CIP-2021 : G05D 1/10 : Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/10[1] › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/10 · Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
Plan de vuelo de emergencia.
(30/11/2016). Solicitante/s: SAAB AB. Inventor/es: Petrini,Erik, DURANTI,SIMONE.
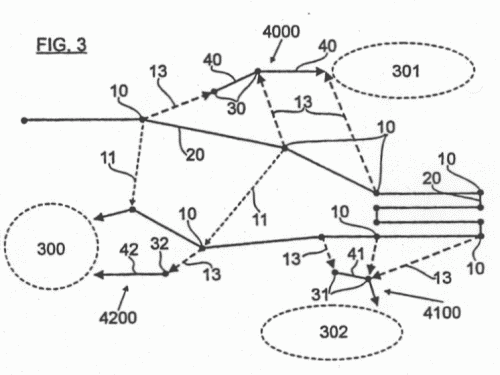
Un plan de viaje de emergencia que se puede utilizar para un vehículo provisto de un sistema de navegación caracterizado porque dicho plan de viaje comprende una matriz de punteros que comprende un número de celdas en la que cada celda de dicha matriz tiene una identificación única y cada celda corresponde a un área geográfica, y en la que cada celda de dicha matriz comprende una identificación de una celda que corresponde a un punto de encaminamiento siguiente en una ruta de emergencia.
PDF original: ES-2616545_T3.pdf
Sistema de guiado de un proyectil.
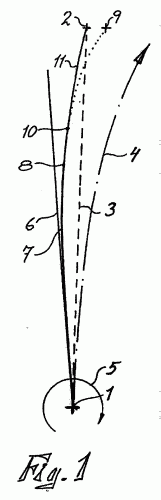
(02/11/2016) Sistema de guiado de un proyectil equipado con al menos un accionador de pilotaje y que incluye medios de medición de parámetros físicos , un calculador de guiado y medios de control de dicho accionador de pilotaje , debiendo dicho proyectil seguir una trayectoria de referencia en los primeros instantes de vuelo e incluyendo dicho calculador de guiado :
- medios de navegación para determinar la actitud y la posición del proyectil en vuelo;
- medios de guiado para elaborar órdenes de guiado a partir de la actitud, de la posición y de la posición del objetivo determinadas por dichos medios de navegación ; y
- medios de pilotaje para establecer órdenes de control, destinadas a dichos medios de control , a partir de dichas órdenes de guiado,
caracterizado por que dicho calculador de guiado incluye, además, medios…
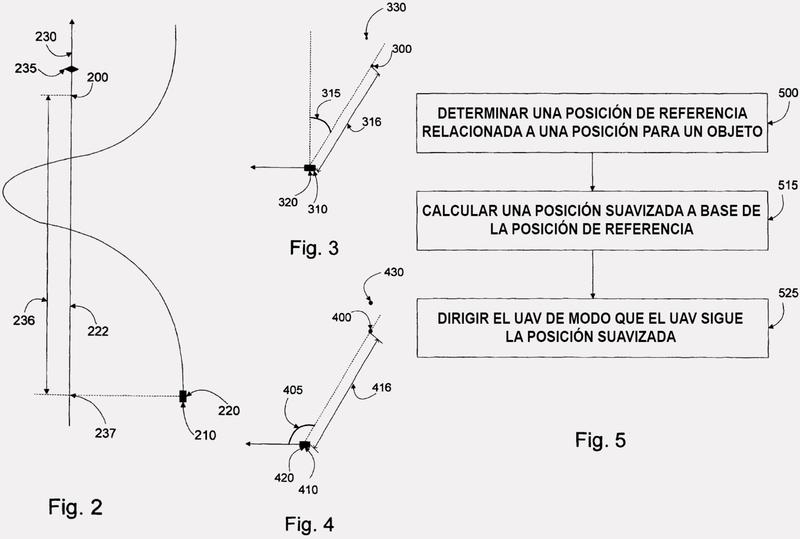
Procedimiento y sistema de dirección de un vehículo aéreo no tripulado.
(26/10/2016). Ver ilustración. Solicitante/s: UMS Skeldar Sweden AB. Inventor/es: MOLANDER,SÖREN, SÖDERMAN,JOHAN, WALDO,MATTIAS.
