CIP-2021 : G01S 11/12 : que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP-2021 › G › G01 › G01S › G01S 11/00 › G01S 11/12[1] › que utilizan ondas electromagnéticas que no sean ondas de radio.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00).
G01S 11/12 · que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP2021: Invenciones publicadas en esta sección.
(02/10/2019) Procedimiento de determinación de la postura de un objeto, preferentemente de un dispositivo médico, comprendiendo el procedimiento las siguientes etapas:
a) proporcionar un objeto , preferentemente un dispositivo médico, que comprende al menos un elemento de identificación visual (4a, 4b, 4c) y un sensor de orientación para determinar una orientación absoluta y/o velocidad angular del objeto;
b) proporcionar al menos dos cámaras (7a, 7b) adaptadas para rastrear visualmente el al menos un elemento de identificación visual, cada cámara tiene un campo de visión y permanece estacionaria durante el procedimiento, las cámaras definen un sistema de coordenadas de cámara; c) adquirir…
Dron Perfilador de corrientes fluviales.
(24/06/2019). Solicitante/s: UNIVERSIDAD DE VALLADOLID. Inventor/es: CABEZUDO TEJEDA,Rodrigo.
Dron perfilador de corrientes fluviales.
Consiste en el desarrollo de una herramienta capaz de situar diferentes sensores en zonas de difícil acceso dentro de un río, reduciendo tiempos de trabajo, los costes de operarios e instrumentación y reduciendo riesgos laborales en la medición de parámetros físicos - químicos o batimetrías.
Posee propulsión autónoma y libertad de movimiento sobre el plano de la lámina superficial de agua de un río, permite poner un sensor en cualquier punto de la superficie de la anchura del río, sin necesidad de mojarse o introducirse dentro del mismo.
Las partes principales de las que se compone son la emisora de control remoto y el dron propiamente dicho que comprende un bastidor de aluminio al que se anclan el resto de partes. Las partes estructurales son: flotadores desmontables, flap de dirección y caja estanca que albergará la electrónica. El resto es el sistema de propulsión y sensores.
PDF original: ES-2717718_A1.pdf
Procedimiento, sistema y programa informático para determinar distancias y posiciones.
(30/08/2017) Un procedimiento para determinar una distancia entre al menos un primer dispositivo (10, 10a, 10b, 10-1 a 10-8) de posicionamiento, FPD, y un segundo dispositivo (20, 20a, 20b, 20-1 a 20 -4) de posicionamiento, SPD, comprendiendo el procedimiento:
en el FPD, difundir una pluralidad de señales de posicionamiento, teniendo cada señal de posicionamiento una potencia de difusión diferente predeterminada;
en el FPD, difundir una pluralidad de señales de datos de indicación de distancia, conteniendo cada señal de datos de indicación de distancia datos de indicación de distancia predeterminados asociados con un intervalo (200-1 a 200-5) de distancia de una señal de…
Procedimiento para la determinación de la distancia de un objeto que emite una huella infrarroja.
(14/09/2016). Solicitante/s: Airbus DS Electronics and Border Security GmbH. Inventor/es: BARTH,JOCHEN.
Procedimiento para la determinación de la distancia de un objeto que emite una huella infrarroja, registrándose la distribución de intensidad espectral de la radiación emitida por el objeto en una gama de longitudes de onda preestablecida, caracterizado por que
- en la zona de una estructura de absorción de la atmósfera se mide un espectro de distribución de intensidad del objeto,
- en el espectro de distribución de intensidad medido se determina un punto de inclinación extrema en un flanco causado por la estructura de absorción atmosférica de un aumento o descenso de intensidad,
- determinándose mediante comparación de los datos de transmisión conocidos de la atmósfera el recorrido de la radiación a través de la atmósfera y, por consiguiente, la distancia entre el detector y el objeto.
PDF original: ES-2606252_T3.pdf
Método para estimar la velocidad rotacional de una herramienta montada sobre un husillo rotativo de una máquina herramienta y tal máquina herramienta.
