CIP-2021 : G01S 5/00 : Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición;
Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
CIP-2021 › G › G01 › G01S › G01S 5/00[m] › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
G01S 5/02 · usando ondas de radio (G01S 19/00 tiene prioridad).
G01S 5/04 · · La posición de la fuente se determina mediante una pluralidad de localizadores de dirección espaciados.
G01S 5/06 · · La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/12 tiene prioridad).
G01S 5/08 · · La posición de un localizador de dirección único se establece mediante la determinación de la dirección respecto a una pluralidad de fuentes espaciadas de emplazamiento conocido.
G01S 5/10 · · La posición del receptor se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/12 tiene prioridad).
G01S 5/12 · · mediante la coordinación de líneas de posición de forma diferente, p. ej. hiperbólicas, circulares, elípticas o radiales.
G01S 5/14 · · Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
G01S 5/16 · que utilizan ondas electromagnéticas que no sean ondas de radio.
G01S 5/18 · que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
G01S 5/20 · · La posición de la fuente se determina mediante una pluralidad de localizadores de dirección espaciados.
G01S 5/22 · · La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/28 tiene prioridad).
G01S 5/24 · · La posición de un localizador de dirección único se establece mediante la determinación de la dirección respecto a una pluralidad de fuentes espaciadas de emplazamiento conocido.
G01S 5/26 · · La posición del receptor se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/28 tiene prioridad).
G01S 5/28 · · mediante la coordinación de líneas de posición de forma diferente, p. ej. hiperbólicas, circulares, elípticas o radiales.
G01S 5/30 · · Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento y dispositivo para la vigilancia de una zona de riesgo, especialmente una zona de baño.
(24/08/2016) Procedimiento para la vigilancia de un espacio al aire libre, llamado espacio vigilado, por un sistema que comprende:
a. una red informática de vigilancia que comporta medios de emisión-recepción en una banda de frecuencias comprendida entre 135 MHz y 175 MHz (135.106 a 175.106 hercios) según un modo bidireccional no simultáneo y cuya cobertura geográfica es igual o superior a la del espacio vigilado;
b. un dispositivo portátil que comprende un chip de posicionamiento por satélite y medios para emitir y recibir información en la red informática de vigilancia;
c. medios informáticos conectados a la red informática de vigilancia y que comprende en medios de memoria una cartografía georreferenciada del espacio vigilado y un geovallado virtual…
Procedimiento y sistema de localización de terminales móviles.
(18/08/2016). Solicitante/s: RUBIN INFORMATIKAI ZARTKORUEN MUKODO. Inventor/es: PERELLO VALLES,JOSEP, PARADELLS ASPAS,Josep, SANTIAGO MONTILLA,Leonardo Alberto, PAGES ZAMORA,Alba María, VIDAL MANZANO,José, GIMÉNEZ FEBRER,Pedro Juan, SILVA PEREIRA,Silvana, SEYFETTIN DEMIRKOL,Ilker.
Procedimiento y sistema de localización de terminales móviles. Procedimiento y sistema de localización de terminales móviles en un área de búsqueda determinada que comprende un centro de control adaptado para comunicarse con terminales móviles en dicha área, por lo menos cuatro nodos de medida, y por lo menos una consola de visualización configurada para mostrar las indicaciones de localización del terminal móvil a buscar. El centro de control emite una señal de búsqueda para cada uno de los terminales móviles a buscar y los nodos miden la respuesta de cada uno de los terminales móviles, y envían los datos de medida al centro de control. El centro de control calcula la localización aproximada de cada uno de los terminales móviles de la lista final, y envía la localización a la consola de visualización.
PDF original: ES-2579991_A1.pdf
PDF original: ES-2579991_B1.pdf
Sistema para la captación de medios de clientes, que incluye un transceptor RF en un medio de transporte público.
(27/04/2016) Sistema para la captación de medios de clientes, que incluye un transceptor RF en un medio de transporte público, donde el sistema por compartimentos de pasajeros o coche comprende una pluralidad de dispositivos de lectura, que están conectados entre sí y con un tasador, que sirve como unidad a bordo con el objetivo de la comunicación de datos, caracterizado por el hecho de que los dispositivos de lectura están dispuestos de tal manera quedos dispositivos de lectura están dispuestos en paredes laterales opuestas al compartimento de pasajeros o coche, que cubren el espacio hasta la pared opuesta o que dos dispositivos de lectura están dispuestos respectivamente en la zona de cubierta o de fondo, de forma simétrica en torno al eje longitudinal del compartimento de pasajeros o coche, donde, esencialmente, la zona de captación de los dos dispositivos…
Sistema y método de localización de objetos mediante identificadores de radiofrecuencia.
