CIP-2021 : B62D 57/024 : Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075;
coches que permiten subir o bajar un tramo de escalera B62B 5/02).
CIP-2021 › B › B62 › B62D › B62D 57/00 › B62D 57/024[2] › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
Notas[g] desde B62D 47/00 hasta B62D 63/00: Vehículos de motor o remolque según el tipo; Sus piezas o accesorios no previstos en otro lugar
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES.
B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M).
B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M).
B62D 57/024 · · Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
CIP2021: Invenciones publicadas en esta sección.
Sistema robótico y métodos para tareas de mantenimiento en farolas y estructuras verticales de forma cónica.
(11/05/2020). Solicitante/s: FCC INDUSTRIAL E INFRAESTRUCTURAS ENERGETICAS, S.A.U. Inventor/es: MENESES ALONSO, JESUS, GARCÍA PRADA,Juan Carlos, RUBIO ALONSO,Higinio, CASTEJÓN SISAMÓN,Cristina, GÓMEZ GARCÍA,María Jesús, CORRAL ABAD,Eduardo, BARBER CASTAÑO,Ramon, CRESPO HERRERO,Jonathan, BUSTOS CABALLERO,Alejandro, GOMEZ BLAZQUEZ,Clara, HERNANDEZ SILVA,Alejandra Carolina, DE DIEGO LOPEZ,Ximena, GALLI,Marina, MONTEAGUDO TORTOLA,Rafael, HERCE BENITO,Fernando.
Un sistema robótico destinado a realizar de manera autónoma las tareas de mantenimiento de farolas o estructuras verticales con forma cónica o similar, como por ejemplo el pintado de dichos elementos. El sistema robótico comprende un módulo de tracción que se ajusta a la farola y permite al sistema ascender y descender por ella, un módulo de pintado y un módulo electrónico de control para controlar el ajuste y el movimiento del sistema robótico.
PDF original: ES-2759519_A8.pdf
PDF original: ES-2759519_A1.pdf
PDF original: ES-2759519_B2.pdf
Sistema de desplazamiento para superficies cilíndricas y/o cónicas.
(17/07/2019) Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste , incluyendo:
a. una plataforma de montaje (4a, 4b),
b. una pluralidad de engranajes de desplazamiento conectados, preferiblemente engranajes de desplazamiento idénticos, que en una dirección perimetral, en particular junto con la plataforma de montaje (4a, 4b) integrada entre dos engranajes de desplazamiento , conforman un anillo cerrado,
c. un sistema de expansión , que une al menos los engranajes de desplazamiento entre sí y con el cual puede cambiarse la distancia entre los engranajes de desplazamiento conectados ,
d. al menos otro engranaje de desplazamiento , que está…
Cabezal limpiador para limpiar una superficie, dispositivo que comprende dicho cabezal limpiador y método de limpieza.
(20/02/2019) Cabezal limpiador para limpiar una superficie, tal como el casco de un barco, comprendiendo el cabezal limpiador:
- un bastidor que comprende un eje de boquilla;
- una o más boquillas para limpiar la superficie que están conectadas directa o indirectamente al eje de boquilla del bastidor para suministrar un fluido a la superficie a limpiar;
- medios de disposición magnéticos para disponer el cabezal con respecto a la superficie que están dispuestos en el bastidor o unidos al mismo; y
- un elemento de activación para manipular la distancia entre la superficie y los medios de disposición, estando conectado el elemento de activación a los medios de disposición,
en donde los medios de disposición magnéticos son móviles entre al menos un primer…
Robot escalador para mástiles.