(25/05/2016) Método para estimar la velocidad rotacional de una herramienta montada en un husillo rotativo de una máquina herramienta usando un sistema visual que adquiere imágenes de la herramienta mientras esta está girando; comprendiendo el método comprende las etapas de:
- hacer rotar el husillo a un valor de velocidad nominal (VN);
- posicionar la herramienta en el campo visual del sistema visual ; y
- obtener, por medio de dicho sistema visual , parejas representativas de imágenes de la herramienta ;
estando el método caracterizado por que incluye las siguientes etapas:
- definir un primer intervalo (ICN) de valores de velocidad preseleccionados (VC) de velocidad rotacional que está sustancialmente centrado en el valor de velocidad nominal (VN) de velocidad rotacional…
Dispositivo de ayuda que permite a un conductor de un vehículo verificar una zona de estacionamiento abandonada.
(30/11/2015) Dispositivo de ayuda (D) para un conductor de un vehículo (V), que comprende medios de adquisición (MAi) de datos de imagen representativos de al menos una parte de una zona de estacionamiento (ZS) del citado vehículo, medios de almacenamiento (MS) dispuestos para almacenar los datos de imagen, medios de control (MC) y primeros medios de tratamiento (MT1), estando dispuestos los citados medios de control (MC) para activar los citados primeros medios de tratamiento y producir los citados datos de imagen representativos de al menos la citada parte de la zona de estacionamiento (ZS), en función de datos adquiridos por los…
Sistema para localización con precisión de un objetivo en tierra mediante una plataforma de vuelo y método de operación asociado.
(07/08/2013) Sistema de localización de objetivo configurado para determinar la posición de un objetivo en la tierra pormedio de una aeronave sin un dispositivo de telémetro láser, dicho sistema comprende una aeronave , porlo menos una cámara montada sobre dicha aeronave y dirigida de acuerdo con su propio eje de rastreo (A),medios de movimiento configurados para regular la posición espacial de dicha cámara con respecto a dichaaeronave de tal manera que dicho eje de rastreo (A) permanece dirigido sobre el objetivo durante el vuelo dela aeronave , medios de control para pilotear temporalmente la aeronave a lo largo de un segmento devuelo rectilíneo (TR) por encima del área…
Procedimiento y dispositivo para ampliar una zona de visibilidad.
(03/07/2013) Procedimiento para ampliar una zona de visibilidad obtenida por medio de una cámara montada en un vehículo,que comprende:
- una etapa de creación de una imagen virtual elemental (I2v) en la cual un conjunto de píxeles de laimagen virtual elemental es puesto en correspondencia con un conjunto de píxeles de una imagen real (I1R)captada por la cámara, considerando que el conjunto de píxeles de la imagen real reproduce una superficieplana del mundo real;
- una etapa de caracterización de la imagen virtual elemental (I2v) en la cual se genera un conjunto depuntos de interés de la imagen virtual elemental (I2v);
- una etapa de construcción de una imagen virtual acumulativa (I3v) en la cual al menos una parte de laimagen virtual elemental…
Dispositivo de estimación de distancia.
(25/06/2013) Un dispositivo de estimación de distancia para ser utilizado en un sistema anticolisión en unaplataforma aérea , comprendiendo dicho sistema anticolisión una unidad de determinación de latrayectoria y un filtro de seguimiento del blanco para seguir un blanco para recuperar un rumbo quecomprende el azimut y la elevación hasta el blanco en base a la salida de al menos un sensor pasivo de cámara o de cámara IR y al calcular una estimación de distancia y estimaciones de distancias deincertidumbre hasta el blanco en base a dichos datos de rumbo y de posición de la unidad dedeterminación de la trayectoria, en el que dicho dispositivo de estimación de distancia comprendeuna unidad de control dispuesta para indicar a un sistema de control de…
Un sistema de seguimiento de objetivos y un procedimiento para el seguimiento de un objetivo.
(14/06/2013) Un sistema de seguimiento de objetivos que comprende
- un medio de seguimiento , dispuesto para realizar el seguimiento basado en un modelo de un objetivo ,en base a las mediciones recibidas desde un sensor pasivo ,
- un medio de detección , dispuesto para detectar cuándo un objetivo realiza una maniobra;
- un medio de conmutación de salidas , dispuesto para recibir avisos de detección de maniobras desde losmedios de detección y para conmutar entre el primer y segundo modos de salida en respuesta a los avisosde detección recibidos desde dicho medio de detección ,
caracterizado porque el medio de conmutación de salidas está dispuesto para recibir continuamente estimacionesdel modelo…
Procedimiento y disposición para la estimación de al menos un parámetro de un intruso.