(27/04/2016) Sistema de localización de objetos mediante identificadores de radiofrecuencia, que comprende:
- al menos una unidad objeto , cada una fijada a un objeto a localizar por el usuario y disponiendo de un transpondedor RFID ;
- una unidad de proximidad para ser portada por el usuario , disponiendo de un transpondedor RFID y medios de aviso al usuario ;
donde el sistema está configurado para repetidamente obtener, empleando lecturas de potencia de señal RFID, información relativa a la distancia entre la unidad de proximidad y la unidad objeto , estando la unidad de proximidad configurada para, una vez disponga de dicha información relativa a la distancia al objeto a localizar, avisar al usuario mediante los medios de aviso sobre la distancia al objeto a localizar;
…
Comunicar la posición geográfica de un terminal móvil.
(20/04/2016). Solicitante/s: SISVEL TECHNOLOGY SRL. Inventor/es: PREVITI,GIANLUCA.
Un procedimiento de comunicación entre un terminal llamante (M1) y un terminal llamado (M2), que se pueden conectar entre sí a través de al menos una red de comunicación móvil (R1, R2), comprendiendo dicho procedimiento las etapas de:
- enviar un mensaje de conexión de dicho terminal llamante (M1) a dicho terminal llamado (M2) a través de dicha al menos una red de comunicación (R1, R2),
- enviar un mensaje de respuesta de dicho terminal llamado (M2) a dicho terminal llamante (M1) a través de dicha al menos una red de comunicación (R1, R2), caracterizado porque dicho terminal llamado (M2) está equipado con medios para detectar su posición geográfica, introduce información acerca de su posición geográfica (GPS2) en dicho mensaje de respuesta y envía dicho mensaje de respuesta a dicho terminal llamante (M1).
PDF original: ES-2583430_T3.pdf
Unidad de localización de vehículo inalámbrica de baja potencia.
(20/04/2016) Un método de comunicación inalámbrica entre una unidad de localización de vehículo y una pluralidad de dispositivos periféricos (PD1, PD2) dispuestos sobre o en un mismo objeto, la unidad de localización de vehículo y cada uno de la pluralidad de dispositivos periféricos PD1, PD2) tienen partes de receptor y partes de transmisor, el método comprende:
adaptar la parte de transmisor de cada uno de la pluralidad de dispositivos periféricos (PD1, PD2) para generar señales de transmisión que han de ser recibidas por la parte de receptor de la unidad de localización de vehículo ;
generar señales de transmisión por al menos uno de la pluralidad de dispositivos periféricos (PD1, PD2), en donde las señales de transmisión de cualquiera de la pluralidad de dispositivos periféricos (PD1, PD2) incluyen una señal que tiene un preámbulo…
Sistema de seguimiento de productos/actividad de alta fiabilidad.
(13/04/2016) Sistema de seguimiento (10,10') configurado para rastrear un producto y/o una actividad, y que comprende:
* un dispositivo de rastreo , que está acoplado con un primer receptor de sistema de navegación global por satélite - GNSS - para adquirir datos del mismo; y
* un servidor de verificación , que está acoplado con el dispositivo de rastreo por medio de un medio de comunicación configurado para permitir el intercambio de datos entre dicho dispositivo de rastreo y dicho servidor de verificación ;
estando configurado el primer receptor GNSS para:
* recibir señales desde un GNSS;
* procesar las señales recibidas a fin de obtener GNSS observables; y
* calcular ubicaciones basándose en los GNSS observables; estando configurado el dispositivo de rastreo para:…
Mejora de la relación de señal a ruido en mediciones de localización de posición.
