CIP-2021 : G05B 19/427 : Aprendizaje de posiciones sucesivas siguiendo la posición de una palanca de mando o de una palanca para controlar el servoposicionamiento de la cabeza porta-herramienta,
control maestro-esclavo (G05B 19/423 tiene prioridad).
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/427[3] › Aprendizaje de posiciones sucesivas siguiendo la posición de una palanca de mando o de una palanca para controlar el servoposicionamiento de la cabeza porta-herramienta, control maestro-esclavo (G05B 19/423 tiene prioridad).
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/427 · · · Aprendizaje de posiciones sucesivas siguiendo la posición de una palanca de mando o de una palanca para controlar el servoposicionamiento de la cabeza porta-herramienta, control maestro-esclavo (G05B 19/423 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
DISPOSITIVO DE MARCADO DE LA TRAYECTORIA DE TRABAJO DE UN ROBOT, SISTEMA QUE INCORPORA DICHO DISPOSITIVO Y PROCEDIMIENTO PARA LA IDENTIFICACIÓN DE LA TRAYECTORIA DE TRABAJO DEL ROBOT.
(23/05/2018). Solicitante/s: ESTUDIOS DE INGENIERIA ADAPTADA, S.L. Inventor/es: VILA PAPELL,ENRIC, FORCÉN CARVALHO,Juan Ignacio.
Dispositivo de marcado de la trayectoria de trabajo de un robot , sistema que incorpora dicho dispositivo de marcado y procedimiento que permite identificar la trayectoria a seguir el robot para realizar una operación de trabajo sobre una pieza, comprendiendo el dispositivo de marcado unos medios de medida para obtener unos primeros datos de la posición y orientación espacial del dispositivo de marcado ; un patrón de referencia identificable por unos primeros medios de visión por computador para obtener unos segundos datos de la posición y orientación espacial del dispositivo de marcado ; y unos medios de comunicación para enviar los primeros datos de la posición y orientación espacial del dispositivo de marcado obtenida por los medios de medida a una unidad de control conectable al robot.
PDF original: ES-2668930_A1.pdf
Consola portátil de accionamiento a distancia para una máquina herramienta de metrología.
(30/08/2017) Máquina de múltiples ejes para la metrología de engranajes controlada por ordenador, teniendo dicha máquina de metrología un panel de funcionamiento y un monitor del ordenador principal en comunicación con el control del ordenador, estando dicha máquina de metrología caracterizada por comprender, además:
una consola portátil que tiene un monitor de consola y que se comunica con el control del ordenador, siendo dicha consola portátil transportable a ubicaciones alrededor de dicha máquina, siendo dicha consola portátil una extensión de dicho monitor del ordenador principal y comprendiendo una interfaz de usuario no configurable,
por lo que una…
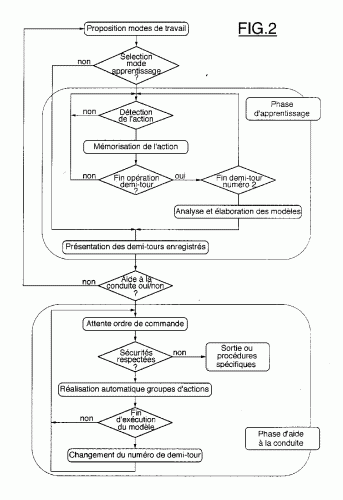
PROCEDIMIENTO DE AUTOMATIZACION DE LAS TAREAS REPETITIVAS EN UNA MAQUINA Y DISPOSITIVO CORRESPONDIENTE.
(16/06/2004). Ver ilustración. Solicitante/s: RENAULT AGRICULTURE CEMAGREF. Inventor/es: DEVAUX, JEAN-FRANCOIS, BERDUCAT, MICHEL, POIRIER, JEAN-PAUL.
EL PROCEDIMIENTO DE AUTOMATIZACION DE LAS TAREAS REPETITITVAS EN UNA MAQUINA, DEL TIPO TRACTOR AGRICOLA, COMPRENDE LAS ETAPAS DE MEMORIZACION DE ACCIONES REALIZADAS POR EL CONDUCTOR Y A CONTINUACION DE REPRODUCCION DE DICHAS ACCIONES TRAS LA RECEPCION DE UNA ORDEN DE CONTROL DEL CONDUCTOR. EL DISPOSITIVO DE PUESTA EN SERVICIO DEL PROCEDIMIENTO COMPRENDE UN CALCULADOR UNA MEMORIA, MEDIOS DE VIGILANCIA DE ORGANOS DE LA MAQUINA A Y POSIBLEMENTE HERRAMIENTAS ASI COMO MEDIOS DE CONTROL DE DICHOS DISPOSITIVOS A.
{kind=link}