CIP-2021 : B63G 8/14 : Control de la posición o de la profundidad (para torpedos F42B 19/00).
CIP-2021 › B › B63 › B63G › B63G 8/00 › B63G 8/14[1] › Control de la posición o de la profundidad (para torpedos F42B 19/00).
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS.
B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H).
B63G 8/00 Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
B63G 8/14 · Control de la posición o de la profundidad (para torpedos F42B 19/00).
CIP2021: Invenciones publicadas en esta sección.
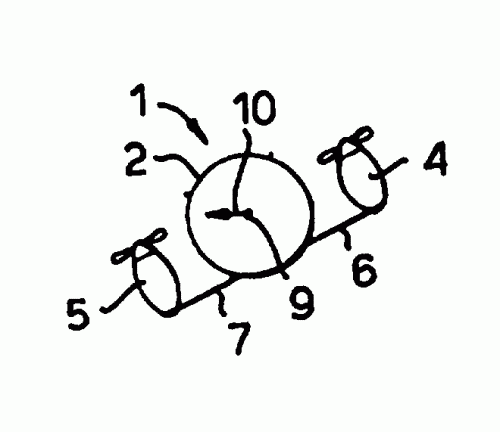
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES.
(16/07/2020). Solicitante/s: UNIVERSIDAD SIMÓN BOLIVAR. Inventor/es: ABRIL HOWARD,Omar Santiago, VILLAREAL GONZALEZ,Reynaldo Farid, PESTANA NOBLES,Juan Pablo, OCHOA PERTUZ,Carlos Andres, RODRIGUEZ,Eugenio Yime.
La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos sumergidos; específicamente relacionado con un equipo para permanecer bajo el agua, los medios para buscar objetos sumergidos con cámaras de buceo unidas mecánicamente a una base de tipo cerrado con control independiente de propulsión y de dirección que consiste en un submarino tipo Vehículo Operado Remotamente (ROV - Remote Operated Vehicle) con seis motores: cuatro motores con empuje en el eje horizontal y dos motores con empuje el eje vertical; donde los motores de empuje horizontal cuentan giran sobre un eje en un ángulo de 0 a 45 grados y donde los motores están ubicados en una estructura adicional que permite el giro y bloqueo de los motores según el ecosistema o las condiciones ambientales a las cuales el Vehículo Operado Remotamente va a ser expuesto).
APARATO SUMERGIBLE CON MEMBRANAS FLEXIBLES DE ESTANQUEIDAD.
(13/02/2012) Aparato sumergible capaz de ser sumergido en totalidad en un medio líquido que comprende: - un cuerpo hueco cerrado de manera estanca, de eje principal longitudinal (A); - al menos un elemento de accionamiento del aparato en desplazamiento horizontal y/o en desplazamiento vertical, que es móvil con respecto al cuerpo hueco a través de una abertura realizada en la pared del cuerpo y que comprende al menos una paleta plana de orientación principal longitudinal, que se extiende al exterior del cuerpo hueco y que está dispuesta al nivel de un extremo axial (12a, 12b) del cuerpo para cooperar con el medio…
SISTEMA PARA MONITORIZAR LA INMERSION DE UN VEHICULO SUBMARINO.
(02/02/2011) Sistema para monitorizar la inmersión de un vehículo submarino.La invención se refiere a un sistema para monitorizar la inmersión de un vehículo submarino que comprende al menos un dispositivo sensorial , y que se caracteriza por el hecho de que comprende un módulo de adquisición de los datos proporcionados por el dispositivo sensorial referentes a la inmersión del vehículo submarino ; un módulo de procesamiento de dichos datos; un módulo de visualización de los datos procesados; y un bus de comunicaciones que interconecta el módulo de adquisición, el módulo de procesamiento y el módulo de visualización de los datos.El sistema de la invención permite mejorar la navegación del vehículo submarino
SISTEMA DE VIGILANCIA DEL ESTADO DE NAVEGACION DE UN SUBMARINO.
(16/12/2002) EL SISTEMA DE SUPERVISION COMPRENDE UN DISPOSITIVO INDICADOR CON UNA SUPERFICIE DE SUPERVISION PARA LA INSTALACION POSTERIOR DE TIMON DEL SUBMARINO, QUE ESTA FORMADA POR LAS PALAS DE TIMON SEPARADAS ANGULARMENTE ENTRE SI, ESTANDO DOTADA LA SUPERFICIE DE SUPERVISION DE VARIOS CAMPOS DE INDICACION PARA LAS PALAS DE TIMON Y PUDIENDOSE AJUSTAR Y LEER GRAFICAMENTE, EN CADA CAMPO DE INDICACION, LA POSICION MOMENTANEA DE DESVIO DE AL MENOS UNA PALA DE TIMON Y PUDIENDOSE RECONOCER A PARTIR DE ELLOS LAS VARIACIONES DE DIRECCION DEL SUBMARINO, EN SENTIDO VERTICAL Y LATERAL, A CAUSA DE LAS POSICIONES ELEGIDAS PARA LAS PALAS DEL TIMON. PARA SIMPLIFICAR EL DIRECCIONAMIENTO DEL SUBMARINO PUEDEN REPRESENTARSE Y LEERSE EN LA CITADA SUPERFICIE DE SUPERVISION , ADEMAS DE LOS DATOS DE…
SISTEMA DE CONTROL PARA PROPULSION SUBMARINA.
(16/02/2000). Ver ilustración. Solicitante/s: MARCONI ELECTRONIC SYSTEMS LIMITED. Inventor/es: ADAMS, RICHARD.
UN VEHICULO SUBMARINO CON UNA FLOTABILIDAD NEGATIVA CONSTA DE UNIDADES IMPULSORAS MEDIANTE LAS QUE PUEDE MANTENERSE EN SUSPENSION. CAMBIANDO LA POSICION DE UNA MASA HACIA PROA O POPA O DE LADO A LADO SE LOGRA LA MANIOBRABILIDAD A VELOCIDAD LENTA MIENTRAS SE MANTIENE EN SUSPENSION, PARA HACER QUE EL VEHICULO CABECEE O ZOZOBRE Y, POR TANTO, DIRIJA EL IMPULSO QUE DE OTRA FORMA SERIA VERTICAL, DE MANERA QUE EL VEHICULO ES IMPULSADO EN LA DIRECCION EN QUE SE HA MOVIDO LA MASA.
{kind=link}