(01/03/2016) Un procedimiento para transmitir señales de localización de posición en un sistema de comunicaciones de multiplexación por división de tiempo, comprendiendo el procedimiento:
generar, en cada una de una pluralidad de fuentes de señales , una ranura de localización de posición correspondiente que presenta una pluralidad de subranuras (260a, 262a, 264a, 266a, 268a), donde cada ranura de localización de posición correspondiente presenta una señal de localización de posición correspondiente a una fuente de señales en una subranura asignada a la fuente de señales; y en el que cada una de la pluralidad de fuentes de señales deja en blanco subranuras de las ranuras de localización de posición correspondientes a las que no están asignadas;
transmitir en un tiempo…
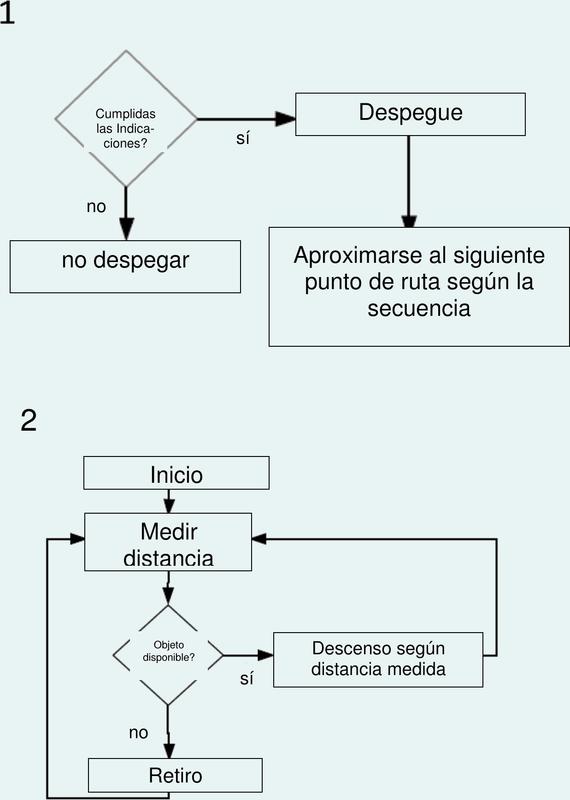
Método de control de un objeto volador para la limpieza de superficies.
(14/01/2016). Ver ilustración. Solicitante/s: AZAIZ, Ridha. Inventor/es: AZAIZ,RIDHA.
Método de control de un objeto volador para la limpieza de superficies que incluye:
-un sistema de sensores para el registro de características geométricas de un objeto y la orientación de un objeto volador respecto del mismo, para limpiarlo mediante un chorro de aire.
PDF original: ES-2647250_T3.pdf
SISTEMA DE LOCALIZACION EN TIEMPO REAL DE OBJETOS MOVILES EN INTERIOR DE TUNELES.
(29/10/2015) Sistema de localización o seguimiento en tiempo real, de personas y objetos móviles en el interior de túneles, con alta densidad infraestructura!, mediante la estimación de longitudes, ángulos o patrones, obtenidos a través de señales electromagnéticas, caracterizado porque el sistema de localización en tiempo real (WILOS-RTLS), está conformado por cuatro medios esenciales para realizar localización, un switch Ethernet fibra óptica/UP , unos dispositivos fijos RTLS , un dispositivo TAG móvil dispuestos en maquinarias y personal y un Software de cálculos de localización ; los dispositivos RTLS reciben una señal inalámbrica interfaz RF correspondiente del dispositivo móvil Tag de posición desconocida, quien emite su señal RF a intermitencia del orden de los mseg; cuando a los menos dos dispositivos fijos…
Prenda para vigilancia segura.
(02/07/2015) 1. Prenda para vigilancia segura que, consistiendo en cualquier tipo de prenda o accesorio de vestir, está caracterizada porque dicha prenda está provista de unos medios de señalización y/o aviso que, asociados a un sensor de proximidad , también incorporado en la prenda , están vinculados a un dispositivo de control a distancia de tal modo que se activan automáticamente cuando el portador de la prenda se aleja del dispositivo de control más allá de la distancia programada en el sensor de proximidad ; y porque dicho dispositivo de control a distancia comprende, al menos, un emisor asociado al receptor del sensor de proximidad y unos medios para programar la distancia de activación de dicho sensor de proximidad .
2. Prenda para vigilancia segura, según…
Compresión de datos contextuales para aplicaciones de geolocalización.
