CIP-2021 : B25J 15/10 : con tres o más elementos en forma de dedos.
CIP-2021 › B › B25 › B25J › B25J 15/00 › B25J 15/10[2] › con tres o más elementos en forma de dedos.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 15/00 Cabezas de aprehensión.
B25J 15/10 · · con tres o más elementos en forma de dedos.
CIP2021: Invenciones publicadas en esta sección.
MÁQUINA DE EMPAQUETADO DE TUBOS CILÍNDRICOS Y PROCESO DEEMPAQUETADO.
(11/03/2020). Solicitante/s: AKYUREK KARDESLER TARIM URUNLERI MAKINALARI TASIMACILIK VE MADENCILIK SANAYI TICARET LIMITED SIRKETI, SUCURSAL EN ESPAÑA. Inventor/es: IMÍZCOZ GOÑI,Javier, MAREK PLEWA,Artur, URRIZA MACAYA,Francisco Javier.
Máquina de empaquetado de tubos cilíndricos y proceso de empaquetado que se lleva a efecto con dicha máquina, destinada a introducir un conjunto de tubos de cigarrillos dentro de las correspondientes cajas, que se compone de un carrusel de planta rectangular y esquinas redondeadas que en relación con sus dos lados mayores y en una disposición diagonal presenta sendas etapas de llenado (3 y 4); mientras que en relación con uno de sus lados menores presenta, al menos, un robot con una garra que posee dos unidades prensoras (2A y 2B); presentando cada unidad (2A o 2B) cuatros dedos prensores , móviles y con una sección transversal en escuadra, para poder coger una caja vacía entrando por su interior y presionando contra sus esquinas desde dentro hacia afuera; o una caja llena, presionando por el exterior desde fuera hacia adentro.
PDF original: ES-2747874_A1.pdf
Dispositivo mecánico para el porte, manejo y disposición de un cono explosivo, para la liberación de colgaduras de rocas en faenas mineras subterráneas.
(05/07/2019). Solicitante/s: Corporación Nacional Del Cobre De Chile. Inventor/es: PINILLA NARVÁEZ,Gaston, VICUÑA MARÍN,MARIO, ARANCIBIA VILLEGAS,Ernesto, GONZALEZ LOGUERCIO,GABRIEL.
Dispositivo mecánico para el porte, manejo y disposición de un cono explosivo, en la liberación de colgaduras en faenas mineras subterráneas, ajustable a un brazo manipulador semiautomatizado, CARACTERIZADO porque el dispositivo comprende: (i) un sistema de agarre del cono explosivo; (ii) un resorte de ajuste; (iii) un plato soporte; (iv) dos cilindros neumáticos de empuje; (v) un motor neumático para rotación; (vi) un motor neumático para inclinación con sistema tornillo sin fin y corona; (vii) un soporte de unión; y (viii) una cubierta protectora que cubre el cilindro neumático y los motores neumáticos.
PDF original: ES-2718981_T3.pdf
Disposición de rampa con característica de extracción.
(17/05/2019) Elemento adaptado para liberar un objeto agarrado por una unidad de agarre, en el que dicha unidad de agarre incluye una pluralidad de dedos de agarre para agarrar el objeto, comprendiendo dicho elemento :
un cuerpo (3202A) tubular que comprende una perforación (3202B) axial central que discurre por la longitud del cuerpo (3202A) tubular con un primer extremo (3202C) y un segundo extremo (3202D), en el que el cuerpo (3202A) tubular está configurado para recibir al menos una porción de dicho objeto en dicha perforación (3202B) axial central a través de dicho primer extremo (3202C),
caracterizado porque
el primer extremo (3202C) incluye una pluralidad de ranuras paralelas al eje de la perforación (3202B) axial central y que están abiertas en el primer extremo (3202C),…
Dispositivo de soporte y agarre, en particular para líneas de llenado y/o cierre de recipientes.
(15/05/2019) Dispositivo para soportar y agarrar recipientes (1, 1a), que comprende:
- una base que define una superficie superior para soportar un recipiente (1,1a);
- medios de agarre para agarrar el recipiente (1,1a), asociado con dicha base ;
- medios de accionamiento para accionar los medios de agarre para agarrar el recipiente (1,1a), en el que dichos medios de agarre comprenden al menos un par de mordazas , rotando cada mordaza entre una posición, pivotada hacia abajo, contenida sustancialmente por debajo de una superficie superior de la base , y una posición elevada para agarrar el recipiente (1,1a) situado sobre la superficie superior, en el que dichos medios de agarre comprenden además al menos un par de deslizadores , en el que cada deslizador se inserta en la base dentro de un asiento…
(16/10/2018) Garra para levantar y bajar cargas, con la siguiente configuración:
- ésta comprende una pieza de acoplamiento que sirve para acoplar a una carga y una pieza de conexión que sirve para conectar con un elemento de tope,
- la pieza de conexión es guiada de forma móvil en la pieza de acoplamiento a lo largo de un eje de movimiento entre una primera posición final (E1) y una segunda posición final (E2), estando en la primera posición final los extremos de dichas piezas enfrentados mutuamente más separados que en la segunda posición final,
- en la pieza de acoplamiento están presentes al menos dos elementos de pestillo…
Accionamiento de una mano destinada a equipar un robot de carácter humanoide.