(07/03/2018) Robot escalador para mástiles/torres , en particular para aerogeneradores, que comprende al menos un primer dispositivo de soporte y al menos un segundo dispositivo de soporte, en el que la distancia de los dispositivos de soporte, uno con relación al otro, es modificable en la dirección vertical por medio de al menos un accionamiento lineal, y cada dispositivo de soporte comprende al menos un dispositivo de sujeción por medio del cual el dispositivo de soporte respectivo puede ser sujetado firmemente al mástil/a la torre y ser puede liberado desde el mástil/la torre , en el que al menos algunos de los dispositivos de sujeción, preferiblemente cada uno de los dispositivos de sujeción comprende al menos un elemento de banda que se extiende entre dos puntos de contacto o de sujeción dispuestos sobre el dispositivo de soporte…
Dispositivo para salvar un obstáculo durante el desplazamiento.
(01/02/2017). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: WINDORFER,Harald.
Aparato de limpieza de suelos de desplazamiento automático con un dispositivo para salvar un obstáculo durante el desplazamiento, presentando el dispositivo una rueda de desplazamiento accionada , caracterizado por que en la rueda de desplazamiento se aloja de forma excéntricamente pivotante un elemento de elevación que sobresale con una superficie final anterior de una superficie de rodadura de la rueda de desplazamiento en dirección de desplazamiento (r), previéndose un contra-apoyo fijado en la carcasa.
PDF original: ES-2616303_T3.pdf
Máquina-útil que comprende un carril longitudinal y un brazo transversal.
(24/08/2016). Solicitante/s: AIRBUS OPERATIONS. Inventor/es: ALBERT,FABIEN.
Máquina-útil para la realización de operaciones sobre una pieza que comprende:
* un carril longitudinal configurado para ser posicionado frente a la pieza,
* un brazo transversal , ortogonal al carril longitudinal , que comprende un primer extremo montado en traslación sobre el carril longitudinal ,
* un útil soportado por el brazo transversal;
en la cual un segundo extremo del brazo transversal está provisto de una unidad que comprende un medio de mantenimiento que permite el mantenimiento en posición de la unidad sobre la pieza, caracterizada por que la unidad está motorizada y comprende un sistema de desplazamiento para deslizarse sobre la pieza, paralelamente al carril longitudinal.
PDF original: ES-2600607_T3.pdf
Robot magnético móvil con hueco de aire.
(18/02/2015) Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis está conectado a un módulo de potencia y a una unidad de decapado, en el que dicho módulo de potencia y dicha una unidad de decapado están conectados a un controlador remoto, en el que dicha unidad de decapado está adaptada para suministrar fluido a presión ultra alta en el intervalo de 240-420 MPa al revestimiento de dicha pieza de trabajo, una cubierta que tiene un sello de fluido adaptada para contactar con dicha pieza de trabajo y confinar dicho fluido, en el que dicha cubierta tiene una guía de escape para eliminar…
Instalación para el montaje de piezas de carrocería.
(16/10/2013) Instalación para el montaje de una carrocería de vehículo, que comprende:
- una estación de mecanización para el montaje y/o mecanización de piezas de la carrocería, a la que sepuede alimentar a través de una instalación de transporte de la carrocería a lo largo de una línea detransporte (X) una pieza central de la carrocería que debe mecanizarse/ montarse,
- un bastidor de fijación que se puede equipar con al menos otra pieza de la carrocería,
- un carro de transporte que lleva el bastidor de fijación con al menos dos mecanismos de traslación distanciados entre sí, en el que al menos uno de los mecanismos de traslación presenta unainstalación de accionamiento, y
- una guía de carriles (S) para los mecanismos de traslación , a través de los cuales el bastidor defijación se…
Método y dispositivo de tracción por impulsos.
(19/03/2013) Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma recíproca entre una posición proximal y unaposición distal; teniendo cada elemento de soporte un coeficiente de rozamiento variable con respecto a unasuperficie de soporte (S, W), de tal modo que durante un movimiento de aproximación recíproco predomina unafuerza de rozamiento (Ff1) desarrollada por uno de dichos elementos de soporte (Ff1 >Ff2, Ff1< f2) y durante unmovimiento de alejamiento recíproco de dichos elementos de soporte predomina una fuerza de rozamiento (Ff2)desarrollada…
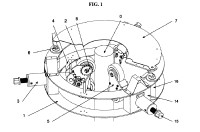
PLATAFORMA ROBÓTICA PARA EL ASCENSO A POSTES.