(06/05/2015) Un procedimiento, que comprende:
• recibir datos de localización originales desde un receptor de localización ;
• seleccionar, a partir de un conjunto de perfiles contextuales, un perfil contextual en función de, al menos en parte, los datos de localización originales comparando los datos de localización originales con al menos uno de entre un campo de área geográfica y un campo de aplicación de perfiles contextuales de dicho conjunto;
• seleccionar un procedimiento de compresión en función del perfil contextual seleccionado ; y
• convertir los datos de localización originales a un formato comprimido en función del procedimiento de compresión .
Coherencia de frecuencia en una red de localización.
(22/04/2015) Un método para el seguimiento de la frecuencia de bucle abierto del componente portador de una señal de posicionamiento de referencia recibida en un dispositivo de unidad de posicionamiento , transmitiéndose dicha señal de posicionamiento de referencia mediante al menos un transmisor de referencia , comprendiendo dicho dispositivo de unidad de posicionamiento un receptor , un oscilador común y un reloj de frecuencia orientable conectado a un transmisor , siendo el oscilador común común a dicho receptor y a dicho reloj de frecuencia orientable , comprendiendo dicho método las etapas de: recibir dicha señal de posicionamiento de referencia en dicho receptor ;
medir un desplazamiento del componente portador de la señal de posicionamiento de referencia recibida con respecto a la frecuencia de dicho oscilador común ;
referenciar…
Operación inter-red de redes de localización múltiples.
(07/01/2015) Un método para permitir a un receptor de posición determinar soluciones de posición a partir de señales de posicionamiento de una pluralidad de redes de posicionamiento autónomas dentro de un sistema de posicionamiento, en donde: cada red de posicionamiento autónoma está sincronizada con una base de tiempo diferente;
cada una de dicha pluralidad de redes de posicionamiento autónomas comprende uno o más dispositivos de unidad de posicionamiento ; y
cuando el receptor de posición está situado cerca del límite de la primera y segunda de dicha pluralidad de redes de posicionamiento autónomas , dicho receptor de posición…
Sistema y método para instalación de revestimientos de suelos.
(16/07/2014) Una instalación de revestimiento de suelos que comprende:
a. una pluralidad de losetas , cada loseta que tiene un lado inferior y bordes, colocadas sobre una superficie de suelo; y
b. conectores colocados para abarcar bordes adyacentes de al menos algunas losetas adyacentes, dicho conector comprende:
i. una película ; y
ii. un adhesivo en un lado de la película, en donde el adhesivo es capaz de formar una unión con los lados inferiores de las losetas de manera que, en uso, cuando el conector abarca bordes adyacentes de losetas adyacentes de manera que el adhesivo contacta los lados inferiores de las losetas adyacentes, la fuerza total del adhesivo…
Sistema y procedimiento de formación de un haz de ondas a partir de antenas móviles unas respecto de otras.
(21/05/2014) Procedimiento de formación electrónica de un haz de ondas electromagnéticas dirigidas hacia un objeto a partir de varias antenas emisoras omnidireccionales , estando cada antena fijada sobre una plataforma , siendo distantes las plataformas que incorporan las antenas y siendo móviles unasrespecto de otras, estando dicho procedimiento caracterizado porque comprende al menos las etapas siguientes, repetidas en el tiempo:
- al menos dos plataformas determinan su posición absoluta por medios de localización ;
- determinar las distancias entre las plataformas ;
- determinar las posiciones de las plataformas a partir de las posiciones…
DISPOSITIVO LOCALIZADOR DE PERSONAS MEJORADO.
(14/04/2014) 1. Dispositivo localizador de personas mejorado caracterizado porque comprende, al menos, un localizador electrónico asociado a una placa de telefonía móvil inteligente dotada de su correspondiente antena y tarjeta de identificación de usuario para acceso a la red telefonía móvil, una batería , un puerto (pueden ser varios) de recarga y configuración, todo ello dispuesto en el interior de un cuerpo de plantilla para un zapato del usuario.
2. Dispositivo localizador de personas mejorado según reivindicación 1 caracterizado porque el localizador electrónico se encuentra seleccionado entre:
un…
Sistema y método de seguimiento de vehículos.
