CIP-2021 : B62D 57/02 : con medios de propulsión en contacto con el suelo, p. ej. por piernas mecánicas.
CIP-2021 › B › B62 › B62D › B62D 57/00 › B62D 57/02[1] › con medios de propulsión en contacto con el suelo, p. ej. por piernas mecánicas.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
Notas[g] desde B62D 47/00 hasta B62D 63/00: Vehículos de motor o remolque según el tipo; Sus piezas o accesorios no previstos en otro lugar
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES.
B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M).
B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M).
B62D 57/02 · con medios de propulsión en contacto con el suelo, p. ej. por piernas mecánicas.
CIP2021: Invenciones publicadas en esta sección.
Robot oruga y plataforma de soporte.
(15/05/2019) Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga:
un primer sistema de movimiento configurado para mover el robot oruga y el sistema de oruga a lo largo de una superficie no plana, donde el sistema de oruga es un sistema de oruga flexible configurado para doblarse para adaptarse sustancialmente a un contorno de la superficie no plana; y
un segundo sistema de movimiento configurado para mover el robot oruga a lo largo del sistema de oruga flexible en la superficie 230, en el que:
el primer sistema de movimiento puede moverse entre un estado 215 extendido y un estado retraído; cuando el primer sistema de movimiento está en estado extendido, el sistema de oruga flexible no puede extenderse…
Estabilizador de robot de dos ruedas para lanzar.
(12/08/2015) Estabilizador de robot móvil de dos ruedas compuesto por dos lastres de caucho conectados a un armazón de robot y dispuestos de manera simétrica en relación con un plano medio ortogonal a un eje de rueda de robot y por un rodillo de caucho fijado de manera que puede girar sobre un árbol incrustado en orificios en los extremos de los lastres , teniendo cada lastre cortes radiales diseñados para la unión al armazón del robot.
Método y dispositivo de tracción por impulsos.
(19/03/2013) Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma recíproca entre una posición proximal y unaposición distal; teniendo cada elemento de soporte un coeficiente de rozamiento variable con respecto a unasuperficie de soporte (S, W), de tal modo que durante un movimiento de aproximación recíproco predomina unafuerza de rozamiento (Ff1) desarrollada por uno de dichos elementos de soporte (Ff1 >Ff2, Ff1< f2) y durante unmovimiento de alejamiento recíproco de dichos elementos de soporte predomina una fuerza de rozamiento (Ff2)desarrollada…
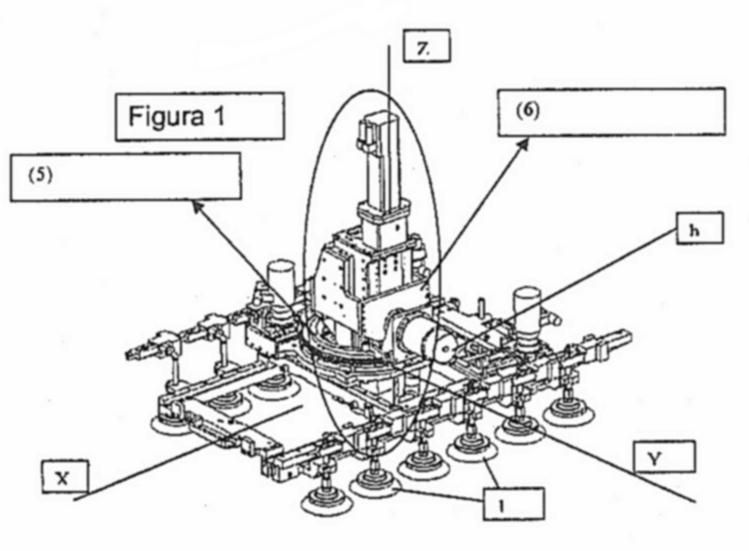
MAQUINA-HERRAMIENTA ROBOTIZADA PORTATIL.
(01/01/2008). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Inventor/es: COLLADO JIMENEZ, VALENTIN, AZPIAZU ALBERDI,PEDRO, ARANA GARATE,JON.
Máquina-herramienta robotizada portátil, que consta de un bastidor en el que se disponen una serie de ventosas para su fijación sobre una pieza a trabajar; un primer carro que se traslada en el bastidor según el eje X; un segundo carro que se traslada en el primer carro según el eje Y; una plataforma giratoria dispuesta en el segundo carro y que gira sobre el eje Z, siendo X, Y, Z ejes perpendiculares entre sí, dejando un espacio libre (e) pasante a través del bastidor , del primer carro y del segundo carro y de la plataforma giratoria ; un soporte basculante dispuesto sobre la plataforma giratoria y que gira sobre un eje secundario (b) situado en un plano perpendicular al eje Z; un cuarto carro que se traslada respecto al soporte basculante ; y un cabezal montado en el cuarto carro y portador de la herramienta de mecanizado.#De aplicación en máquina-herramienta.
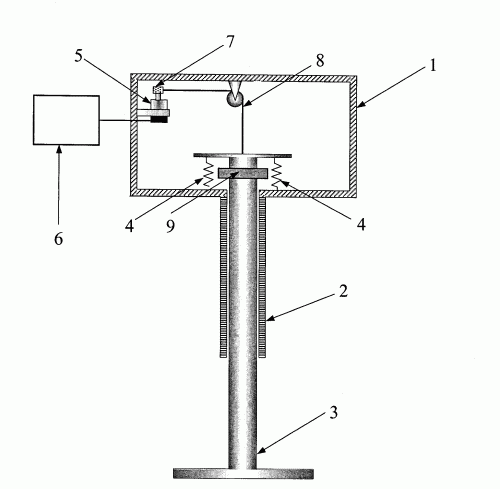
ROBOT SALTADOR Y PROCEDIMIENTO PARA SU CONTROL.