(31/05/2012). Ver ilustración. Solicitante/s: UNIVERSIDAD DE OVIEDO. Inventor/es: SIERRA VELASCO,JOSE MANUEL, ALVAREZ GONZALEZ,FRANCISCO JOSE, DÍAZ CONZÁLEZ,Juan.
Plataforma robótica para el ascenso a postes que comprende un bastidor formado por cuatro sectores semicirculares articulados dos a dos en planos paralelos. También comprende dos uniones , una desmontable y otra articulada, que unen el bastidor , y permiten cerrar la plataforma y que ésta abrace al poste. Además comprende una cubierta que aloja accesorios, y al menos tres ruedas , dispuestas radialmente que están en contacto con la superficie del poste. También comprende un mecanismo de presión que presiona las ruedas contra el poste, unos medios motores, unos medios de transmisión , y unos medios de control remoto del robot. De aplicación en aquellos sectores en los que se diseñen, fabriquen, produzcan o utilicen plataformas robóticas elevadoras, como por ejemplo el de maquinaria y equipo mecánico, el de material y equipo eléctrico, electrónico y óptico, o material para el transporte.
Sistema y procedimiento de inspección del casco de una embarcación.
(09/05/2012) Sistema de inspección del casco de una embarcación , del tipo que comprende unamáquina móvil equipada con un medio de desplazamiento que permite que se desplace sobre la superficie delcasco de la embarcación, comprendiendo además el sistema un medio de posicionamiento que permite determinar
una posición instantánea de la máquina con respecto a un sistema de coordenadas de referencia (Xref, Yref, Zref),caracterizado porque el medio de posicionamiento comprende:
- una primera y una segunda ruedas de codificación montadas en la máquina, coaxiales y separadas entresí por una distancia entre centros (D) a lo largo de un eje transversal perpendicular a una eje longitudinal…
Robot trepador equipado con una unidad de trabajo, y sistema de control de tales robots trepadores.
(02/05/2012) Robot trepador equipado con una unidad de trabajo, del tipo que comprende:
un chasis , el cual tiene referenciados imaginariamente tres ejes coordenados X, Y, Z, en el que el eje Xestá alineado con una dirección de avance de dicho chasis y el eje Z está dirigido hacia una superficiede trabajo (S) sobre la que se desplaza el robot:
un primer conjunto de patas (2a, 2b) montado de manera desplazable linealmente en la dirección del eje Xrespecto al chasis y provisto de un primer dispositivo de acoplamiento por succión adaptado paraacoplar intermitentemente dicho primer conjunto de patas (2a, 2b) a la superficie de trabajo (S), estandocada pata (2a, 2b) del primer conjunto de patas (2a, 2b) montada de manera extensible en la dirección deleje Z hacia la superficie de trabajo (S), y retraíble de la misma, respecto al chasis ;
un segundo conjunto…
DISPOSITIVO MECANICO TREPADOR APLICABLE A TAREAS DE LIMPIEZA, MANTENIMIENTO, PINTURA O REPARACION DE CUERPOS METALICOS DE GRANDES DIMENSIONES.
(27/10/2011) Dispositivo mecánico trepador aplicable a tareas de limpieza, mantenimiento, pintura o reparación de cuerpos metálicos de grandes dimensiones (pies de generadores eólicos, cascos de grandes embarcaciones, edificios o similar), compuesto de una estructura de aluminio autoportante de cuerpo paralelepípedico, elaborado en materiales ligeros y cuatro patas paralelas dos a dos que, por efecto de tracción magnética, o electromagnética o de succión neumática se adhieren a la superficie metálica de Torres eólicas, Barcos, Edificios o similares. El desplazamiento o tracción que permite al dispositivo deslizarse sobre la superficie del cuerpo tubular se consigue mediante un sistema instalado en cada una de las 4 patas y la capacidad de…
ROBOT TREPADOR LIMPIADOR.