(15/10/2018) Mano destinada a equipar un robot de carácter humanoide, comprendiendo la mano una palma y varios dedos motorizados con respecto a la palma , un accionador común a varios dedos y un distribuidor que permite repartir un esfuerzo (F5) ejercido por el accionador hacia los dedos ,
caracterizada porque se define en un plano denominado plano frontal perpendicular a una dirección en la que está orientado el esfuerzo ejercido por el accionador , la proyección del punto de aplicación sobre el distribuidor del esfuerzo (F5) ejercido por el accionador y las proyecciones de los puntos de aplicación…
Dispositivo para el desbroce fino de una hoja multicapa que comprende un recubrimiento de apoyo y al menos una película adhesiva acoplada con el recubrimiento.
(25/01/2017) Un dispositivo para el desbroce fino de una hoja multicapa que comprende un recubrimiento de soporte y al menos una película adhesiva acoplada con el recubrimiento, donde la película comprende a su vez una pluralidad de elementos gráficos rodeados periféricamente por cortes y una maleza entre dichos elementos gráficos, donde el dispositivo comprende: una pinza con un cabeza de sujeción que tiene un desarrollo axial simétrico alrededor de un eje (Z, Z ') central, la cabeza que comprende una pluralidad de mandíbulas de autocentrado que se pueden mover radialmente cerca a y alejarse de dicho eje (Z) central, y unos respectivos medios de sujeción de porciones de dicha…
Estación de trabajo de inflado.
(18/01/2017) Una estación de trabajo de inflado para inflar un conjunto (TW) de neumático-rueda que incluye un neumático (T) montado en una rueda (W), que comprende:
un dispositivo de trabajo que tiene un efector de extremo, en donde el efector de extremo incluye un elemento de émbolo de acoplamiento de rueda,
y
un aparato de inflado conectado al elemento de émbolo de acoplamiento de rueda en donde el aparato de inflado incluye al menos una sonda (614a, 614b, 614a', 614b') de inflado, que se extiende desde un elemento de base de aparato de inflado;
en donde al menos una sonda (614a, 614b, 614a', 614b') de inflado incluye:
una parte de extremo distante formada de más de un material (M) que incluye un primer material (M1) y un segundo material (M2), en donde el segundo material (M2) incluye una característica…
MANO PROTÉSICA MULTIARTICULADA MOTORIZADA Y CONTROLABLE COMPLETAMENTE POR EL USUARIO.
(17/11/2016) Una mano protésica multiarticuiada motorizada y controlable completamente por el usuario, del tipo conformada por una sección de antebrazo que define un sockeí de conexión en su extremo distal, adaptado para recibir y fijar firmemente el muñón del antebrazo de un paciente amputado y que comprende en su extremo proximal un medio de conexión que define una sección de muñeca que se acopla pivotalmente en la mano protésica, la cual comprende una pluralidad de dedos articulados; caracterizada el dedo pulgar se conforma por un metacarpio, una falange próxima! y una falange distal conectadas entre si mediante conexiones articuladas tipo rotula; y los dedos índice, medio, anular y meñique, están conformados éstos por una…
Proceso para recubrir un sustrato poroso con un líquido de recubrimiento.
(22/01/2016) Un proceso para acoplar y liberar un sustrato poroso , que comprende:
(a) proporcionar un aparato que tiene una plataforma para la colocación del sustrato poroso , dicho aparato teniendo también una cabeza de acoplamiento que incluye al menos dos conjuntos de clavijas que pueden extenderse o retraerse al unísono por una única fuente de accionamiento, cada conjunto de clavijas incluyendo una pluralidad de clavijas dispuestas en una pluralidad de filas de clavijas paralelas a un ángulo de clavija predeterminado, en el que las clavijas de filas de clavijas inmediatamente colindantes están dispuestas de tal manera que los ángulos de clavija para las clavijas en una fila de clavijas son inversamente simétricos a los ángulos de clavija para las clavijas en una fila…
MAQUINA ROBOTICA PARA EL RETIRO E INSERCION DE PARRILLAS TROMMEL Y SU METODO DE OPERACION.
(19/11/2015). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: CARMONA ACOSTA,Carlos.
Máquina robótica para el retiro e inserción de parrillas o palmetas del Trommel, que comprende una herramienta para la toma de la palmeta, un brazo robótico de 6 grados de libertad que manipula la herramienta y que permite retirar y reponer la palmeta y una viga principal móvil que se ancla a la estructura del edificio o lugar de instalación o de montaje y que permite desplazar el manipulador o brazo robótico e introducirlo al interior del Trommel para desarrollar la operación. Además, se describe el método de operación de dicha máquina robótica.
Dispositivo y procedimiento de montaje de un neumático con la ayuda de un robot.