Un procedimiento de dirección de un UAV, Vehículo Aéreo No Tripulado, para habilitar un comando de alto nivel de dicho UAV, el procedimiento comprende las etapas de:
- determinar una posición de referencia relacionada con una posición para un objeto que dicho UAV debería seguir; estando el procedimiento caracterizado por:
- calcular una posición suavizada en base a en dicha posición de referencia, en el que el cálculo implica regular dicha posición suavizada a dicha posición de referencia, de modo que dicha posición suavizada tiene una frecuencia de movimiento más baja que dicha posición de referencia; y
- dirigir dicho UAV de modo que dicho UAV sigue la posición suavizada.
PDF original: ES-2612163_T3.pdf
SISTEMA DE LOCALIZACIÓN DEL EXTREMO DEL BOOM, DE LA BOCA DEL RECEPTÁCULO DE REPOSTAJE Y DEL TANQUERO.
(26/09/2016) Sistema de localización del extremo del Boom, de la boca del receptáculo de repostaje y del tanquero.
Sistema de localización que comprende unos Medios de localización de la posición del receptor, y por otro lado unos Medios de localización del extremo del Boom que permiten la exacta determinación de sus posiciones e inclinaciones respecto a un sistema de coordenadas común y por ende la posibilidad de acercamiento por medios automáticos si las leyes que controlan a ambos, esto es, Boom y nave receptora son diseñadas apropiadamente y basadas en esta información suministrada por esta invención para su acercamiento final y contacto. Los medios de localización de la posición del receptor…
Vehículo aéreo no tripulado que recupera energía de corrientes ascendentes de aire.
(17/08/2016) Un método para operar un vehículo aéreo no tripulado que tiene una capacidad de planeo dentro de una región geográfica, comprendiendo el vehículo aéreo no tripulado un generador dispuesto para ser accionado por un rotor , comprendiendo el método las etapas de:
indicar la ubicación de al menos una corriente ascendente de aire dentro del área geográfica; y
maniobrar el vehículo aéreo no tripulado dentro de la corriente ascendente de aire identificada;
el método caracterizado por:
definir un umbral máximo de altitud para una región geográfica, por encima del que no se permite el vuelo del vehículo aéreo no tripulado ; y
mantener una altura igual o inferior al umbral máximo de altitud…
SISTEMA Y MÉTODO PARA LA PLANIFICACIÓN DE VUELO AUTÓNOMO.
(11/02/2016). Solicitante/s: UNIVERSIDAD DE ALICANTE. Inventor/es: AZNAR GREGORI,Fidel, RIZO ALDEGUER,Ramón, PUJOL LÓPEZ,Mar.
La presente invención se refiere a un sistema y a un método cuya finalidad es proveer de un mecanismo para permitir la planificación aalto nivel de placas de control de vuelo que implementen el protocolo MAVLINK, logrando ejecutar planes de vuelo dinámicos y con total autonomía adaptándose a las condiciones de la aeronave y del entorno. El sistema toma como base cualquier controlador de vuelo que implemente el protocolo MAVLINK y ejecuta un método de planificación de vuelo autónomo, capaz de proporcionar una capa de funcionalidad inexistente en los controladores de vuelo actuales. El método que se propone permite ejecutar un plan de vuelo de alto nivel, que desarrolle un comportamiento dependiendo no solo del estado de la aeronave, sino del entorno circundante.
Sistema y método para la planificación de vuelo autónomo.
(08/02/2016). Solicitante/s: UNIVERSIDAD DE ALICANTE. Inventor/es: AZNAR GREGORI,Fidel, RIZO ALDEGUER,Ramón, PUJOL LÓPEZ,Mar.
Sistema y método para la planificación de vuelo autónomo.
La presente invención se refiere a un método para la planificación de vuelo autónomo que comprende las siguientes etapas: verificar estado del dispositivo, conectar con el controlador de vuelo, obtener flujo de datos de vuelo del controlador, adquirir flujo de señal y comunicaciones, verificar estado de seguridad del vuelo autónomo, determinar de manera autónoma el siguiente movimiento de la aeronave leyendo los datos del controlador y los sensores y actuando con base al plan de vuelo seleccionado, enviar comandos de vuelo al controlador y registrar el vuelo. La presente invención también se refiere a un sistema que incorpora los medios necesarios para ejecutar el método de planificación de vuelo autónomo.
