CIP-2021 : G01S 5/02 : usando ondas de radio (G01S 19/00 tiene prioridad).
CIP-2021 › G › G01 › G01S › G01S 5/00 › G01S 5/02[1] › usando ondas de radio (G01S 19/00 tiene prioridad).
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
G01S 5/02 · usando ondas de radio (G01S 19/00 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
SINTONIZACION SINCRONICA AUTOMATICA DE RECEPTORES DE BANDA ESTRECHA DE UN SISTEMA DE POSICIONAMIENTO INALAMBRICO PARA SEGUIMIENTO DE CANAL DE VOZ/TRAFICO.
(10/12/2009). Ver ilustración. Solicitante/s: TRUEPOSITION, INC.. Inventor/es: ANDERSON, ROBERT, J..
Un método para utilizar en un sistema de localización inalámbrica para localizar un transmisor inalámbrico utilizando múltiples receptores de banda estrecha, que incluyen:
(a) Provocar que dicha multitud de receptores sigan un modo de funcionamiento de sintonización secuencial automática en donde los receptores secuencialmente y al unísono sintonicen una multitud de canales RF predefinidos y reciban las transmisiones de señal en dichos canales; y
(b) Realicen el procedimiento de localización en las señales recibidas durante el modo de funcionamiento de sintonización secuencial automática; Con la característica de que el modo de sintonización secuencial comprende el uso de un patrón de sintonización circular donde uno o más periodos libres son intercalados con una multitud de series de números de canal predefinidos, dichos periodos libres están disponibles para la nueva temporización de dichos canales.
GIROBRUJULA POR INTERFEROMETRIA GPS INTERMITENTE.
(01/07/2006) Sistema basado en interferometría GPS (Sistema de determinación de la posición global), o en cualquier constelación de satélites similar, para medir la orientación de un vehículo , comprendiendo dicho sistema: un sensor giroscópico de tres ejes; un sensor interferómetrico con múltiples antenas , con, al menos, tres antenas, que mida la fase diferencial de las ondas electromagnéticas generadas por satélites fuente ; una parte de lógica para tratar los datos que provengan de dicho sensor interferométrico y de dicho sensor giroscópico ; comprendiendo dicha parte de lógica, a su vez, una parte de dinámica orbital …
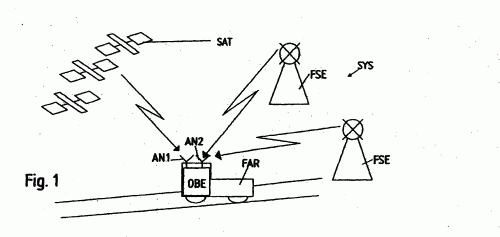
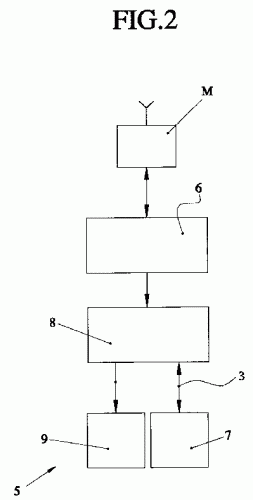
PROCEDIMIENTO Y SISTEMA PARA LA DETERMINACION DE LA POSICION.
(16/11/2005). Ver ilustración. Solicitante/s: SIEMENS AG ISTERREICH. Inventor/es: RENNER, ALEXANDER, SCHILD, RAOUL.
Procedimiento para la determinación de la posición de un aparato móvil (OBE), que presenta al menos una instalación de recepción de señales de radio (GSM), por medio de la cual se pueden recibir diferentes canales de radio (k1 k6), que son emitidos desde instalaciones de emisión fijas (FSE, SE1 SE6) a través de una comunicación desde un punto hacia puntos múltiples, en el que a) con la ayuda de los canales de radio (k1- k6) recibidos desde la instalación de recepción (GSM) se calcula al menos un patrón de canal, b) el al menos un patrón de canal se compara con patrones de referencia predeterminados, y c) a través de la evaluación de esta comparación se deduce la posición momentánea de la instalación de recepción de señales de radio (GSM), caracterizado porque se llevan a cabo las etapas a) c) en el aparato móvil (OBE).
SISTEMA DE ADVERTENCIA Y DETECCION DE DISPOSITIVOS DE CONTROL DE VELOCIDAD.