(28/12/2010) El robot trepador limpiador permite realizar trabajos de limpieza en lugares de difícil acceso y peligrosos para las personas. El uso preferente para el que está diseñado es el de la limpieza de torres eólicas. El robot trepador limpiador incorpora un sistema de desplazamiento basado en unas ruedas motrices que permiten el movimiento a lo largo de abscisas y coordenadas por medio del agarre sin rozamiento de un sistema magnético dinámico. Asimismo posee un mecanismo de limpieza mediante vapor, adaptado a un proceso especifico de limpieza
ROBOT TREPADOR EQUIPADO CON UNA UNIDAD DE TRABAJO, Y EQUIPO DE GOBIERNO DE TALES ROBOTS TREPADORES.
(21/06/2010) Robot trepador equipado con una unidad de trabajo, y equipo de gobierno de tales robots trepadores.
El robot comprende un chasis con un primer conjunto de patas (2a, 2b) con ventosas sobre soportes basculantes montado de manera desplazable linealmente respecto al chasis y un segundo conjunto de patas con ventosas montado de manera giratoria respecto al chasis. Unos medios de control están adaptados para controlar el funcionamiento de dichos primer y segundo conjuntos de patas de manera coordinada para desplazar el chasis en cualquier dirección sobre la superficie de trabajo (S). Incluye pies de apoyo y un sistema para nivelar el chasis en relación con una curvatura de la superficie de trabajo. Sobre el chasis está instalada una unidad de trabajo con un cabezal para trabajar en la superficie de trabajo a través de una abertura del chasis.…
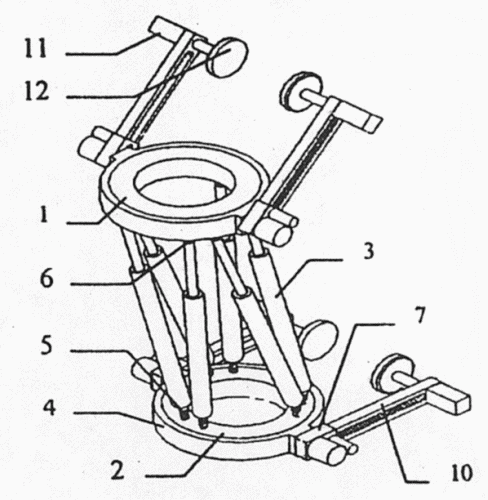
ROBOT PARALELO TREPADOR Y DESLIZANTE PARA TRABAJOS EN ESTRUCTURAS Y SUPERFICIES.
(16/06/2006). Ver ilustración. Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID. Inventor/es: ARACIL SANTOJA,RAFAEL, SALTAREN PAZMIO,ROQUE JACINTO.
Robot paralelo trepador y deslizante para trabajos en estructuras y superficies. La presente invención permite realizar trabajos en sitios de difícil acceso y peligrosos para las personas, como los trabajos en estructuras metálicas de edificios, en centrales nucleares o en estructuras de cúpulas de estadios o coliseos, debajo de puentes metálicos, de limpieza sobre fachadas de edificios, o en el exterior o interior de cascos de barcos o aviones. El dispositivo robótico está basado en una estructura paralela consistente en dos anillos y , que sirven de base, unidos entre sí por seis accionamientos lineales , a través de uniones articuladas del tipo esférico y universal . Además incluye anillos exteriores uno por cada anillo y , que giran en torno a cada anillo y . En los anillos exteriores , se acoplan las patas y los sistemas de fijación y para que el dispositivo robótico pueda trepar, desplazarse y orientarse en su espacio de trabajo.