(09/05/2013) Procedimiento para estimar, a partir de un vehículo , parámetros (→rmín ;→rmáx ;→mín v ;→máx v ) de un intruso,
que comprende las etapas de:
- generar cuadros consecutivos de datos de imagen en diferentes momentos de dicho intruso por medio de al menos un sensor pasivo ;
- determinar una dirección desde el vehículo hacia el intruso sobre la base de los cuadrosconsecutivos generados de datos de imagen;
- estimar de un período de tiempo (TTG) restante hasta una colisión potencial entre el vehículo y elintruso basada en el procesamiento de datos de imagen asociados con al menos dos imágenesgeneradas…
Utilización de un sensor de imágenes y de un filtro de seguimiento de tiempo restante para evitar colisiones en vuelo.
(11/04/2013) Un sistema para evitar colisiones para decidir si se debe realizar una maniobra de evitación autónoma con elfin de evitar una colisión en vuelo entre un vehículo aéreo anfitrión equipado con el sistema y un vehículoaéreo intruso, comprendiendo el citado sistema :
- al menos un sensor electro - óptico [EO] dispuesto para capturar imágenes consecutivas del citadovehículo intruso, el vehículo que se manifiesta como un punto de objetivo en las citadas imágenes,
- un medio de tratamiento de imagen dispuesto para la estimar al menos el ángulo de acimut [φ] y de elevación [θ] desde el vehículo anfitrión al vehículo intruso en base a la posición en 2D del punto deobjetivo en la citadas imágenes, que se caracteriza porque el citado medio de tratamiento de imagen…
Sistema de detección de objetos para vehículo.
(08/08/2012) Un sistema de formación de imágenes para un vehículo que comprende:
un sensor matricial de formación de imágenes que comprende una pluralidad de píxeles fotosensores, estando colocado dicho sensor matricial de formación de imágenes en el vehículo y que tiene un campo de visión en el exterior del vehículo, siendo operable dicho sensor matricial de formación de imágenes para captar un conjunto de datos de imagen representativo de una escena que sucede en el exterior del vehículo y en el campo de visión exterior de dicho sensor matricial de formación de imágenes; y
un procesador para procesar dicho conjunto capturado de datos de imagen, incluyendo dicho procesador un microprocesador que comprende un algoritmo de detección de bordes, caracterizado porque dicho procesador selecciona…
Procedimiento de determinación de una distancia de visibilidad para un conductor de vehículo.
(18/05/2012) Procedimiento de determinación de una distancia de visibilidad (D) para un conductor de un vehículo en presencia de un elemento (BR) que perturba la visibilidad del conductor, que comprende las siguientes etapas:
- registro de al menos una imagen (I1, I2) de un campo del espacio situado delante del vehículo, definiéndose dicha imagen mediante un conjunto de píxeles (PIX) y de líneas de exploración (BL),
- separación de dicha imagen (I1, I2) en dos partes por una primera línea que pasa por un punto predeterminado (PD),
- determinación de la luminosidad de los píxeles (PIX) de dicha primera línea , dando como resultado una curva de luminosidad (LUX),
caracterizado…
Sistema para simular la firma de una amenaza de misil.
(09/05/2012) Sistema para simular la firma de una amenaza de misil, que comprende:
un dispositivo para ajustar una ventana de adquisición de un dispositivo de formación de imágenespara la adaptación a un objetivo visualizado a una distancia desconocida en respuesta a una entrada de usuario;un dispositivo para determinar un ángulo subtendido por la mayor dimensión del objetivo visualizado apartir de la ventana de adquisición;
un dispositivo para estimar la distancia del objetivo a partir de una clase de tamaño de objetivoseleccionada y el ángulo subtendido por la mayor dimensión del objetivo visualizado a partir de la ventana deadquisición; y caracterizado porque presenta
un dispositivo para transmitir al objetivo visualizado energía electroóptica que presenta unas características que emulan una firma de amenaza de misil según la distancia…
Procedimiento, programa de ordenador y dispositivo para determinar el riesgo de una colisión en el aire.
