CIP-2021 : B63B 59/10 : utilizando carros transportadores o dispositivos análogos que se desplazan a lo largo de la superficie.
CIP-2021 › B › B63 › B63B › B63B 59/00 › B63B 59/10[2] › utilizando carros transportadores o dispositivos análogos que se desplazan a lo largo de la superficie.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS.
B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06).
B63B 59/00 Protección de cascos especialmente adaptada para barcos; Dispositivos de limpieza especialmente adaptados para barcos.
B63B 59/10 · · utilizando carros transportadores o dispositivos análogos que se desplazan a lo largo de la superficie.
CIP2021: Invenciones publicadas en esta sección.
(19/02/2020) Una rueda magnética que comprende:
un bloque de equilibrio que incluye un cuerpo de bloque circular y una primera porción de marco que tiene un diámetro mayor que el cuerpo de bloque circular;
un cuerpo magnético que está provisto en el cuerpo de bloque circular del bloque de equilibrio y une el bloque de equilibrio a un objeto (P) de unión con una fuerza magnética; y
un bloque de protección magnético que está provisto en el bloque de equilibrio y guía un campo magnético generado en el cuerpo magnético hacia el objeto (P) de unión,
un cojinete provisto en el cuerpo de bloque circular para soportar de manera giratoria un eje de soporte que pasa a través del cuerpo de bloque circular,
un miembro de fijación de eje de soporte está provisto para fijar el eje de soporte…
(16/08/2019) 1. Limpiador submarino, conformado por un armazón que porta uno o más equipos de limpieza en una cara de trabajo, caracterizado porque comprende una o más turbinas que impulsan el limpiador hacia su cara de trabajo, una o más ruedas en dicha cara de trabajo y un equipo de flotabilidad configurado para equilibrar el peso del conjunto.
2. Limpiador, según la reivindicación 1, cuyos equipos de limpieza comprenden cepillos rotatorios.
3. Limpiador, según la reivindicación 1, que comprende equipos de limpieza en basculantes con resorte.
4. Limpiador, según la reivindicación 1, cuyo equipo de flotabilidad comprende una serie de boyas perimetrales llenas de gas.
5. Limpiador, según la reivindicación 1, cuyo equipo de flotabilidad comprende cámaras inundables.
6. Limpiador, según…
DISPOSITIVO LIMPIADOR DE REDES PARA ACUICULTURA.
(11/07/2019). Solicitante/s: MIRANDA, Manuel. Inventor/es: MIRANDA,Manuel.
La presente invención se relaciona con un dispositivo limpiador de redes para peces, con capacidad para limpiar redes de cultivos de peces, hasta 70 metros de profundidad. El dispositivo comprende: una estructura que comprende divisiones geométricas para distintos componentes y mecanismos del dispositivo; al menos una base dispuesta sobre la estructura; al menos dos hélices con toberas, dispuestas en partes de las divisiones geométricas de la estructura; y al menos tres núcleos rotativos de alta presión; una pluralidad de discos giratorios que a su vez comprenden cada uno al menos tres inyectores con capacidad de soportar las altas presiones de salida; y una pluralidad de orugas comprendidas en al menos cuatro bandas, para el desplazamiento del dispositivo.
Cabezal limpiador para limpiar una superficie, dispositivo que comprende dicho cabezal limpiador y método de limpieza.
(20/02/2019) Cabezal limpiador para limpiar una superficie, tal como el casco de un barco, comprendiendo el cabezal limpiador:
- un bastidor que comprende un eje de boquilla;
- una o más boquillas para limpiar la superficie que están conectadas directa o indirectamente al eje de boquilla del bastidor para suministrar un fluido a la superficie a limpiar;
- medios de disposición magnéticos para disponer el cabezal con respecto a la superficie que están dispuestos en el bastidor o unidos al mismo; y
- un elemento de activación para manipular la distancia entre la superficie y los medios de disposición, estando conectado el elemento de activación a los medios de disposición,
en donde los medios de disposición magnéticos son móviles entre al menos un primer…
DISPOSITIVO O MÁQUINA AUTOPROPULSADA, PARA LA LIMPIEZA DE FOULING EN CASCOS DE LA OBRA VIVA DE GRANDES BUQUES A FLOTE.