PDF original: ES-2558732_B2.pdf
PDF original: ES-2558732_A1.pdf
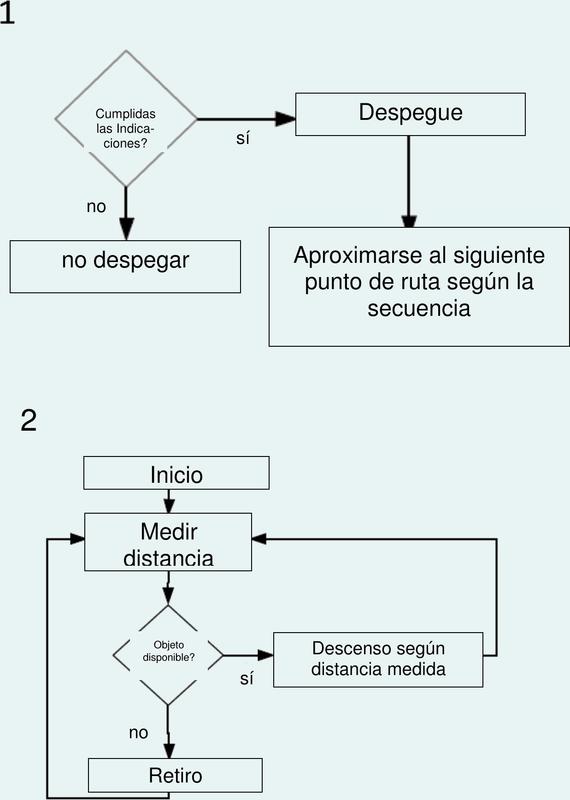
Método de control de un objeto volador para la limpieza de superficies.
(14/01/2016). Ver ilustración. Solicitante/s: AZAIZ, Ridha. Inventor/es: AZAIZ,RIDHA.
Método de control de un objeto volador para la limpieza de superficies que incluye:
-un sistema de sensores para el registro de características geométricas de un objeto y la orientación de un objeto volador respecto del mismo, para limpiarlo mediante un chorro de aire.
PDF original: ES-2647250_T3.pdf
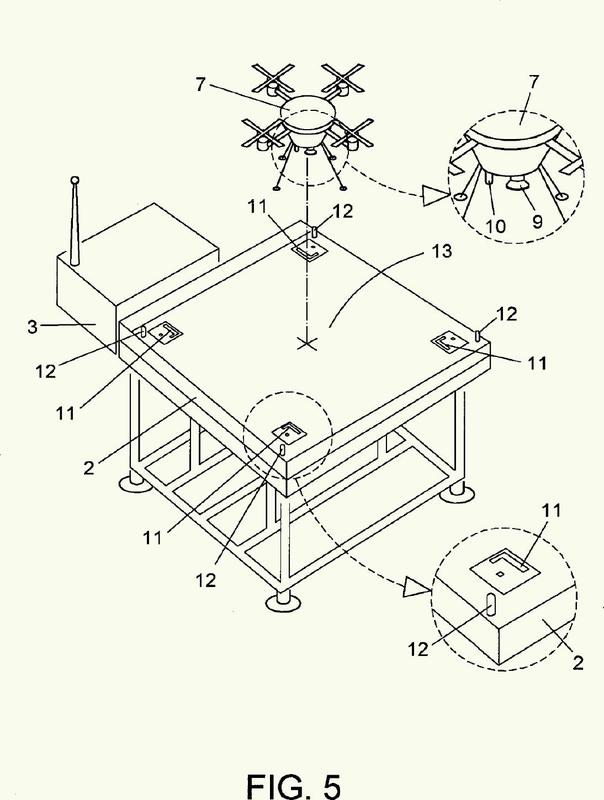
Infraestructura y sistema de gestión móvil para vehículos aéreos no tripulados y métodos relacionados.
(06/01/2016). Ver ilustración. Solicitante/s: THE BOEING COMPANY. Inventor/es: Scarlatti,David, Maza Alcañiz,Ivan, ESTEBAN CAMPILLO,DAVID, CASADO MAGAÑA,ENRIQUE JUAN, CABALLERO BENITEZ,FERNANDO, RAGEL DE LA TORRE,RICARDO.
Una infraestructura y sistema de gestión móvil para vehículo aéreo no tripulado (UAV) para control y gestión de uno o más vehículos aéreos no tripulados (UAV), caracterizado por que el sistema comprende:
al menos una plataforma de aterrizaje para facilitar la disposición operativa del vehículo aéreo no tripulado;
una pluralidad de radiobalizas para la localización del vehículo aéreo no tripulado con la infraestructura y sistema de gestión móvil para UAV;
al menos una estación de mando y control para la comunicación entre la infraestructura y sistema de gestión móvil para UAV y el vehículo aéreo no tripulado; y
al menos un vehículo terrestre no tripulado para el despliegue de la infraestructura y sistema de gestión móvil para UAV en una primera área y, si es necesario, para el despliegue de la infraestructura y sistema de gestión móvil para UAV en una segunda área.
