CIP-2021 : B25J 18/04 : rotativos.
CIP-2021 › B › B25 › B25J › B25J 18/00 › B25J 18/04[2] › rotativos.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 18/00 Brazos.
B25J 18/04 · · rotativos.
CIP2021: Invenciones publicadas en esta sección.
Aparatos y procedimientos para el accionamiento remoto de puntos de control.
(24/06/2020) Aparato para el accionamiento remoto de un punto de control , que comprende:
un elemento alargado que tiene un primer extremo y un segundo extremo,
un elemento de apoyo que tiene una parte móvil , la parte móvil está acoplada de manera ajustable con el elemento alargado a lo largo de cualquier parte de la longitud del elemento alargado de manera que el primer extremo y el segundo extremo del elemento alargado están libres del contacto con el aparato para el accionamiento remoto de un punto de control durante una función de accionamiento;
un mecanismo de impulso en comunicación con la parte móvil , el mecanismo de impulso está configurado para proporcionar par a la parte móvil y al elemento alargado en respuesta a una fuerza motriz, en el que el mecanismo de impulso está desplazado de la parte móvil …
Aparato y sistema de brazo articulado.
(08/04/2020) Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato:
un árbol que tiene un eje de rotación, en el que el árbol está configurado para pasar a través de una abertura en la cámara aisladora sellable y está configurado para rotar alrededor del eje;
un elemento de sellado , que incluye:
una superficie de montaje configurada para montar el elemento de sellado en y sellar herméticamente el mismo a una superficie interior de la cámara aisladora sellable, de manera que en uso la superficie de montaje y la superficie interior rodean de manera continua la abertura en la cámara aisladora sellable,
una superficie de sellado de árbol definida por el elemento…
Procedimiento y dispositivo de mecanizado de un molde para la fabricación de un aparato ortopédico.
(27/07/2016). Solicitante/s: Orthopedie Bontoux G.A. Inventor/es: PAITEL,YANN.
Procedimiento de mecanizado de un molde para la fabricación de un aparato ortopédico, con la ayuda de una máquina de al menos cinco ejes que lleva una herramienta rotatoria, en el cual la máquina es un robot que comprende al menos cinco articulaciones (AX1 a AX5) giratorias en serie, y en el cual :
- se fija una pieza en bruto del molde a un soporte montado rotatorio según un eje de rotación,
- se dispone sucesivamente una pieza en bruto del molde en varias posiciones de mecanizado distintas con respecto al robot, por rotación del soporte rotatorio, y
- para cada una de estas posiciones de mecanizado, se mecaniza la pieza en bruto manteniendo la dirección de la herramienta sensiblemente fija, y desplazando la extremidad de la herramienta a lo largo de trayectorias sucesivas que se extienden en planos (Pld) de desplazamiento paralelos.
PDF original: ES-2588015_T3.pdf
Robot de dos ejes para la transferencia de especímenes.
(08/07/2015) Un sistema con un robot de dos ejes para transferir un recipiente de espécimen de una primera localización de referencia sobre una primera cinta transportadora a una segunda localización de referencia separada de la primera cinta transportadora , comprendiendo el sistema:
a) un recipiente de espécimen ;
b) un primer portamuestras que es generalmente rectangular y que tiene una línea central longitudinal horizontal;
c) un segundo portamuestras que es generalmente rectangular y que tiene una línea central longitudinal horizontal;
d) un marco para soportar el robot;
e) un poste verticalmente orientado que tiene un eje de rotación vertical, dicho poste montado para la rotación selectiva…
Manipulador quirúrgico para un sistema telerrobótico.
(23/10/2013) Un aparato para su uso en un sistema quirúrgico robótico que comprende:
un instrumento quirúrgico y un conjunto manipulador que tiene un porta-instrumento que está montado deforma liberable en una base y un conjunto de accionamiento para manipular el instrumento quirúrgico ,que está acoplado de forma liberable al porta-instrumento , en al menos dos grados de libertad;
en donde el instrumento quirúrgico comprende:
un eje que tiene un extremo distal y un extremo proximal ; un efector extremo accionable enel extremo distal de dicho eje ; al menos un elemento alargado conectado al efector extremo para causar el accionamiento de dicho efector extremo…
DISPOSITIVO PARA CARGAR Y DESCARGAR PIEZAS DE TRABAJO OPTICAS.
(16/03/2005) Dispositivo para cargar y descargar piezas de trabajo ópticas, en especial lentes ópticas, para una máquina óptica , con un brazo de carga accionado de forma pivotante alrededor de un eje (A), que puede pivotar en desarrollos de movimiento controlados entre un depósito para piezas de trabajo y la posición de mecanización en la máquina óptica y está provisto, en su extremo exterior, de un mecanismo para tomar y depositar piezas de trabajo, en el que el eje pivotante (A) del brazo de carga es el eje central de un husillo que se puede accionar mediante elementos de accionamiento de forma giratoria en ambas direcciones de giro (D+, D-) y con movimiento elevador…
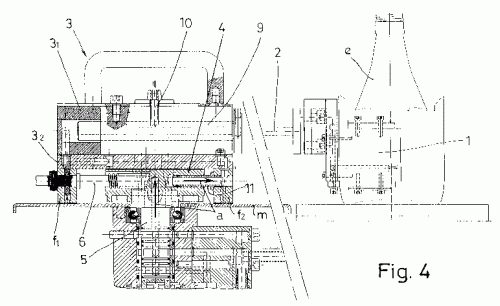
SACADOR DE BOTELLAS PARA MAQUINAS DE MOLDEO DE VIDRIO HUECO.
(16/10/2003). Ver ilustración. Solicitante/s: VIDRALA S.A. AVACON S.A.. Inventor/es: DUTTO FANTINI,IVO, ARECHAGA CAMARA,ALFONSO, ARAGON LOPEZ,ANTONIO.
Sacador de botellas para máquinas de moldeo de vidrio hueco, de los que constan de unos dedos manipuladores de las botellas, un cabezal unido a un eje de giro de posición fija y que incorpora al menos un cilindro de acción fluídica cuyo vástago está unido a los dedos, constando el cabezal de un cabezal móvil portador de el/los cilindro(s) de acción fluídica, una base de cabezal unida al eje de giro de posición fija y medios tuerca-tornillo para desplazar el cabezal móvil respecto a la base del cabezal. Aplicable en la industria del vidrio.
{kind=link}