(14/02/2019). Solicitante/s: OCHOA DISSELKOEN, Jose Alberto. Inventor/es: OCHOA DISSELKOEN,Jose Alberto.
Máquina autopropulsada, para la limpieza de fouling de la obra viva de grandes, naves o buques a flote, para luego ser tratados, caracterizada porque está conformado con un medio de soporte , el que está constituido por un bastidor de metal (8a) en el que se fijan, un medio de flotación , un medio de limpieza , un medio de dirección y rodado y medios motorizados , los que de preferencia son hidráulicos o eléctricas.
Robot- máquina automática de pintado de estructuras (R-MAPE).
(09/01/2019). Solicitante/s: ROCA VILARIÑO, David. Inventor/es: ROCA VILARIÑO,David.
Robot-Máquina Automática de Pintado de Estructuras (R-MAPE) dotada de una cabina de supervisión y control , con estructura para movimiento de traslación longitudinal con carro con movimiento transversal y sistema de giro de torre telescópica con movimiento vertical , brazo telescópico horizontal y robot de pintado . Incorpora sistema de almacenamiento con depósitos para pintura y bombas neumáticas para impulsión de pintura a la pistola incorporada en el robot . Incorpora cámaras de control de vigilancia y hardware de visión artificial mediante escáner láser 3D , cámaras inteligentes 3D, sensores de distancia focal y láser de medición integrado en robot para reconocimiento de geometría estructural y acabado superficial, con adquisición de imágenes y posterior procesado de las mismas con software de visión con el que se consigue trayectoria y guiado de robot para el pintado automático de la estructura.
PDF original: ES-2695627_A1.pdf
(09/01/2019) Un dispositivo de oruga que comprende:
una parte de eliminación de película de agua que se proporciona en un miembro (C) de transmisión de potencia que incluye cadenas, presiona y elimina una película de agua entre un objeto de conexión como un material magnético y el miembro (C) de transmisión de energía con una fuerza magnética, y une el miembro de transmisión de potencia al objeto de conexión para asegurar una fuerza de fricción;
caracterizado porque
se proporciona una parte de conexión de imán en cuerpo de aparato que está conectada al miembro (C) de transmisión de potencia y une el cuerpo del aparato al objeto de conexión, y
en el que la parte de eliminación de película de agua incluye:
…
DISPOSITIVO AUTÓNOMO PARA PINTAR PAREDES EN INTERIORES.
(06/12/2018). Solicitante/s: UNIVERSIDAD TECNOLÓGICA DE PANAMÁ. Inventor/es: ABAD JARAMILLO,Carmen Maria, MONDO,Jean Marie, IGUALAS LAMELA,Cedrick Rijkaard, ORTEGA BADILLO,Grimaldo Moises, GOMEZ,Nelida.
Comprende: cuerpo de pintar, que soporta: recipiente para pintura, con tapón de recipiente; contrapeso, con depósito rellenable de material de contrapeso, y tapón de contrapeso; y panel de dispersión para dispersar pintura en pared. También comprende: cables conectados a lados de parte superior de cuerpo de pintar, para suspender cuerpo de pintar; motores eléctricos, para tensar y recoger cables, para desplazar cuerpo de pintar; postes extensibles ajustables, para soportar motores, comprendiendo cada poste: dos tubos conectados; y ventosas montadas en extremos libres de tubos, para fijar separablemente cada poste a punto inferior y a punto superior. Dispositivo comprende además unidad de control, para coordinar los motores y el panel de dispersión de acuerdo con programas.
Robot magnético móvil con hueco de aire.