PDF original: ES-2601136_T3.pdf
Evaluación de la capacidad de un sistema para realizar una tarea comparando modelos del sistema y de la tarea.
(25/02/2015) Un método realizado por un vehículo autónomo, comprendiendo el método:
(a) utilizar uno o más sistemas a bordo del vehículo autónomo para evaluar capacidades del vehículo autónomo con respecto a la realización de una tarea, comprendiendo la evaluación de las capacidades:
proporcionar un primer modelo , correspondiendo el primer modelo a la tarea;
proporcionar otro modelo , correspondiendo el otro modelo al vehículo autónomo;
proporcionar una pluralidad de correspondencias de un modelo a otro modelo;
determinar si existe una traza de transformación o bien (i) desde el primer modelo hasta el otro modelo , o (ii) desde el otro modelo hasta el primer modelo , en el que cada traza de transformación…
SISTEMA Y MÉTODO PARA LA VERIFICACIÓN DE LA TRAYECTORIA DE UN TÚNEL.
(07/01/2015) Sistema y método para la verificación de la trayectoria de un túnel.
La invención proporciona un sistema para la verificación de la trayectoria de un túnel . Este sistema comprende, al menos una superficie de recepción adecuada para la recepción de luz láser , sensores adecuados para capturar datos sobre la incidencia del láser en la al menos una superficie adecuada para la recepción de luz láser , un soporte adecuado para sujetar la al menos una superficie de recepción , y medios de procesamiento de información . Los sensores están adaptados para transmitir los datos sobre la incidencia del láser a los medios de procesamiento de la información , y el soporte puede moverse…
Navegación de una aeronave en cuatro dimensiones.
(22/10/2014) Un método de controlar una aeronave para seguir una trayectoria de vuelo de cuatro dimensiones predeterminada que especifica la posición tridimensional de la aeronave sobre un número de puntos en el tiempo, que comprende:
monitorizar una posición a lo largo de la derrota y una posición vertical de la aeronave en relación con las posiciones deseadas correspondientes especificadas por la trayectoria de vuelo de cuatro dimensiones predeterminada para detectar las desviaciones de las posiciones deseadas;
usar los timones de profundidad de la aeronave para corregir las desviaciones de la posición a lo largo de la derrota de la aeronave a partir de la posición a lo largo de la derrota deseada ; y
usar el acelerador de la aeronave para corregir las desviaciones previstas de la posición vertical real de la aeronave a…
SISTEMA DE CONTROL DE AERONAVES NO TRIPULADAS DE ALA ROTATORIA PARA ATERRIZAJE VERTICAL EN SUPERFICIES MÓVILES MEDIANTE PRE-ALIMENTACION DE FUERZAS EN EL SISTEMA DE CONTROL.
(01/08/2014) Mejora del sistema de control para el aterrizaje de una aeronave VTOL no tripulada sobre una plataforma móvil, consistente en la adición de un sistema de control basado en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave, y un módulo de control que toma como entradas la tensión -tanto en magnitud como en dirección-, obtenida de los citados sensores, además de las consignas de control generadas por el controlador de la aeronave. El módulo de control objeto de la invención calcula, a partir de la tensión en el cable, correcciones a introducir en las consignas de control, que se adelantan a las perturbaciones que se producirán en la posición de la aeronave como consecuencia de los cambios…
Dispositivo de estimación de distancia.
(25/06/2013) Un dispositivo de estimación de distancia para ser utilizado en un sistema anticolisión en unaplataforma aérea , comprendiendo dicho sistema anticolisión una unidad de determinación de latrayectoria y un filtro de seguimiento del blanco para seguir un blanco para recuperar un rumbo quecomprende el azimut y la elevación hasta el blanco en base a la salida de al menos un sensor pasivo de cámara o de cámara IR y al calcular una estimación de distancia y estimaciones de distancias deincertidumbre hasta el blanco en base a dichos datos de rumbo y de posición de la unidad dedeterminación de la trayectoria, en el que dicho dispositivo de estimación de distancia comprendeuna unidad de control dispuesta para indicar a un sistema de control de…
Dispositivo de control de posición(es) relativa(s) mediante medidas de potencia de la señal, para un ingenio espacial de un grupo de ingenios espaciales en formación.