(16/10/2005) Un sistema de advertencia y detección de dispositivos de control de velocidad para un vehículo, que comprende: un medio de procesamiento de señales para recibir señales y para procesar las señales recibidas a fin de generar datos de ubicación del vehículo que definen la ubicación del vehículo; y un medio de almacenamiento configurado para almacenar datos de ubicación que definen una ubicación respectiva para cada uno de una pluralidad de dispositivos de control de velocidad; caracterizado porque: el medio de almacenamiento está adicionalmente configurado para almacenar datos de orientación de dispositivos de control de velocidad, que definen la respectiva dirección de operación de cada uno de los dispositivos…
SISTEMA PARA LA OPTIMIZACION DE LA TRAYECTORIA EN VEHICULOS.
(16/05/2005) Sistema para la optimización de la trayectoria en vehículos. Está previsto para conseguir optimizar, ya sea en tiempo real o en post-proceso, la trayectoria de un móvil o vehículo de competición en circuitos cerrados o abiertos, basándose en la utilización de un subsistema de posicionamiento que utiliza un sistema GPS diferencial de fase que proporciona de manera precisa y fiable el posicionamiento del móvil o vehículo , y determina la trayectoria de éste en tiempo real post-proceso, con precisiones centimétricas. Además, incluye un subsistema telemétrico para la utilización de adquisición de datos telemétricos , basándose en la disposición de una serie de sensores y un colector de datos…
PROCEDIMIENTO DE LOCALIZACION DE TERMINALES MOVILES GSM.
(16/04/2003). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: AGUSTI COMES,RAMON, SALLENT ROIG,ORIOL.
"Procedimiento de localización de terminales móviles GSM". Consiste en adquirir desde el terminal GSM y en tiempo real información disponible en el sistema GSM, empaquetarla adecuadamente para enviarla a un centro servidor en el que se mantiene información del sistema GSM previamente registrada y procesada, y finalmente, mediante la aplicación de varios algoritmos estimar la posición geográfica del terminal GSM en cuestión. El algoritmo .a aplicar depende de la información que se proporcione así como del número de muestras de información de que se disponga. Se ha previsto que el procedimiento puede desencadenarse desde el propio terminal móvil o bajo petición del centro servidor . Igualmente se ha previsto que el procedimiento pueda aplicarse sobre una o varias muestras de información recogida por el terminal móvil GSM.
(16/03/2003). Solicitante/s: BAIL GMBH. Inventor/es: BAIL, GUNTHER, DR.
Sistema para el mando de un vehículo autopropulsado, caracterizado por los siguientes pasos: a) en la memoria de datos del vehículo se introducen los datos de posición de un trayecto seleccionado desde un lugar inicial a uno de destino; b) el vehículo recorre después automáticamente el trayecto predefinido, en el que b1) en un punto de partida recibe de un sistema de posicionamiento, la correspondiente señal actual de posición, compara esta con la posición almacenada del lugar inicial, y cuando los datos de posición no coinciden calcula a partir de estos la dirección y distancia al lugar inicial, y recorre este trayecto, y b2) acto seguido recibe datos sucesivos actuales de posición, y calcula para cada uno, la dirección y distancia a la siguiente posición almacenada, y recorre el trayecto correspondiente.
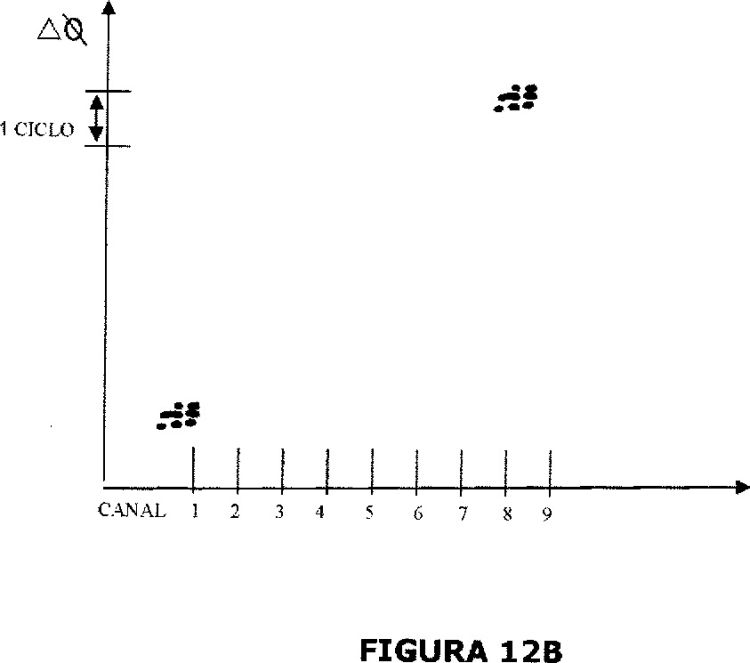
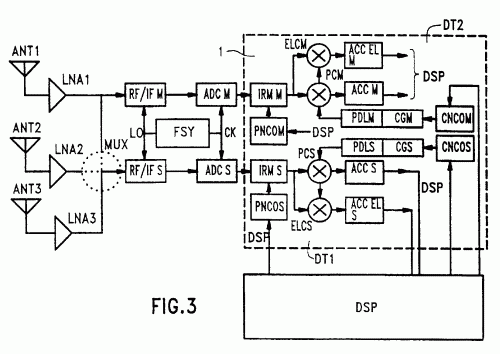
DISPOSITIVO DE RECEPCION PARA SISTEMA DE NAVEGACION, ESPECIALMENTE POR SATELITE.