(18/02/2015) Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis está conectado a un módulo de potencia y a una unidad de decapado, en el que dicho módulo de potencia y dicha una unidad de decapado están conectados a un controlador remoto, en el que dicha unidad de decapado está adaptada para suministrar fluido a presión ultra alta en el intervalo de 240-420 MPa al revestimiento de dicha pieza de trabajo, una cubierta que tiene un sello de fluido adaptada para contactar con dicha pieza de trabajo y confinar dicho fluido, en el que dicha cubierta tiene una guía de escape para eliminar…
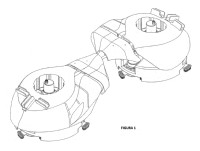
Sistema robótico para la limpieza de cascos de barcos y otras superficies sumergidas.
(06/06/2014) Sistema robótico para la limpieza de cascos de barcos y otras superficies sumergidas.
La presente invención consiste en un robot que realiza la limpieza de superficies sumergidas, tanto curvas como planas, con cualquier orientación. Además, dicho robot es capaz de solventar cualquier obstáculo presente en las mismas, así como trasladarse a superficies dispuestas en distinto plano. Está caracterizado por tener dos módulos idénticos compuestos de una cámara de succión y de una carcasa, con capacidad para rotar una con respecto a la otra, y unidos mediante un brazo que permite movimientos relativos entre ellos.
SISTEMA ROBÓTICO PARA LA LIMPIEZA DE CASCOS DE BARCOS Y OTRAS SUPERFICIES SUMERGIDAS.
(15/05/2014). Ver ilustración. Solicitante/s: UNIVERSIDADE DA CORUÑA. Inventor/es: LOPEZ PEÑA,FERNANDO, FAIÑA RODRIGUEZ-VILA,Andres, DURO FERNANDEZ,Richard, SOUTO GARCIA,Daniel.
La presente invención consiste en un robot que realiza la limpieza de superficies sumergidas, tanto curvas como planas, con cualquier orientación. Además, dicho robot es capaz solventar cualquier obstáculo presente en las mismas, así como trasladarse a superficies dispuestas en distinto plano. Está caracterizado por tener dos módulos idénticos compuestos de una cámara de succión y de una carcasa, con capacidad para rotar una con respecto a la otra, y unidos mediante un brazo que permite movimientos relativos entre ellos.
DISPOSITIVO ROBOTIZADO DE LIMPIEZA DE ESTRUCTURAS METALICAS FERRICAS.
(07/06/2012). Solicitante/s: ELIOT SYSTEMS, S.L. Inventor/es: MASIA PERALES,Jordi.
Dispositivo robotizado de limpieza de estructuras metálicas férricas que comprende dos brazos simétricos de limpieza y un dispositivo tractor de tipo de oruga con desplazamiento mediante suelas magnéticas sobre las bandas de dicho robot oruga; y donde dichos brazos están solidariamente unidos al dispositivo tractor mediante un perfil estructural y constan esencialmente de un rodillo de limpieza accionado cada uno de ellos por un motor reductor acoplado a dicho rodillo y una pluralidad de boquillas.
DISPOSITIVO ROBOTIZADO DE LIMPIEZA DE ESTRUCTURAS EXTERNAS DE ACERO.
(07/06/2012). Ver ilustración. Solicitante/s: ELIOT SYSTEMS, S.L. Inventor/es: MASIA PERALES,Jordi.
Dispositivo robotizado de limpieza de estructuras externas de acero que comprende dos brazos simétricos de limpieza y un dispositivo tractor de tipo de oruga con desplazamiento mediante suelas magnéticas sobre las bandas de dicho robot oruga; y donde dichos brazos están solidariamente unidos al dispositivo tractor mediante una pluralidad de perfiles estructurales y constan esencialmente de un rodillo de limpieza accionado cada uno de ellos por un motor reductor acoplado a dicho rodillo y una pluralidad de boquillas.
APARATO CONTROLADO POR ORDENADOR PARA EL ACABADO DE SUPERFÍCIES DE EMBARCACIONES MARÍTIMAS.