(14/06/2013) Dispositivo (D) de control, para un ingenio (Si) espacial de un grupo de ingenios espaciales que tiene por objetodesplazarse según una formación determinada, que comprende un conjunto de al menos tres antenas (Aj) deemisión/recepción implantadas sobre al menos tres caras de orientación diferentes de dicho ingenio (Si) espacial, yadecuadas para emitir/recibir señales de radiofrecuencia, y medios (MT) de tratamiento dispuestos para estimar lasdirecciones de transmisión de las señales emitidas por los otros ingenios (Si') espaciales del grupo a partir de dichasseñales recibidas por dichas antenas (Aj), caracterizado porque comprende:
- unos medios (MC) de control dispuestos para asignar, a cada antena de emisión/recepción,…
Vuelo autónomo para plataformas de vuelo.
(14/03/2013) Un sistema para un vuelo autónomo o semiautónomo de una plataforma de vuelo con accionamientos del vuelo,el sistema comprendiendo un subsistema de estabilización para controlar los accionamientos del vuelo paramantener la estabilización de la plataforma de vuelo en vuelo y un subsistema de control del vuelo para controlar losaccionamientos del vuelo para implantar el control del vuelo de la plataforma de vuelo en vuelo, los dos subsistemasfuncionando separadamente, caracterizado por el hecho de que el subsistema de control del vuelo es anulado por elsubsistema de estabilización en un acontecimiento en el que la plataforma de vuelo exceda de un umbral deestabilización previamente determinado hasta…
Capuchón de presión para recipientes que contienen bebidas y procedimiento de funcionamiento del mismo.
(12/03/2013) Capuchón de presión que es adecuado para ser asentado sobre recipientes que contienen bebidas a fin desolicitarlos con presión, comprendiendo el capuchón de presión :
- una espita que está en unión operativa con un cartucho de gas a través de una disposición de válvula,caracterizado porque
- el cartucho de gas es un cartucho de dióxido de carbono o un cartucho de oxígeno y está dispuesto demanera desplazable contra un mandril por medio de una disposición de palanca ,
- el mandril está dispuesto en un patín que está situado en un rebajo de manera desplazable contra unvástago empujador ,
- un elemento de sellado está dispuesto en un extremo del vástago empujador vuelto hacia el mandril ,
- el vástago empujador está montado de manera desplazable en una coquilla de cojinete y…
Piloto automático visual para vuelo con obstáculo cercano.
(20/06/2012) Un método para evitar colisión de un avión con obstáculos con un eje longitudinal definido por su dirección devuelo comprendiendo los pasos de:
a) definir al menos tres ángulos de observación extendidos dentro de campo de visión frontal
b) adquirir índices de rotación del avión por medios de detección de rotación,
c) adquirir datos visuales en al menos dichos ángulos de observación por al menos un dispositivo de imagen,
d) determinar flujo óptico inducido por traslación en dichos ángulos de observación en base a los índices de rotacióny los datos visuales,
e) para cada ángulo de observación, estimar la proximidad de obstáculos de dicho ángulo de observación en base aal menos el flujo…
Predicción de la trayectoria de una aeronave.
(16/05/2012) Procedimiento implementado por ordenador para proporcionar una descripcion de la intencion de una aeronave expresada usando un lenguaje formal, comprendiendo el procedimiento:
recibir informacion que define como la aeronave ha volado durante un intervalo de tiempo, yalmacenar la informacion en una base de datos de informacion ;
derivar una serie de instrucciones a partir de la informacion almacenada, en el que el conjunto deinstrucciones comprende instrucciones de configuracion que describen la configuracion aerodinamicade la aeronave y las instrucciones de movimiento que describen el movimiento de la aeronave;asegurar que el conjunto de instrucciones cumplen con un conjunto de reglas almacenadas en una base dedatos de reglas , confirmando asi que las instrucciones de configuracion…
Procedimiento de ayuda al aterrizaje de una aeronave utilizando GPS y MLS en el marco de una aproximación axial calculada.
(18/04/2012) Procedimiento de ayuda a la aproximación y al aterrizaje de una aeronave que utiliza un sistema deposicionamiento por satélite y un sistema MLS en el marco de una aproximación axial calculada, comprendiendo elsistema MLS una pista de aterrizaje , una estación de emplazamiento y una estación de azimut ,definiendo la pista de aterrizaje un sistema de referencia cartesiano directo Rc que comprende, como ejes, un ejelongitudinal de la pista de aterrizaje , llamado primer eje (x), un eje transversal de la pista de aterrizaje quepasa por la estación de emplazamiento , llamado segundo eje (y) y un eje perpendicular…
Generador de maniobras de evitación para una aeronave.