(07/05/2014) Procedimiento para el montaje de un neumático sobre una llanta de base honda de una rueda de vehículo, en el que el neumático (R) es agarrado en una posición de utilización por la superficie de rodadura mediante una pinza dispuesta sobre el brazo articulado de un robot de manipulación , siendo dicho brazo articulado movible en tres direcciones, es acercado a la llanta (F) retenida en un dispositivo de sujeción por el robot de manipulación y es deslizado con el primer talón de neumático dirigido hacia la llanta (F) por encima de una pestaña de la llanta (F) por un movimiento controlado de la pinza que retiene el neumatico (R), caracterizado por que después del montaje del primer talón del neumático, la pinza es separada del neumático (R) y el…
(11/12/2013) Una mano artificial adecuada para aplicaciones robóticas como prótesis, que comprende un armazón con un pulgar y al menos dos dedos , y tiene una transmisión por motor con respecto al armazón para ajustar el pulgar y los dedos con respecto al armazón , en el que la transmisión por motor tiene un cárter y un eje posicionado de forma rotatoria sin cárter , y en el que los dedos están conectados al eje , caracterizada porque el cárter está montado en un primer rodamiento (9') soportado por el armazón para permitir que el cárter pueda girar con respecto al armazón y porque el pulgar está conectado al cárter.
Dispositivo para el montaje de un neumático sobre una llanta de una rueda de vehículos.
(02/07/2013) Dispositivo para el montaje de un neumático sobre una llanta de una rueda de vehículo, con un robot demanipulación que presenta una mano robótica móvil sobre varios ejes con una brida accionable de manera giratoria,y con una pinza colocada en la mano robótica que presenta un cuerpo de base y al menos dos brazos de pinzamóviles de manera radial al eje medio de la pinza, estando los brazos de pinza acoplados a un dispositivosincronizador que sincroniza el movimiento radial de los brazos de pinza, en el cual el dispositivo sincronizadorpresenta un disco montado en el elemento de base de la pinza y giratorio sobre…
(25/10/2010) Sujetador para sujetar, fijar, recoger y suministrar productos delicados (P), por ejemplo frutas o verduras, más particularmente manzanas, peras o pepinos, en el que cada producto se recoge con el sujetador desde una posición que se encuentra sustancialmente horizontal, en el que el sujetador comprende al menos dos superficies de acoplamiento y en el que tras el acoplamiento y la recogida, el producto está en contacto con el sujetador en una posición, al menos, de dos puntos de contacto,
caracterizado porque,
en la posición de los puntos de contacto, el sujetador comprende al menos dos tiras de acoplamiento…
DISPOSITIVO DE AGARRE CON MEDIOS DE ACCIONAMIENTO ELECTROMAGNETICOS.
(16/05/2005) Dispositivo para agarrar y a continuación desplazar un objeto a una posición de entrega, que comprende una herramienta de agarre suspendida de un carro y provista con al menos tres dedos, cada uno de las cuales es pivotable con relación a un portador y que son desplazables por medio de medios de control desde una posición extendida a una posición cerrada y viceversa, que se caracteriza porque los medios de control están formados por una bobina conectada al portador y un núcleo magnético que es desplazable dentro de la bobina y está acoplado a los dedos , y el cual consiste de un sistema de imanes permanentes , cuya bobina puede ser activada por una corriente, en el que los imanes están dispuestos en el sistema magnético a una distancia axial entre sí que es menor…
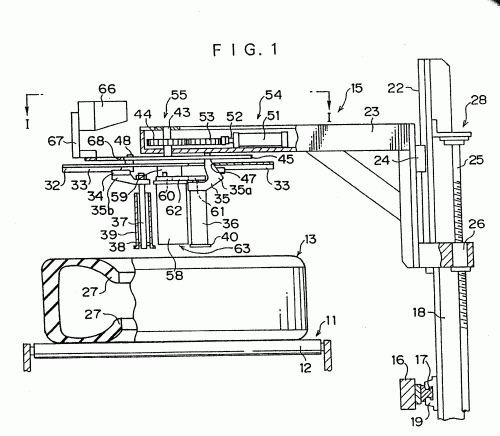
APARATO DE PINZA PARA NEUMATICO Y PROCEDIMIENTO PARA LA SUJECCION DE UN NEUMATICO.
(16/05/2005). Ver ilustración. Solicitante/s: BRIDGESTONE CORPORATION. Inventor/es: KOKUBU, TAKAO.
Aparato de pinza para neumático para la sujeción de un neumático que presenta un talón de neumático , comprendiendo dicho aparato: (a) un mecanismo de agarre con por lo menos dos elementos de agarre que pueden desplazarse en dirección radial del neumático desde una posición retraída a una posición extendida para ejercer presión sobre el lado interior de la parte del talón del neumático sujetando de este modo el neumático; (b) unos rodillos de agarre como elementos de agarre adaptados para girar en torno a un eje sustancialmente paralelo a la línea axial central del neumático ; y (c) un mecanismo de accionamiento de giro para hacer girar el neumático en torno a la línea axial central del mismo.
{kind=link}