(12/01/2011) Un aparato controlado por ordenador para el acabado de superficies de embarcaciones y para pintar las superficies del casco y de la superestructura de una embarcación marítima que tiene un casco, que comprende una pluralidad de robots , controlados por dicho ordenador , montados sobre medios móviles con relación a dicha embarcación marítima y una pluralidad de herramientas intercambiables (50, 60, 70 y 80) acopladas a dichos robots , dichas herramientas intercambiables (50, 60, 70 y 80) comprenden: una herramienta analizadora para mapear los contornos superficiales de dicha embarcación marítima , dicha herramienta analizadora está adaptada para detectar los contornos superficiales y determinar las imperfecciones de acuerdo con un sistema de mapeo…
ROBOT TREPADOR LIMPIADOR.
(28/12/2010) El robot trepador limpiador permite realizar trabajos de limpieza en lugares de difícil acceso y peligrosos para las personas. El uso preferente para el que está diseñado es el de la limpieza de torres eólicas. El robot trepador limpiador incorpora un sistema de desplazamiento basado en unas ruedas motrices que permiten el movimiento a lo largo de abscisas y coordenadas por medio del agarre sin rozamiento de un sistema magnético dinámico. Asimismo posee un mecanismo de limpieza mediante vapor, adaptado a un proceso especifico de limpieza
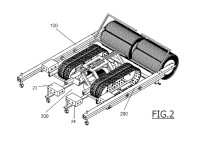
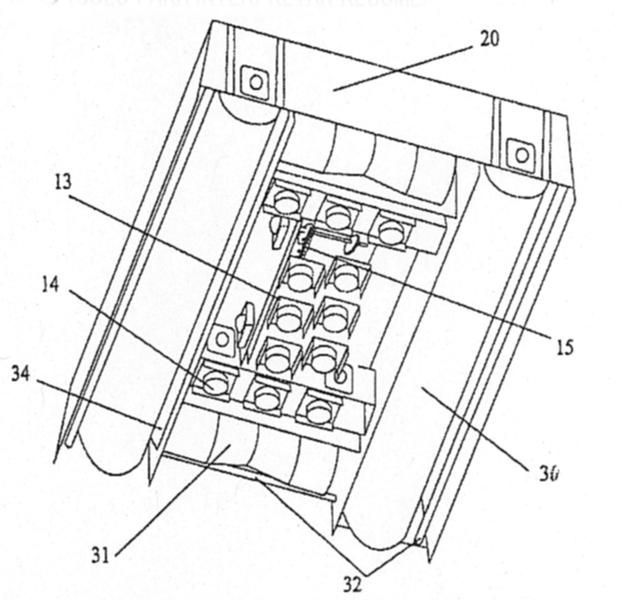
ROBOR TREPADOR LIMPIADOR DESLIZANTE POR CADENA DE ELECTROIMANES.
(16/06/2008). Ver ilustración. Solicitante/s: ASCEND RMM, S.L. Inventor/es: PEREZ MOURE,MANUEL.
Robot trepador limpiador deslizante por cadena de electroimanes, para trabajos de limpieza sobre superficies metálicas (como torres eólicas, cascos de barcos, chimeneas metálicas y cualquier superficie plana metálica) en lugares de difícil acceso y peligrosos para las personas, basado (dibujo de vista inferior con chasis -20-) en dos conjuntos de orugas dispuestos horizontal y verticalmente que incorporan unos electroimanes alternativamente montados sobre una cadenas , empleando soportes ; mediante las cadenas el robot se desplaza a la vez que asegura su adherencia, y se activan según el movimiento que queramos realizar. Permite desplazarnos verticalmente hasta 100m y de izquierda a derecha en un rango 15 metros, efectuando la limpieza empleando unos rociadores de líquidos disolventes y unos rodillos de limpieza , que son secados y limpiados a su vez por unos bloques limpiadores , recogiéndose los residuos por medio de unos sticks accionados por unos electroimanes.