(17/04/2012) Un procedimiento para determinar automáticamente una maniobra de evitación en un sistema automático de evitación de colisiones de una aeronave, comprendiendo el procedimiento los pasos siguientes:
- determinar una envolvente de aceleración cinemática máxima, para un número de ángulos de maniobras de evitación, determinando un número correspondiente de aceleraciones cinemáticas correspondientes en un plano de aceleración cinemática, definiendo de esta manera una serie de puntos, e interpolando las separaciones entre los puntos, creando de esta forma la envolvente de aceleración cinemática máxima ;
- formar una envolvente de aceleración cinemática ajustada en el citado…
DISPOSITIVO DE CONTROL DE POSICION(ES) RELATIVA(S) MEDIANTE ANALISIS DE SEÑALES BIFRECUENCIA, PARA UNA NAVE ESPACIAL DE UN GRUPO DE NAVES ESPACIALES EN FORMACION.
(28/05/2010) Dispositivo de control (D), para una nave espacial (Si) de un grupo de naves espaciales destinado a desplazarse según una formación elegida, que comprende:
- al menos un conjunto constituido por una antena de emisión/recepción (A1) y por dos antenas receptoras (A2, A3) implantadas en emplazamientos elegidos en una cara de dicha nave espacial (Si) y apropiadas para emitir y/o recibir señales de radiofrecuencias, estando dispuesta cada antena (A1-A3) de dicho conjunto para emitir y/o recibir señales primeras y segundas que presentan frecuencias primera y segunda elegidas separadas una desviación de frecuencia elegida,
- medios de tratamiento (MT) dispuestos para estimar las direcciones de transmisión de las señales emitidas por las otras naves espaciales del grupo a partir de dichas señales…
SISTEMA DINAMICO PARA EL GOBIERNO DE MOVILES.
(16/05/2008). Ver ilustración. Solicitante/s: ADVANCED DYNAMICS, S.A. Inventor/es: BARCELO RICO-AVELLO,GABRIEL.
Sistema dinámico para el gobierno de móviles.#Se describe un sistema dinámico mediante el que resulta posible llevar a cabo el control de un móvil de cualquier tipo que se mueva en cualquier fluido, líquido o gaseoso, o en el espacio. El móvil se supone con perfil aerodinámico y con desplazamiento estable. El gobierno se realiza en virtud de la incorporación en el móvil de un dispositivo dinámico con momento angular según un eje principal de su elipsoide de inercia, para su aprovechamiento en la generación de una variación espacial de ese momento angular, para la deseada modificación y control de la trayectoria seguida por el móvil.
SISTEMA DE GUIA DE VEHICULO PARA UNA GUIA AUTOMATICA DE VEHICULO.
(16/04/2007) Sistema de guía de trayectoria para la guía de un vehículo respecto a premisas teóricas al menos de una fase de uso, presentando el sistema de guía de trayectoria: - una función de emisión de guión para la emisión de un guión de uso para la descripción de premisas teóricas de fases de uso, según las cuales debe guiarse el vehículo, - al menos, un regulador de trayectoria (12; 12a; 12b; 12c) para la guía del vehículo respecto a las premisas teóricas, - una función de entrada para la emisión de una matriz de regulador por un usuario para la asignación de reguladores de trayectoria a las fases de uso, - un control de uso para el control del ciclo temporal de las fases de uso sobre la base de…
SISTEMA Y METODO DE CONTROL DE UN VEHICULO AEREO NO TRIPULADO.
(16/02/2007). Ver ilustración. Solicitante/s: INSTITUTO NACIONAL DE TECNICA AEROESPACIAL "ESTEBAN TERRADAS". Inventor/es: ANGEL MARTINEZ,FRANCISCO JAV., MORALES DE LA RICA,M. JESUS, IBAÑEZ COLAS,FRANCISCO JOSE, HERRERA MARTIN,ANDRES, DE LA PARRA CARQUE,SERGIO.