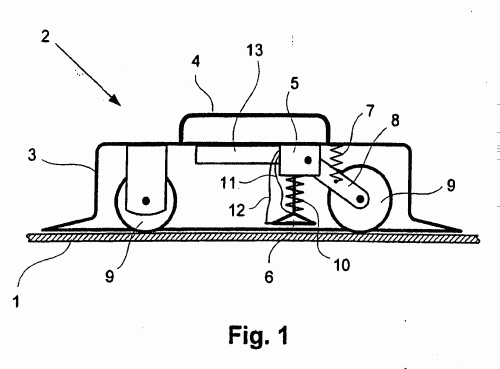
DISPOSITIVO DE SEGURIDAD DESTINADO A UN APARATO QUE SE DESPLAZA SOBRE UNA SUPERFICIE.
(16/10/2005). Ver ilustración. Solicitante/s: BSH BOSCH UND SIEMENS HAUSGERATE GMBH. Inventor/es: DAMRATH, JOACHIM, KONRAD, JURGEN, BRINTRUP, THOMAS.
Dispositivo desplazable sobre una superficie , que para adherirse a la superficie genera una depresión entre el dispositivo y la superficie , con un dispositivo de seguridad que vigila el desprendimiento de la superficie , y con un sistema de sujeción que queda adherido sobre la superficie por el dispositivo de seguridad , al desprenderse de la superficie , y que mantiene el dispositivo móvil contra la superficie , caracterizado porque el dispositivo de seguridad para vigilar el desprendimiento de la superficie , controla la separación del dispositivo con respecto a la superficie.
ROBOT TREPADOR PARALELO PARA EL MANTENIMIENTO DE ESTRUCTURAS TUBULARES.
(01/02/2003) 1. Robot trepador paralelo para el mantenimiento de estructuras tubulares: Caracterizado por ser del tipo de los constituidos por dos anillos y unidos entre sí mediante seis accionamientos lineales de potencia , los cuales se conectan a los mencionados anillos y a través de las juntas esféricas y las juntas universales acopladas en los extremos de cada uno de los seis accionamientos lineales . 2. Robot trepador paralelo para el mantenimiento de estructuras tubulares: según reivindicación anterior, caracterizado por que cada uno de los anillos estructurales y están articulados en su parte media mediante un mecanismo de apertura…
Aparato estabilizado por giróscopo, y en particular un robot bípedo.
(16/05/2002). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: VILLEDIEU, ERIC.
Aparato compuesto por al menos una pierna de apoyo y un cuerpo superior unido a la pierna de apoyo, y configurado a modo de péndulo inverso con relación a la gravedad, en el que el cuerpo superior comprende un molinete giroscópico que gira en torno a un eje de rotación , y que se encuentra alojado en una caja , que se caracteriza porque la caja está conectada al cuerpo superior por medio de una unión mecánica que permite movimientos de rotación según dos ejes no paralelos, incluyendo el aparato captadores que permiten medir un efecto de desequilibrio producido por la gravedad sobre el aparato, medios que permiten equilibrar el aparato ejerciendo esfuerzos antagonistas, apoyando sobre el molinete giroscópico con la ayuda de accionadores , y un sistema de comando asociado, capacitado para sacar provecho de los accionadores y captadores del aparato para equilibrarlo.
(01/03/2002). Solicitante/s: SEEMANN, HENRY. Inventor/es: SEEMANN, HENRY.