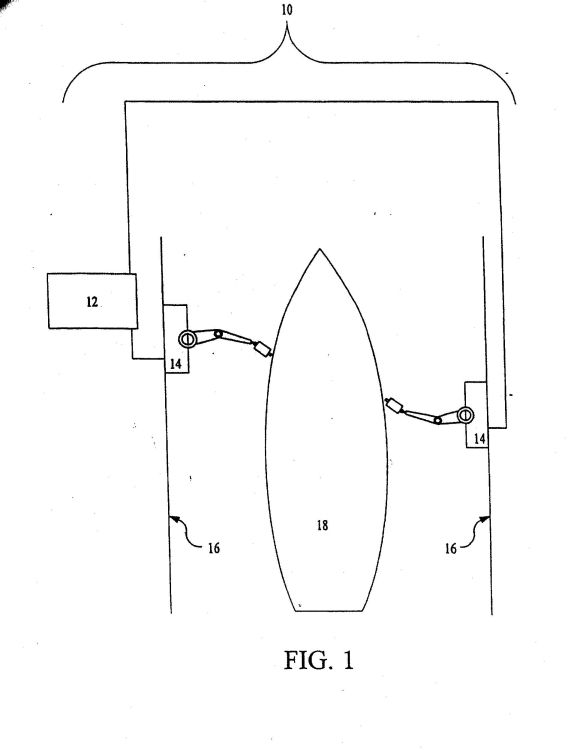
PROCEDIMIENTO Y APARATO CONTROLADO POR ORDENADOR PARA ALISAR FORMAS Y PINTAR SUPERFICIES DE EMBARCACIONES MARINAS.
(01/12/2007). Ver ilustración. Solicitante/s: VISIONS EAST, INC. Inventor/es: MORTON,JOHN STEPHEN.
Un método realizado por ordenador para el carenado y pintado del casco y/o superestructura de un buque marino, utilizando un sistema robotizado que incluye una serie de robots montados en medios móviles y que tienen brazos provistos de varias conexiones, que pueden moverse alrededor de varios ejes de control, comprendiendo las fases de:#A- Colocar dicho buque marino a fin de que los mencionados robots tengan acceso a los citados casco y superestructura;#B- Analizar las imperfecciones de dichos casco y superestructura del buque;#C- Aplicar un compuesto de carenado a las citadas imperfecciones;#D- Lijado de dicho compuesto de carenado alineándolo con el citado casco y/o superestructura;#E- Eliminar cualquier polvo de compuesto generado en el proceso de lijado; y#F- Pintar dicho casco y/o superestructura;.
(01/03/2002). Solicitante/s: SEEMANN, HENRY. Inventor/es: SEEMANN, HENRY.
UN ROBOT PARA REALIZAR UNA OPERACION DE TRABAJO EN UNA SUPERFICIE. EL ROBOT COMPRENDE UNA ESTRUCTURA QUE SOPORTA UN PAR DE GUIAS PARALELAS . UNA CADENA DE ENLACE SIN FIN ESTA MONTADA PARA DIRIGIR CADA GUIA Y CADA CADENA ES ACCIONADA POR UN MOTOR INDEPENDIENTE MONTADO EN LA ESTRUCTURA. CADA GUIA ESTA PROVISTA CON AL MENOS DOS RECESOS CON CADA RECESO TENIENDO UN LADO ABIERTO ENFRENTE DE LA CADENA CORRESPONDIENTE. UNA SERIE DE VENTOSAS ESTAN MONTADAS EN CADA CADENA Y ADAPTADAS PARA ENGANCHARSE A LA SUPERFICIE A RECORRER. UNA SERIE DE PUERTOS CONECTAN LOS RECESOS DE CADA GUIA Y LOS GRUPOS DE VENTOSAS EN CADA CADENA. UNA FUENTE DE VACIO ESTA CONECTADA A LOS RECESOS Y ACTUA A TRAVES DE LOS PUERTOS PARA QUE LAS VENTOSAS CORRESPONDIENTES PERMITAN QUE LAS VENTOSAS SE AGARREN A LA SUPERFICIE. EL ROBOT SE EMPLEA CON UN SISTEMA DE RASTREO LASER EN LA INSPECCION NO DESTRUCTIVA DE UN AVION.