Un sistema y método de control de un vehículo aéreo no tripulado, configurado de manera que, en un modo de misión, el vehículo siga la ruta de misión. El sistema comprende medios para almacenar datos indicativos de al menos una ruta auxiliar , de manera que a cada uno de una pluralidad de los segmentos de la ruta de misión , esté asignada al menos una parte de al menos una ruta auxiliar. Además, el sistema comprende medios de cambio de ruta configurados para, como respuesta a un evento de abandono de misión, determinar qué parte de que ruta auxiliar está asignada al segmento de la ruta de misión en la que se encuentra el vehículo, de manera que el vehículo pueda cambiar de la ruta de misión a la ruta auxiliar que corresponda.
SISTEMA, VEHICULO Y METODO DESTINADOS AL COMPORTAMIENTO DE UN VEHICULO.
(16/05/2006) Un sistema para generar bases para tomar decisiones referentes al comportamiento de un vehículo y/o de un conductor de un vehículo, donde el sistema comprende: una unidad de supervisión en forma de dispositivo informático que comprende al menos un elemento de almacenamiento que comprende un grupo de reglas para establecer de qué modo debería comportarse el conductor del vehículo y/o el vehículo en situaciones diferentes, esta unidad de supervisión estando dispuesta para administrar las reglas , una interfaz de usuario que comprende un primer medio para presentar información a un usuario del sistema y un segundo medio para introducir instrucciones a dicha unidad de supervisión …
AERONAVES CON MANDOS DE VUELO ELECTRICOS, PROVISTAS DE UN PILOTO AUTOMATICO.
(01/12/2005) Aeronave con mandos de vuelo eléctricos, provista de timones aptos para ser desplazados por unos accionadores accionados eléctricamente, comportando dicha aeronave: - unos órganos de pilotaje y un ordenador de mandos de vuelo , estando dichos órganos de pilotaje accionados por un piloto y generando unas consignas eléctricas de pilotaje, que son dirigidas a dicho ordenador de mandos de vuelo , generando este último ordenador, a partir de dichas consignas eléctricas de pilotaje y de parámetros de pilotaje, unas órdenes de mando dirigidas a dichos accionadores para el desplazamiento de dichos timones ; y - un piloto automático caracterizada: - porque dicho piloto…
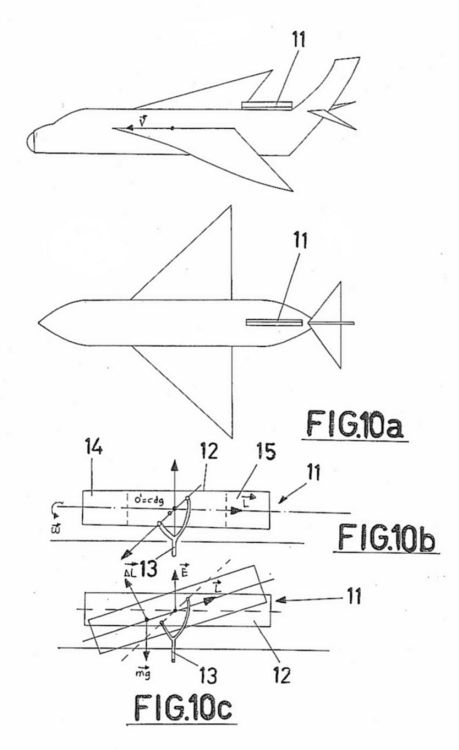
METODO Y DISPOSITIVO PARA CORREGIR LA TRAYECTORIA DE UN PROYECTIL ESTABILIZADO POR GIRO.
(16/09/2005). Ver ilustración. Solicitante/s: BOFORS WEAPON SYSTEMS AB. Inventor/es: ALBREKTSSON, KJELL, WIK, TORSTEN, HELLMAN, ULF.
Método para la corrección lateral del punto de impacto de proyectiles estabilizados por giro, en el que se calcula la diferencia de acimut para cada proyectil entre el punto de impacto de predicción calculado a partir de los datos corrientes del proyectil en un punto de comprobación , en comparación con sus datos de disparo en forma de velocidad de salida del cañón, se calculan datos de puntería en ángulo horizontal y elevación cuando se dispara, caracterizado porque el punto deseado de impacto es corregido al influir en la velocidad de giro del proyectil.
PROCEDIMIENTO DE RECONFIGURACION EN TIEMPO REAL DE TRAYECTORIAS PARA UNA AERONAVE.