UN ROBOT PARA REALIZAR UNA OPERACION DE TRABAJO EN UNA SUPERFICIE. EL ROBOT COMPRENDE UNA ESTRUCTURA QUE SOPORTA UN PAR DE GUIAS PARALELAS . UNA CADENA DE ENLACE SIN FIN ESTA MONTADA PARA DIRIGIR CADA GUIA Y CADA CADENA ES ACCIONADA POR UN MOTOR INDEPENDIENTE MONTADO EN LA ESTRUCTURA. CADA GUIA ESTA PROVISTA CON AL MENOS DOS RECESOS CON CADA RECESO TENIENDO UN LADO ABIERTO ENFRENTE DE LA CADENA CORRESPONDIENTE. UNA SERIE DE VENTOSAS ESTAN MONTADAS EN CADA CADENA Y ADAPTADAS PARA ENGANCHARSE A LA SUPERFICIE A RECORRER. UNA SERIE DE PUERTOS CONECTAN LOS RECESOS DE CADA GUIA Y LOS GRUPOS DE VENTOSAS EN CADA CADENA. UNA FUENTE DE VACIO ESTA CONECTADA A LOS RECESOS Y ACTUA A TRAVES DE LOS PUERTOS PARA QUE LAS VENTOSAS CORRESPONDIENTES PERMITAN QUE LAS VENTOSAS SE AGARREN A LA SUPERFICIE. EL ROBOT SE EMPLEA CON UN SISTEMA DE RASTREO LASER EN LA INSPECCION NO DESTRUCTIVA DE UN AVION.
(01/03/1999) UN DISPOSITIVO PARA VIAJE QUE COMPRENDE MEDIOS DE CHASIS Y MEDIOS DE DESPLAZAMIENTO MONTADOS SOBRE LOS MEDIOS DE CHASIS PARA VIAJAR SOBRE UNA SUPERFICIE DE CARRERA Y QUE COMPRENDE UNA PLURALIDAD DE RUEDAS O UNA PLURALIDAD DE RAILES SIN FIN, INCLUYENDO CADA UNO UNA PLURALIDAD DE RUEDAS PARA CORREA, EN DONDE LOS MEDIOS DE CHASIS INCLUYEN UN ARMAZON PRINCIPAL, UN PAR DE ARMAZONES DE NAVEGACION DISPUESTOS SOBRE LOS LATERALES DEL ARMAZON PRINCIPAL, Y UN ARMAZON DE CONEXION DISPUESTO SOBRE UN EXTREMO DEL ARMAZON PRINCIPAL, EN DONDE LA PORCION CENTRAL DEL ARMAZON DE CONEXION ESTA CONECTADO AL ARMAZON PRINCIPAL A TRAVES DE UNOS MEDIOS ACOPLADOS AL EJE DE NAVEGACION, EN…
DISPOSITIVO MANTENIDO POR SUCCION A LA SUPERFICIE DE UN OBJETO Y MOVIBLE A LO LARGO DE ELLA.
(01/03/1999) PARA PROPORCIONAR UN DISPOSITIVO SUCCIONADO A LA SUPERFICIE DE UN OBJETO Y MOVIBLE A LO LARGO DEL MISMO EN DONDE UN FUERZA DE FRICCION ENTRE UN CIERRE DE SUCCION Y LA SUPERFICIE DEL OBJETO SE REDUCE A TRAVES DE LA VIBRACION DE AL MENOS LA PARTE DEL CIERRE DE SUCCION QUE ESTA EN CONTACTO CON LA SUPERFICIE DEL OBJETO, POR DONDE SE PROPORCIONA UNA FUERZA MOTRIZ ESTABLE. UN DISPOSITIVO CONSTA DE UN ALOJAMIENTO DE REDUCCION DE PRESION, ELEMENTOS DE MOVIMIENTO , UN CIERRE DE SUCCION MONTADO EN LA PRESION QUE REDUCE EL ALOJAMIENTO Y DEFINE UN ESPACIO DE REDUCCION DE PRESION EN COOPERACION CON EL ALOJAMIENTO DE REDUCCION DE PRESION Y LA SUPERFICIE DE UN OBJETO…
APARATO CAPAZ DE ADHERIRSE POR SUCCION A UNA SUPERFICIE Y DE MOVERSE A LO LARGO DE LA MISMA.