MECANISMO DE MANUTENCION APTO PARA DESPLAZARSE SOBRE UNA PARED DE INCLINACION ARBITRARIA.
(01/07/1987). Solicitante/s: SOCIETE DE TRAVAUX EN MILIEU IONISANT.
MECANISMO DE MANUTENCION PARA DESPLAZARSE SOBRE UNA PARED DE INCLINACION ARBITRARIA. COMPRENDE: DOS CAMARAS QUE PRESENTAN UN LADO ABIERTO APTO PARA ENTRAR EN CONTACTO CON LA SUPERFICIE ; MEDIOS PARA CREAR UNA DEPRESION EN EL INTERIOR DE UNA PRIMERA DE LAS CAMARAS ; Y MEDIOS PARA CREAR UNA SOBREPRESION EN LA CAMARA RESTANTE ; ESTANDO DELIMITADO EL LADO ABIERTO DE CADA UNA DE LAS CAMARAS POR UNA JUNTA DE ESTANQUEIDAD , APTA PARA ENTRAR EN CONTACTO ESTANCO CON LA SUPERFICIE. TIENE APLICACION PARA LA LIMPIEZA DE CASCOS DE BUQUES O INTERIORES DE CISTERNAS.
APARATO PARA LIMPIAR Y CONSERVAR SUPERFICIES VERTICALES O INCLINADAS, EN ESPECIAL PAREDES LATERALES DE BORDA DE BARCOS.
(16/05/1980) Aparato para limpiar y conservar superficies verticales o inclinadas, en especial paredes laterales de borda de barcos, con un bastidor de rodadura que puede ser desplazado junto al borde superior del dique a lo largo de un carril, con un brazo en voladizo articulado al bastidor de rodadura, susceptible de bascular alrededor de un eje vertical, junto al cual está articulado un mástil susceptible de bascular alrededor de un eje horizontal y de un eje vertical, que soporta el dispositivo de trabajo, caracterizado por un recipiente de alojamiento de agua fijado al bastidor desplazable, el cual tiene, junto al lado asociado con la pared vertical del dique, en la zona superior un orificio para entrada de agua que se extiende casi por toda la longitud del recipiente, junto a la pared del dique, frente…
MAQUINA CEPILLADORA SUBMARINA.
(01/09/1978). Solicitante/s: CHRISTENSEN ENGINEERING A/S.
Máquina cepilladora submarina, del tipo que comprende un bastidor o similar adecuado para el montaje giratorio de cepillos discoidales con medios de accionamiento separados para el giro de dichos cepillos en el que se disponen uno o más pares de cepillos yuxtapuestos que giran opuestamente, dispuestos de manera que los ejes de giro de los cepillos de cada uno de dichos pares forman entre sí un pequeño ángulo fijo que diverge hacia el exterior con relación a la normal a la superficie de trabajo, de modo que los cepillos por las porciones opuestas extremas de su periferia se apoyan contra la superficie de trabajo más fuertemente que por sus porciones periféricas contiguas enfrentadas.
PERFECCIONAMIENTOS EN LOS APARATOS DE LIMPIADO DE SUPERFICIES SUMERGIDAS.
(01/12/1976). Solicitante/s: PHOCEENNE SOUS MARINE-P. S. M.
Resumen no disponible.
UN VEHICULO SOBRE ORUGAS PERFECCIONADO.
(01/06/1976). Solicitante/s: UNIVERSAL CRAWLER COMPANY LIMITED.
Resumen no disponible.
INSTALACION PARA LA LIMPIEZA DE LA SUPERFICIE SUMERGIDA DE CASCOS DE BUQUES Y EMPLEOS EQUIVALENTES.
(01/01/1976). Solicitante/s: ROMANO, BUONAPROLE Y LODI,G.,F. Y F.
Resumen no disponible.
DISPOSITIVO DESTINADO PARTICULARMENTE PARA TRABAJOS SOBRE CASCOS DE NAVIOS.
(01/01/1976). Solicitante/s: SVENSKA ALUCROM AB.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}