(01/11/2004) Procedimiento de reconfiguración, en tiempo real, de una trayectoria para una aeronave, siendo esta trayectoria particularmente ejecutable por un dispositivo de piloto automático, siendo este procedimiento realizado por un computador que recibe en tiempo real informaciones proporcionadas por órganos a borde de la aeronave, respecto a la situación de la aeronave con relación a su entorno espacial y temporal, su autonomía, sus posibilidades de evolución y que almacena datos respecto a la misión de la aeronave que pueden, eventualmente, actualizarse en el curso de la misión, incluyendo una trayectoria nominal en cinco dimensiones: tres dimensiones…
DISPOSITIVO AVISADOR EN MAQUINAS AGRICOLAS.
(01/11/2002) 1. Dispositivo avisador en máquinas agrícolas, aplicable a máquinas cultivadoras y/o cavadoras , caracterizado porque incorpora: - unos medios para el cálculo de un periodo de tiempo predeterminado o una distancia predeterminada entre dos puntos durante el desplazamiento de la máquina agrícola entre dichos puntos y, - unos medios avisadores , asociados a dichos medios para el cálculo de un periodo de tiempo o una distancia, en el supuesto de que se haya transcurrido o sobrepasado el aludido periodo de tiempo o la distancia, sin que dicha máquina agrícola realice una actuación predeterminada. 2. Dispositivo de acuerdo con la reivindicación 1 caracterizado porque el referido medio para el cálculo de un periodo de tiempo predeterminado es un dispositivo temporizador . 3. Dispositivo de acuerdo con la reivindicación 1 ó 2 caracterizado…
REGULADOR INERCIAL DE VELOCIDAD.
(16/10/1998) SE SUMINISTRA UN SISTEMA DE COMANDOS DE VELOCIDAD CON UN MODO DE ESTABILIZACION DE VELOCIDAD EN EL QUE LAS VELOCIDADES REFERENCIADAS DE LA TRAYECTORIA DE VUELO DE UN AVION SON DETERMINADAS CON RESPECTO AL MARCO INERCIAL DE REFERENCIA, LAS VELOCIDADES REFERENCIADAS DE LA TRAYECTORIA DE VUELO SE MANTIENEN CONSTANTES DURANTE LAS MANIOBRAS DE GUIÑADA COMANDADAS POR EL PILOTO DE MANERA QUE EL AVION MANTENGA UNA TRAYECTORIA DE VUELO REFERENCIADA INERCIAL FIJA A PESAR DE LA DIRECCION A LA QUE APUNTE EL AVION. EL CONTROL DE LA VELOCIDAD CON RESPECTO A UN MARCO INERCIAL DE REFERENCIA SE REALIZA CONTROLANDO LA TRAYECTORIA DE VUELO DEL AVION EN BASE A LA ACELERACION LATERAL Y LONGITUDINAL…
UN METODO DE MEZCLA DE ORDENES DEL PLANO DE DERIVA.
(16/02/1998). Solicitante/s: RAYTHEON COMPANY. Inventor/es: FORSMO, DENNES P.
PARA PROPORCIONAR ORDENES DEL PLANO DE DERIVA DE UN VEHICULO UN PILOTO AUTOMATICO REALIZA LOS PASOS DE CALCULAR UNA RELACION DE ORDENES DE CONTROL LONGITUDINAL A CONTROL LATERAL IGUAL A UN VALOR ABSOLUTO DE UNA ORDEN DE CONTROL LONGITUDINAL (UPC) DIVIDIDO POR UNA ORDEN DE CONTROL LATERAL (URC) Y CALCULANDO UNA RELACION DE ORDENES DE CONTROL DIRECCIONAL A CONTROL LATERAL IGUAL A UN VALOR ABSOLUTO DE UNA ORDEN DE CONTROL DIRECCIONAL (UYC) DIVIDIDO POR LA ORDEN DE CONTROL LATERAL (URC), DIFERENCIANDO LA RELACION DE ORDENES DE CONTROL DIRECCIONAL A CONTROL LATERAL PARA PROPORCIONAR UN VALOR DE DIFERENCIA, Y APORTANDO LA ORDEN DE CONTROL LATERAL A AL MENOS UNA DE UNA PLURALIDAD DE PLANOS DE DERIVA DE CONTROL EN RELACION CON EL VALOR DE DICHO VALOR DE DIFERENCIA. CON ESTA DISPOSICION, LA DESVIACION MAXIMA REQUERIDA POR LAS SUPERFICIES DE CONTROL SE REDUCE AL APORTAR MAS CONTROL LATERAL A LOS PLANOS DE DERIVA DE CONTROL QUE TIENEN LA ORDEN DE EVOLUCION MAS PEQUEÑA.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}