(01/03/2002). Ver ilustración. Solicitante/s: AGENCE SPATIALE EUROPEENNE. Inventor/es: SILVESTRIN, PIERLUIGI, DALY, PETER, WALSH,DAVID, AARDOOM,ERIC.
LA INVENCION SE REFIERE A UN DISPOSITIVO DE RECEPCION PARA SISTEMA DE NAVEGACION QUE COMPRENDE AL MENOS DOS ANTENAS (ANT{SUB,1-3}), UNA DE LAS CUALES ES UNA ANTENA (ANT{SUB,1}) LLAMADA DE REFERENCIA. UN MULTIPLEXOR (MUX) MULTIPLEXA LAS SEÑALES DE LAS ANTENAS (ANT{SUB,1-3}) Y UN PRIMER DISPOSITIVO DE TRATAMIENTO (DT1) SITUADO MAS ABAJO DEL DISPOSITIVO (MUX) RESTITUYE AL MENOS UN PARAMETRO DE NAVEGACION A PARTIR DE LAS SEÑALES PROCEDENTES DEL MULTIPLEXOR (MUX). EL DISPOSITIVO LLEVA UN SEGUNDO DISPOSITIVO DE TRATAMIENTO (DT2) QUE TIENE UNA ENTRADA QUE RECIBE DE MANERA CONTINUA LAS SEÑALES DE LA ANTENA DE REFERENCIA (ANT{SUB,1}) PARA RESTITUIR AL MENOS UNA SEÑAL DE REFERENCIA REPRESENTATIVA DE UN PARAMETRO DE LA POSICION DE LA ANTENA DE REFERENCIA (ANT{SUB,1}). UN MEDIO DE TRATAMIENTO (DSP) TRATA LAS SEÑALES PROCEDENTES DEL MULTIPLEXOR (MUX) TENIENDO EN CUENTA AL MENOS UNA LLAMADA DE REFERENCIA.
LOCALIZADOR DE TERMINALES MOVILES ACTIVOS EN AREAS ESPECIFICAS.
(01/02/2002). Solicitante/s: ISASI DE VICENTE,FERNANDO G. GONZALEZ CASTAO,FRANCISCO J. POUSADA CARBALLO,JOSE MARIA. Inventor/es: POUSADA CARBALLO,JOSE MARIA, ISASI DE VICENTE,FERNANDO G., GONZALEZ CASTAÑO,FCO. JAVIER.
Localizador de terminales móviles activos en áreas especificas. El objetivo del sistema es determinar la localización de los terminales móviles que estén activos en su vecindad (edificio, aeronave,...). Para ello, el sistema procesará las señales captadas por un sistema de antenas para establecer la localización de los terminales móviles (generadores de dichas señales) con una precisión determinada. Se analizarán las señales del enlace ascendente, móvil-estación base. Básicamente las señales de autoidentificación y demás mensajes de señalización, y en general cualquier señal generada por un terminal móvil. Se establecen dos modos de funcionamiento: un sistema pasivo, que localizará los móviles si éstos establecen comunicación con la estación base, y un sistema activo, que mediante interferencia, obligará a los móviles a comunicarse con una estación base, y por tanto a emitir las señales que analizará el sistema.
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LOS DATOS DE MARCHA DE UN VEHICULO SOBRE RAILES.
(16/04/1999). Solicitante/s: MANNESMANN AKTIENGESELLSCHAFT. Inventor/es: RASTI, MAHMUD KESCHWARI.