(12/03/2014) Un método para determinar un coste de servicio para una llamada de servicio, donde el método comprende:
Recepción de una pluralidad de ubicaciones, donde cada ubicación se asocia a un tiempo y se genera por un dispositivo de localización móvil dirigido por eventos dispuesto en un vehículo de servicio usado por un técnico de servicio en la realización de la llamada de servicio;
Identificación de al menos uno entre evento de parada del vehículo y un evento de viaje del vehículo desde la pluralidad de ubicaciones;
asociación de al menos uno entre duración del evento y una distancia del evento con el evento identificado; y sin intervención de un usuario, determinar automáticamente una cantidad para cargar a un cliente por la llamada de servicio basada en el evento identificado y el asociado en al menos…
Procedimiento y dispositivo para la localización de objetos.
(27/11/2013) Procedimiento para la localización de un objeto que se mueve en un entorno desconocido, conprevisión de k marcas de posición en posiciones indeterminadas distanciadas unasde otras p1, p2,..., pk, con , siendo k un número natural mayor o igual que 3,
medición repetida de la distancia entre objeto y marca de posición paracada una de las marcas de posición independientemente unas de otras parainstantes incontrolados, de manera que para los instantes existen los valores de distancia, y
cálculo de una curva de movimiento**Fórmula** mediante
siendo n el número de mediciones de distancia empleadas y siendo cada función k(t, ti) una función principaldefinida positivamente y…
Método y dispositivo para la sincronización cronológica de una red de ubicación.
(14/11/2013) Un método para sincronizar cronológicamente, en un sistema para permitir la determinación de la posiciónde un receptor de posición itinerante , una señal de posicionamiento única generada por undispositivo de unidad de posicionamiento en una ubicación conocida a la base de tiempo de untransmisor de referencia que transmite al menos una señal de posicionamiento de referencia ,dicho transmisor de referencia estando en una ubicación conocida diferente de la ubicación conocida dedicho dispositivo de unidad de posicionamiento , dicho dispositivo de unidad de posicionamiento comprendiendo un receptor y un transmisor co-situado , y la señal de posicionamiento de referencia conteniendo información de temporización acerca de dicho transmisor de referencia ,comprendiendo el método las siguientes etapas de dicho dispositivo…
Comprobación de validez de información de posición de un vehículo transmitida a través de un enlace de datos sincronizado en el tiempo.
(09/10/2013) Un procedimiento de validación de datos de posición en aplicaciones de vigilancia de vehículos, en el que losvehículos (3, 5, 5') transmiten los datos de posición que indican su propia posición a los vehículos circundantes (3, 5,5'), comprendiendo dicho procedimiento las etapas de:
recibir (S1), en una unidad de recepción , una primera señal (13; 13', 13") que transporta datos deposición que indican una supuesta posición (PADS-B ; PADS-B(5') , PADS-B (15")) de un vehículo, transmitidadesde una fuente de radio (5; 5', 15") a través de un enlace de datos;
estimar (S2) la distancia (dEST , dEST(5'), dEST(15")) entre la unidad de recepción y la fuente de radio (5; 5',15") en base al tiempo de vuelo, TOF, y la velocidad de propagación de la señal recibida (13; 13', 13"), ydeterminar (S3) un valor de desviación…
Verificación de validez de información de posición de un vehículo.
(02/10/2013) Un procedimiento de validación de datos recibidos de posición en aplicaciones de vigilancia de vehículos, en elque los vehículos transmiten datos de posición que indican su propia posición a vehículos circundantes (3, 5; 5')en mensajes en Modo S ES, que son mensajes ADS-B en conformidad con el formato en Modo S ES,caracterizado porque comprende las etapas de:
recibir (S1), con una disposición de antena radiogoniométrica de una unidad de recepción, unaseñal (13; 13', 13") que transporta datos de posición que comprenden un mensaje en Modo S ES, que indicanuna posición supuesta (PADS-B ; PADS-B(5'), PADS-B(15"))…
DISPOSITIVO LOCALIZADOR DE VEHÍCULOS PARA CONTROL DE REPOSTAJE.
(20/08/2013) 1. Dispositivo localizador de vehículos para control de repostaje que, estando instalado en un vehículo, comprende:
un procesador ;
una memoria ;
un circuito GPS ;
un temporizador ; y
un puerto de salida de datos ;
donde el procesador está conectado con la memoria , el circuito GPS , el temporizador y el puerto de salida de datos y caracterizado porque el procesador está configurado para:
leer la posición proporcionada por el circuito GPS ;
leer los datos del temporizador ;
registrar en la memoria la posición proporcionada por el circuito GPS así como los datos leídos del temporizador …
Collar con sistema integrado de identificación por radiofrecuencia.