(01/10/1997) UN APARATO QUE PUEDE SER SACADO A UNA SUPERFICIE Y MOVERSE A LO LARGO DE LA MISMA QUE CONSTA DE UN CUERPO RECEPTOR DE UNA PRESION, UN DISPOSITIVO DE SEPARACION MONTADO SOBRE EL CUERPO RECEPTOR DE PRESION PARA QUE COOPERE CON EL CUERPO RECEPTOR DE PRESION Y CON LA SUPERFICIE PARA DEFINIR UN ESPACIO REDUCTOR DE LA PRESION, Y UN DISPOSITIVO REDUCTOR DE LA PRESION PARA DESCARGAR UN FLUIDO DEL ESPACIO REDUCTOR DE LA PRESION PARA REDUCIR LA PRESION DEL ESPACIO REDUCTOR DE PRESION. EL DISPOSITIVO DE SEPARACION INCLUYE UNA PORCION DE REBORDE QUE SE EXTIENDE A LO LARGO DE LA SUPERFICIE. EN UNA PORCION DEL DISPOSITIVO, EXCEPTO EN LA PORCION PERIFERICA EXTERIOR DE UNA SUPERFICIE OPUESTA DE LA PORCION DE REBORDE, Y COLOCADOS DE MODO QUE QUEDEN ENFRENTE DE…
DISPOSITIVO CAPAZ DE MOVERSE A LO LARGO DE UNA SUPERFICIE.
(01/04/1995). Solicitante/s: URAKAMI, FUKASHI. Inventor/es: URAKAMI, FUKASHI.
ES UN DISPOSITIVO CAPAZ DE MOVERSE A LO LARGO DE UNA SUPERFICIE QUE COMPRENDE AL MENOS DOS UNIDADES MOVILES (2A, 2B), DONDE DICHAS UNIDADES ESTAN UNIDAS UNA A OTRA POR UNOS MEDIOS DE ACOPLAMIENTO CAPACES DE ESTIRARSE Y CONSTRUIRSE, CADA UNIDAD ESTA PROVISTA DE UNOS MEDIOS DE FIJACION DEL ESTADO PARA FIJAR SELECTIVAMENTE CADA UNA DE LAS UNIDADES (2A, 2B) EN UN ESTADO DE MOVILIDAD A LO LARGO DE LA SUPERFICIE , Y EN UN ESTADO DE COMPROMISO DE SUPERFICIE CON LA SUPERFICIE Y CUANDO UNA DE LAS UNIDADES ESTE FIJADA EN UN ESTADO MOVIL Y LA OTRA EN UN ESTADO DE COMPROMISO DE SUPERFICIE Y LOS MEDIOS DE ACOPLAMIENTO ESTEN ESTIRADOS O CONTRAIDOS, DICHA UNIDAD SE MOVERA A LO LARGO DE LA SUPERFICIE.
(01/04/1995) UN APARATO ROBOT, PREFERIBLEMENTE EN FORMA DE UN ROBOT QUE ANDE , CONSTA DE UN CHASIS Y UNA SERIE DE PATAS ARTICULADAS , CADA PATA CONSTA DE UNA PATA SUPERIOR MONTADA DE FORMA GIRATORIA Y ARTICULADA SOBRE EL CHASIS Y QUE NORMALMENTE SE PROLONGA HACIA ARRIBA DESDE EL, DE UNA PATA INFERIOR ACOPLADA DE FORMA ARTICULADA A LA PATA SUPERIOR Y UN PIE DE AGARRE MONTADO SOBRE LA PATA INFERIOR , ESTANDO NORMALMENTE ESTE PIE DE AGARRE POR DEBAJO DEL CHASIS , Y EL CONTROL DE LA PATA ARTICULADA SE DERIVA DE TRES NEUMATICOS DE DOBLE EFECTO QUE ACCIONAN LOS CILINDROS (17, 18 Y 19), CONECTADO CADA UNO ENTRE EL CHASIS…
{kind=link}
{kind=link}
{kind=link}