EN UN PROCEDIMIENTO PARA DETERMINAR LOS DATOS DE MARCHA DE UN VEHICULO SOBRE RAILES COMO POR EJEMPLO, VELOCIDAD, TRAMO DE FRENADA, VALOR DE DESLIZAMIENTO Y/O FUERZA CENTRIFUGA SE TIENE EN CUENTA UNA MARCHA DE RECORRIDO PRECALCULADA. PARA CREAR UN CONTROL A DISTANCIA AUTOMATICO SE PROPONE, QUE A PARTIR DE UNA O VARIAS SEÑALES DE SATELITES COMUNICADOS POR RADIOS SE ENVIEN A UN RECEPTOR LOCALIZADO EN VEHICULO SOBRE RAILES Y QUE ESTAS SEÑALES SE SUMINISTREN Y TRATEN EN UN MICROCOMPUTADOR PARA EL CALCULO DE VALORES DE LONGITUDES, TIEMPOS Y FUERZAS CENTRIFUGAS.
DISPOSICION PARA PROPORCIONAR COMUNICACIONES Y CONTROL POSICIONAL EN UNA INSTALACION DE GUIA.
(16/03/1998). Ver ilustración. Solicitante/s: TELIA AB. Inventor/es: WICHTEL, ERIK.
DISPOSICION PARA PROPORCIONAR COMUNICACIONES Y CONTROL POSICIONAL EN UNA INSTALACION DE GUIA PARA EL GUIADO DE UNIDADES MOVILES, QUE SE INSTALA EN SISTEMAS DE VIAS. EL CONTROL POSICIONAL SE REALIZA CON GRAN PRECISION. UNA UNIDAD MOVIL Y PUESTOS DE BASE COLOCADOS A LO LARGO DEL SISTEMA DE VIAS CONSTITUYEN EQUIPOS PRIMERO Y SEGUNDO PARA LAS COMUNICACIONES Y CONTROL POSICIONAL. EL ESTABLECIMIENTO DE LA COMUNICACION ENTRE LOS EQUIPOS PRIMERO Y SEGUNDO SE REALIZA A TRAVES DE UN SISTEMA DE RADIO MOVIL (DECT). SE ESTABLECE EL CONTROL POSICIONAL MEDIANTE UN EQUIPO DE CONTROL POSICIONAL INCLUIDO EN UNA RESPECTIVA UNIDAD MOVIL. CUANDO UNA UNIDAD MOVIL REBASA UN PUESTO DE BASE, SE ACTUALIZA EL EQUIPO DE CONTROL POSICIONAL DE LA UNIDAD MOVIL CON LA AYUDA DE UN EQUIPO DE CONTROL POSICIONAL DE REFERENCIA. ESTA ACTUALIZACION SE REALIZA A TRAVES DE DICHO SISTEMA DE RADIO MOVIL. ES DE APLICACION EN SISTEMAS DE VEHICULOS SIN CONDUCTOR.
SISTEMA CONTROLADOR DE AERONAVE PASIVO.
(01/03/1998). Solicitante/s: HUGHES AIRCRAFT COMPANY. Inventor/es: LYNCH, THOMAS J., FINKELSTEIN, MARC, GEESAMAN, MARTIN J.
SE DESCRIBE UN SISTEMA CONTROLADOR DE AERONAVE PASIVO QUE RECIBE SEÑALES TRANSMITIDAS POR UN SISTEMA INSTRUMENTAL DE ATERRIZAJE Y REFLEJADAS DESDE LA AERONAVE .EL DESPLAZAMIENTO DOPPLER EN LAS SEÑALES REFLEJADAS SE UTILIZA PARA CALCULAR LA POSICION O VELOCIDAD DE LA AERONAVE. UTILIZANDO LAS SEÑALES ILS 90 Y 150 HZ REFLEJADAS DESDE LA AERONAVE Y COMPARANDO SU MAGNITUD, SE PUEDE DETERMINAR LA ALTITUD Y POSICION LATERAL DE LA MISMA.
SISTEMA DE NAVEGACION Y SEGUIMIENTO.
(01/08/1993). Solicitante/s: LYNXVALE LTD. CAMBRIDGE RESEARCH AND INNOVATION LTD. CAMBRIDGE CAPITAL MANAGEMENT LTD. Inventor/es: DUFFET-SMITH, PETER, JAMES.