(28/03/2012) Un procedimiento para determinar la probabilidad de que un vehículo colisione con un objeto que comprende la etapa de:
- detectar el objeto, al capturar una imagen por medio de un sensor óptico montado en el vehículo y registrar el objeto en la imagen,
- determinar a partir de una serie de imágenes capturadas por el sensor óptico la posición y la velocidad relativas del objeto detectado , y de ese modo una posición, una dirección y una velocidad relativas al vehículo por medio de una unidad de seguimiento de objetivos dispuesta en el vehículo ,
caracterizado por las etapas adicionales de:
- determinar un proceso estocástico (SP, s…
DISPOSITIVO DE MEDICIÓN DE LA DISTANCIA DE VISIBILIDAD.
(01/12/2011) Dispositivo de determinación de la distancia de visibilidad en un paisaje, que comprende: - una cámara para captar una imagen de dicho paisaje para el que debe determinarse la distancia de visibilidad; - medios para memorizar dicha imagen; estando caracterizado dicho dispositivo porque comprende además: - medios de tratamiento de la imagen para detectar si un píxel de la imagen presenta un contraste superior a un valor predeterminado con respecto a al menos algunos de los píxeles adyacentes; medios para aplicar sucesivamente a los píxeles de la imagen dicho tratamiento de detección de contraste, desde el píxel correspondiente a la mayor distancia entre un punto del paisaje y la cámara, y hasta que se detecte que un píxel, denominado primer píxel, presenta un contraste…
METODO Y SISTEMA PARA ASISTIR AL CONDUCTOR DE UN VEHICULO AUTOMOVIL EN UNA MANIOBRA DE CAMBIO DE CARRIL.
(01/06/2006) Método para asistir al conductor de un automóvil en una maniobra de cambio de carril, mediante la señalización del estado de emergencia generado por el acercamiento de otro automóvil en el mismo carril sobre el que se está desplazando el primer automóvil, incluyendo dicho método: - disponer unos medios de detección optoelectrónicos pasivos digitales , del tipo CMOS, sobre el espejo retrovisor externo del primer automóvil, - tratar las señales emitidas por dichos medios de detección acerca de la posición del automóvil (A) con respecto al lado (M) más cercano al carril (L1) sobre el que se está desplazando, - tratar las señales emitidas por dichos medios de detección para detectar cuándo un vehículo (D) que le está siguiendo se está acercando sobre el carril…
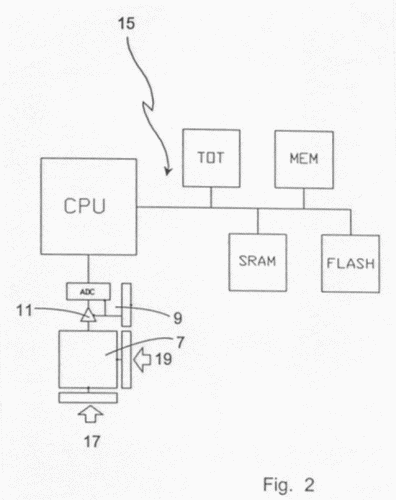
DISPOSITIVO DE DETECCION DE PRESENCIA DE OBJETOS.
(16/03/2002). Ver ilustración. Solicitante/s: FICO MIRRORS S.A.. Inventor/es: SARTORI, ALVISE, TECCHIOLLI, GIAMPIETRO, TARRAGO PUJOL, JOSE MARIA, DAURA LUNA, FRANCESC, BANDE MARTINEZ, DANIEL, CRESPO,BRUNO.
Dispositivo de detección de presencia de objetos, del tipo que van montados en un vehículo automóvil, que presenta por lo menos un ángulo muerto, donde el dispositivo de detección es apto para detectar un objeto situado en el ángulo muerto y comprende: un receptor apto para detectar unas ondas electromagnéticas, con un dispositivo focalizador, y un fotosensor que transforma dichas ondas electromagnéticas recibidas en unas señales eléctricas, un circuito electrónico que transforma las señales eléctricas en unas señales digitalizadas, un circuito lógico que analiza las señales digitalizadas para analizar la presencia de objetos en el ángulo muerto con un movimiento relativo respecto de dicho vehículo, y que emite unas señales de salida variables en función del resultado del análisis, [d] unos elementos indicadores, activados mediante las señales de salida, aptos para ser percibidos por el conductor.
{kind=link}