(29/05/2013) 1. Collar identificativo mediante chip de radiofrecuencia (RFID) integrado que comprende una correa y los componentes habituales para su ajuste y fijación, como hebilla o similar , trabilla y piquete ; y que se caracteriza por presentar un chip electrónico de radiofrecuencia localizado en el interior del collar entre dos capas del material que forma la correa.
2. Collar según las reivindicación 1 y caracterizado porque la cubierta plástica que protege el chip electrónico se cubre de una película adhesiva .
3. Collar según las reivindicaciones 1 y 2 y caracterizado porque el chip electrónico queda inmovilizado en el interior de la correa del collar por dos uniones transversales; una a cada lado del chip…
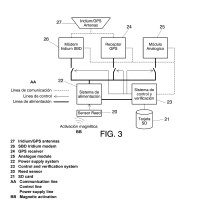
PROCEDIMIENTO DE TRANSFERENCIA DE DATOS ENTRE AL MENOS UNA BOYA LAGRANGIANA DE MEDICIÓN DE CORRIENTES PARA ENTORNOS OCEÁNICOS Y COSTEROS Y UNA ESTACIÓN BASE, Y BOYA LAGRANGIANA DE MEDICIÓN DE CORRIENTES PARA ENTORNOS OCEÁNICOS Y COSTEROS.
(29/05/2013) Procedimiento de transferencia de datos entre al menos una boya lagrangiana de medición de corrientes para entornos oceánicos y costeros y una estación base, y boya lagranciana de medición de corrientes para entornos oceánicos y costeros.
Procedimiento de transferencia de datos entre al menos una boya lagrangiana de medición de corrientes para entornos oceánicos y costeros y una estación base, que comprende capturar datos por parte de la boya mediante los sensores de medición de parámetros y el receptor GPS y almacenarlos un primer fichero que es segmentado en paquetes de una longitud máxima definida por el protocolo Iridium SBD para…
Procedimiento para determinar la posición de personas equipadas con un terminal móvil.
(06/05/2013). Solicitante/s: SWISSCOM AG. Inventor/es: MERGEN,WOLFGANG, HURTER,JURG.
Procedimiento para determinar la ubicación de personas equipadas con un dispositivo móvil a través de una central , con los siguientes pasos:
la central envía un mensaje de localización a través de una red de telefonía móvil al dispositivo móvil de la persona ,
el citado dispositivo móvil recibe el citado mensaje de localización sin indicarlo y sin generar una señal auditiva , el citado dispositivo móvil comprueba un secreto contenido del citado mensaje de localización , en caso de que la citada comprobación arroje un resultado positivo, el mencionado dispositivo móvil responde al citado mensaje de localización con un mensaje de respuesta en el que están incluidas la última o las últimas localizaciones determinadas.
PDF original: ES-2402556_T3.pdf
Procedimiento de determinación de posición.
(29/04/2013) Procedimiento de determinación de posición que comprende los pasos siguientes:
- recepción de al menos cuatro señales de radio (4a-4e) emitidas por estaciones transmisoras diferentes (1a-1e),
- adquisición de una respuesta de impulso del canal de transmisión para cada una de las señales de radio recibidas (4a-4e; S10-S17),
- estimación de la vía de señal directa para cada una de las señales de radio recibidas (4a-4e) con ayuda de larespectiva respuesta de impulso de canal adquirida (S18-S23), y
- determinación de la posición de recepción de las señales de radio por evaluación de las vías de señal directasestimadas de las señales de radio recibidas (4a-4e),
caracterizado porque
las señales de radio emitidas por las diferentes estaciones transmisoras (1a-1e) son…
PROCEDIMIENTO DE TRANSFERENCIA DE DATOS ENTRE AL MENOS UNA BOYA LAGRANGIANA DE MEDICIÓN DE CORRIENTES PARA ENTORNOS OCEÁNICOS Y COSTEROS Y UNA ESTACIÓN BASE, Y BOYA LAGRANGIANA DE MEDICIÓN DE CORRIENTES PARA ENTORNOS OCEÁNICOS Y COSTEROS.