EL INVENTO SE REFIERE A UN SISTEMA DE NAVEGACION Y SEGUIMIENTO PARA CONTROLAR EL MOVIMIENTO DE UN OBJETO QUE LLEVA UNA DE LAS DOS ESTACIONES RECEPTORAS (D,E), ESTANDO SITUADA LA OTRA ESTACION RECEPTORA EN UNA POSICION CONOCIDA. LAS SEÑALES SON TRANSMITIDAS POR UNA SERIE DE TRANSMISION DE FUENTES DE TRANSMISION INDEPENDIENTES (A,B,C) EN NUMERO AL MENOS IGUAL AL DE DIMENSIONES CON LAS QUE VA A CONTROLARSE EL MOVIMIENTO. UNA CONEXION (F) PASA A REPRESENTACION DE LA SEÑAL O SEÑALES RECIBIDAS POR UNA DE LAS ESTACIONES (E) A LA OTRA ESTACION RECEPTORA (D) Y UNOS DISPOSITIVO (R,S,T,U) EN LA OTRA ESTACION RECEPTORA COMPARA LAS REPRESENTACIONES DE LA SEÑAL Y DETERMINA LA DIFERENCIA DE FASE O DEMORA TEMPORAL ENTRE LAS SEÑALES RECIBIDAS, OBTENIENDOSE ASI EL CAMBIO EN LA DIFERENCIA DE FASE O LA DEMORA TEMPORAL DE LAS SEÑALES AL MOVERSE EL OBJETO. ASI PUEDE DETERMINARSE EL MOVIMIENTO DEL OBJETO EN RELACION A LA FUENTE O FUENTES DE TRANSMISION Y, COMO CONSECUENCIA, SU POSICION.
SISTEMA DE RADIOGONIOMETRIA AUTOMATICO PARA LOCALIZAR EMISORAS DESCONOCIDAS DE VHF-UHF Y PARA GUIADO DE VEHICULOS DOTADOS DE EMISORAS DE VHF-UHF.
(01/06/1987). Solicitante/s: ELECTRONICA ENSA, S.A.
SISTEMA DE RADIOGONIOMETRIA AUTOMATICO. COMPRENDE CUATRO MODULOS BASICOS: DE ANTENAS , DE RECEPCION Y PROCESO , DE VISUALIZACION Y DE ALIMENTACION , DE TAL MANERA QUE EN EL MODULO COMPRENDER LA ANTENA PROPIAMENTE DICHA Y EL CORRESPONDIENTE CONMUTADOR , EN TANTO QUE EL DE RECEPCION Y PROCESO COMPRENDE UN BLOQUE RECEPTOR MAESTRO , UN BLOQUE RECEPTOR ESCLAVO , UN PROCESADOR DE RADIOFRECUENCIA Y UN PROCESADOR DIGITAL ; Y EL MODULO DE VISUALIZACION UN CONTROLADOR GRAFICO CON UN TUBO DE RAYOS CATODICOS Y UN TECLADO . TIENE UTILIDAD PARA EL GUIADO DE VEHICULOS DOTADOS DE EMISORES VHF/UHF.
SISTEMA DE NAVEGACION POR IMPULSOS SINCRONIZADOS.
(01/03/1985). Solicitante/s: MUÑOZ SAIZ,MANUEL.
SISTEMA DE NAVEGACION POR IMPULSOS SINCRONIZADOS. CONSISTE EN LA EMISION PERIODICA DE IMPULSOS O SEÑALES DE RADIO, A INTERVALOS DE TIEMPO PREFIJADOS, A PARTIR DE UNA EMISORA PRINCIPAL , CUYOS IMPULSOS O SEÑALES SON CAPTADOS POR UNA SERIE DE EMISORAS SECUNDARIAS DISTRIBUIDAS SOBRE LA SUPERFICIE O AREA QUE SE DESEA CUBRIR, Y QUE EMITEN AL MISMO TIEMPO Y DESPUES DE TRANSCURRIDO UN PERIODO DE TIEMPO PREFIJADO DESDE LA RECEPCION DE LA SEÑAL EMITIDA POR LA EMISORA PRINCIPAL , UNA SUCESION DE IMPULSOS O SEÑALES DE RADIO, TAMBIEN A INTERVALOS DE TIEMPO PREFIJADOS, QUE SON CAPTADOS POR EL AVION O NAVIO EN NAVEGACION CON DESFASES DE TIEMPO EN FUNCION DE SU DISTANCIA A LAS DISTINTAS EMISORAS SECUNDARIAS Y PERMITEN EL CALCULO DE LAS DISTANCIAS Y CALCULAR LA POSICION DE LA NAVE.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}