorno de la suela.
UN SISTEMA PARA IMPEDIR EL MOVIMIENTO DE LOS MIEMBROS.
(16/09/1995). Solicitante/s: MASSACHUSETTS INSTITUTE OF TECHNOLOGY. Inventor/es: MAXWELL, SCOTT, M.
SE DESCRIBE UN SISTEMA DE RESISTENCIA A LA LIBERTAD DE MOVIMIENTO DE SEIS GRADOS DE UN MIEMBRO, EN QUE UN SISTEMA ARTICULADO DE ELEMENTOS DE ACOPLAMIENTO Y DE JUNTAS ACOPLA UN PUNTO FIJO EN EL ESPACIO A UN PUNTO FINAL MOVIL (E) DEL SISTEMA ARTICULADO . HAY UNAS ESPOSAS DE ACOPLAMIENTO DE MIEMBROS ACOPLADAS AL PUNTO FINAL (E). SE PUEDE APLICAR UNA FUERZA DE RESISTENCIA VARIABLE AL SISTEMA ARTICULADO , MEDIANTE DE UNOS CONTROLES POR ORDENADOR , A TRAVES DE UNA RUTA DE REALIMENTACION, DESDE UNOS SENSORES DE LA POSICION Y LA VELOCIDAD . LA FUERZA QUE SE APLICA AL PUNTO FINAL DEL SISTEMA ARTICULADO Y QUE ACTUA PARA RESISTIR EL MOVIMIENTO DEL MIEMBRO SE EJERCE EN UNA DIRECCION OPUESTA AL VECTOR DE VELOCIDAD DEL PUNTO FINAL.
SISTEMA DE PRENSION DE PIEZA CONTROLADA POR UN MOTOR RETROALIMENTADO.
(16/03/1994). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: SGARBI, FREDERIC, DETRICHE, JEAN-MARIE.
SISTEMA DE PRENSION DE UN OBJETO . UN CIRCUITO DE DETECCION SE INSTALA EN LAS MANDIBULAS (4 Y 5) DE UNA PINZA. EN EL MOMENTO EN QUE SE COGE EL OBJETO , UN CONMUTADOR HACE BASCULAR EL SISTEMA DE RETROALIMENTACION DE UNA REALIMENTACION EN LA POSICION DE LAS MANDIBULAS DE UN SISTEMA DE REALIMENTACION EN ESFUERZO DE UN MOTOR . SE OBTIENE UNA MAYOR SUAVIDAD EN LA PRENSION. APLICACION EN EL ASIMIENTO DE OBJETOS FRAGILES.
SISTEMA DE DETECCION DE OBJETOS A LOCALIZAR EN UNA ESCENA, ESPECIALMENTE PARA ROBOT DE RECOLECCION.
(01/01/1994). Ver ilustración. Solicitante/s: SOCIETE D'APPLICATIONS GENERALES D'ELECTRICITE ET DE MECANIQUE SAGEM. Inventor/es: CHOQUART, PASCAL, MOREL, NATHALIE, RABATEL, GILLES.
SISTEMA DE DETECCION DE OBJETOS A LOCALIZAR EN UNA ESCENA, ESPECIALMENTE PARA ROBOTS RECOLECTORES. EL SISTEMA COMPRENDE UNA CAMARA DE TOMA DE VISTAS , UN FLASCH Y MEDIOS DE TRATAMIENTO DE IMAGENES. LA CAMARA ES DEL TIPO DE CAPTADOR CCD Y DE TIEMPO DE INTEGRACION VARIABLE. LOS MEDIOS DE TRATAMIENTO DE IMAGENES COMPRENDEN MEDIOS PARA DISPARAR EL FLASH DE MANERA SINCRONIZADA CON LOS PERIODOS DE INTEGRACION DE LA CAMARA Y DETENERLO PARA QUE SOLAMENTE APORTE LA ENERGIA NECESARIA DURANTE DICHOS PERIODOS DE INTEGRACION. EL SISTEMA SE APLICA BIEN A LA DETECCION DE FRUTAS A RECOLECTAR CON AYUDA DE UN ROBOT.
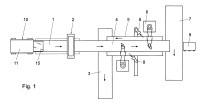
PERFECCIONAMIENTOS EN LOS DISPOSITIVOS PARA LA AUTOMATIZACION DE SISTEMAS OPERATIVOS DE MANO MECANICA Y SIMILARES.
(16/11/1986). Solicitante/s: METALMECCANICA GORI & ZUCCHI M.G.Z. S.P.A.
MODIFICACIONES EN DISPOSITIVOS AUTOMATIZADORES DE SISTEMAS OPERATIVOS DE MANO MECANICO. CONSISTENTES EN: DOTAR AL AUTOMATIZADOR CON UN DISPOSITIVO SENSOR ; CON EL SISTEMA DE POTENCIA ; ASOCIAR AL DISPOSITIVO SENSOR CON UN VISOR O DETECTOR PARA CONSERVAR LA ACTUACION DE LA OPERACION; CONCORDAR AL VASTAGO SENSOR CON EL SISTEMA DE MANIOBRA DE LA MANO MECANICA SOBRE EL QUE ACTUA EL SISTEMA DE POTENCIA ; ACCIONAR AL VASTAGO SENDOR POR UN MANDO DE ESCASA POTENCIA; CONFORMAR AL SENSOR ASOCIADO AL DISPOSITIVO SENSOR COMO UN VISOR OPTICO O FOTOELECTRICO. SE UTILIZA EN EL MONTAJE DE COMPONENTES ELECTRONICOS.
{kind=link}
{kind=link}
{kind=link}