(25/04/2013). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Inventor/es: ALVAREZ DIAZ,ALBERTO, TINTORE SUBIRANA,JOAQUIN, MARTÍNEZ LEDESMA,Miguel, VIZOSO MIQUEL DEL SOLA,Guillermo.
Procedimiento de transferencia de datos entre al menos una boya lagrangiana de medición de corrientes para entornos oceánicos y costeros y una estación base, que comprende capturar datos por parte de la boya mediante los sensores de medición de parámetros y el receptor GPS Y almacenarlos un primer fichero que es segmentado en paquetes de una longitud máxima definida por el protocolo Iridium SBD para su posterior envío a la estación base. Otro objeto de la invención es la boya lagrangiana de medición de corrientes para entornos oceánicos y costeros empleada en el procedimiento.
Verificación de la validez de la información de posición de un vehículo.
(09/04/2013) Un procedimiento para validar datos recibidos de posición en aplicaciones de vigilancia de vehículos, en el quelos vehículos transmiten datos de posición que indican su propia posición a vehículos circundantes (3, 5; 5'),comprendiendo el procedimiento las etapas de:
recibir (S1), con una disposición de antena radiogoniométrica de una unidad de recepción, unaseñal (13; 13', 13") que transporta datos de posición que indican una posición supuesta (PADS-B ; PADS-B(5'),PADS-B(15")) de un vehículo, transmitida desde una fuente (5; 5', 15") de radio;
estimar (S2) el azimut desde la unidad de recepción hasta dicha fuente (5; 5', 15") de radio utilizandodicha disposición de…
Sistema de control de despliegue de ingenios espaciales que deben volar en formación , por determinación simultánea y de gran precisión de sus posiciones.
(08/03/2013) Sistema de control del despliegue inicial de al menos dos ingenios espaciales (ESi) provistos de medios demaniobra (MDi) y que tienen por objeto desplazarse según una formación seleccionada, el sistema de control incluyeun dispositivo de control, caracterizado porque el dispositivo de control está implantado en tierra y comprende i)unos primeros medios de medición (MM1j) que comprenden al menos dos estaciones de medición (SMj)implantadas en tierra en lugares seleccionados y dispuestas cada una para medir sustancialmente de formasimultánea al menos las distancias que las separan de dichos ingenios espaciales, ii) unos medios de tratamiento(MT) acoplados a las dos…
DISPOSITIVO PARA EL SEGUIMIENTO REMOTO DE MASAS DE AGUA Y PROCEDIMIENTO DE GESTIÓN Y OPERACIÓN REMOTAS Y SIMULTÁNEAS DE UN CONJUNTO DE DICHOS DISPOSITIVOS.
(06/03/2013) Dispositivo para el seguimiento remoto de masas de agua y procedimiento de gestión y operación remotas y simultáneas de un conjunto de dichos dispositivos.
Dispositivo de seguimiento remoto de masas de agua mediante un dispositivo de posicionamiento GPS dotado de un módem de telecomunicaciones y una placa de control electrónico, lo que de aquí en adelante será denominado "localizador GPS", encerrado en el interior de un recipiente flotante y estanco, lo que de aquí en adelante se denominará "flotador", así como al procedimiento de gestión y operación simultánea de un conjunto de uno o varios de dichos dispositivos.
DISPOSITIVO PARA EL SEGUIMIENTO REMOTO DE MASAS DE AGUA Y PROCEDIMIENTO DE GESTIÓN Y OPERACIÓN REMOTAS Y SIMULTÁNEAS DE UN CONJUNTO DE DICHOS DISPOSITIVOS.
(20/12/2012). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Inventor/es: GARCÍA CRUZ,Raúl, GUTIÉRREZ ROYO,Francisco Javier, NAVARRO ALMENDROS,Gabriel, RUIZ SEGURA,Javier Tomás.
Dispositivo de seguimiento remoto de masas de agua mediante un dispositivo de posicionamiento GPS dotado de un módem de telecomunicaciones y una placa de control electrónico, lo que de aquí en adelante ser denominado "localizador GPS", encerrado en el interior de un recipiente flotante y estanco, lo que de aquí en adelante se denominar flotador, as como al procedimiento de gestión y operación simultanea de un conjunto de uno o varios de dichos dispositivos.
{kind=link}
{kind=link}
{kind=link}