(01/10/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, FERNANDEZ SAAVEDRA,ROEMI EMILIA, MONTES FRANCESCHI,HECTOR.
Robot saltador y procedimiento para su control. Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte con uno de sus extremos unido al cuerpo del robot, y una cadena cinemática entre el motor y el resorte que comprende un cilindro conectado con el eje del motor y una cuerda , con uno de sus extremos conectado al cilindro y con el segundo extremo conectado al pie . El procedimiento de control se caracteriza porque en el momento en el que el pie pierde el contacto con el suelo se hace girar al motor un ángulo {al}, y se mantiene en dicha posición hasta el próximo contacto del pie con el suelo, momento en el que se hace girar al motor un ángulo -{al}.
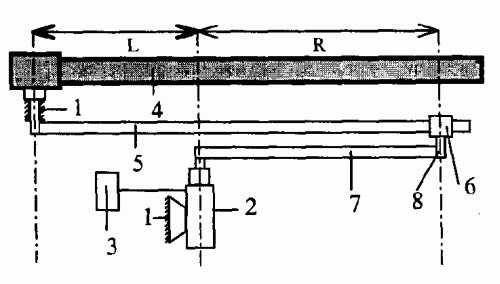
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL.
(16/03/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, FERNANDEZ SAAVEDRA,ROEMI EMILIA.
Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos de arranque-parada, que se caracteriza porque la conexión cinemática entre el motor y el elemento de trabajo contiene un eslabón móvil conectado a la base y con posibilidad de rotación alrededor del punto de conexión, una corredera que se desliza a lo largo del eslabón móvil , y una manivela conectada cinemáticamente con el motor y unida a charnela por medio del dedo con la corredera . El procedimiento para su control se caracteriza porque el movimiento del elemento de trabajo se realiza a través del eslabón móvil , rotando la manivela con la ayuda del motor y porque las posiciones de arranque y parada están determinadas por el ángulo formado entre la manivela y el eslabón móvil.
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE.
(16/10/2003). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS. Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL, CABALLERO,RONY JAVIER.
Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento móvil, con un motor localizado en el elemento móvil, con un elemento base de la pierna el cual es conectado con el elemento móvil por medio de una articulación de rotación conectada cinemáticamente con el motor, distinguido en que el circuito cinemático entre el motor y el elemento base de la pierna tiene un mecanismo de biela-manivela y la manivela esta conectada cinemáticamente con el motor y la biela esta conectada con el elemento base de la pierna por medio una articulación de rotación, la longitud de la manivela es menor que la distancia entre las dos articulaciones de rotación en el elemento base de la pierna.
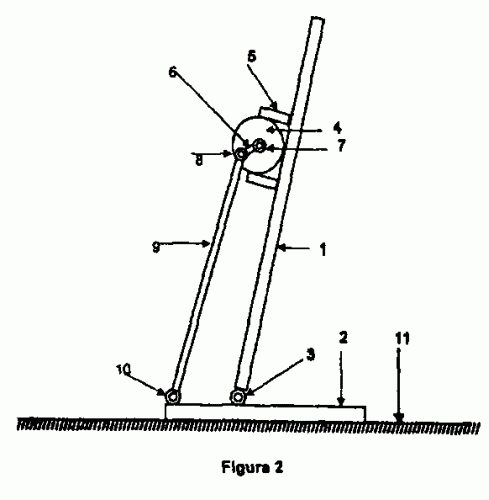
Aparato estabilizado por giróscopo, y en particular un robot bípedo.
(16/05/2002). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: VILLEDIEU, ERIC.
Aparato compuesto por al menos una pierna de apoyo y un cuerpo superior unido a la pierna de apoyo, y configurado a modo de péndulo inverso con relación a la gravedad, en el que el cuerpo superior comprende un molinete giroscópico que gira en torno a un eje de rotación , y que se encuentra alojado en una caja , que se caracteriza porque la caja está conectada al cuerpo superior por medio de una unión mecánica que permite movimientos de rotación según dos ejes no paralelos, incluyendo el aparato captadores que permiten medir un efecto de desequilibrio producido por la gravedad sobre el aparato, medios que permiten equilibrar el aparato ejerciendo esfuerzos antagonistas, apoyando sobre el molinete giroscópico con la ayuda de accionadores , y un sistema de comando asociado, capacitado para sacar provecho de los accionadores y captadores del aparato para equilibrarlo.
VEHICULO DE ESTRUCTURA GIRATORIA RODANTE.
(01/02/2000) 1. VEHICULO DE ESTRUCTURA GIRATORIA RODANTE, QUE ESTANDO ESPECIALMENTE CONCEBIDO PARA DESPLAZARSE SOBRE LA SUPERFICIE DE AGUA, SE CARACTERIZA POR ESTAR CONSTITUIDO A PARTIR DE UN CUERPO EXTERNO, DE ESTRUCTURA RIGIDA Y TRANSPARENTE, DE REVOLUCION, PREFERENTEMENTE ESFERICO, PROVISTO DE EJES LATERALES QUE PERMITEN SU LIBRE GIRO CON RESPECTO A UNA ESTRUCTURA INTERNA, Y PROVISTO ADEMAS DE UNA O MAS PISTAS DE RODADURA INTERIORES, SITUADAS SEGUN PLANOS PERPENDICULARES AL EJE DE GIRO Y A TRAVES DE LAS QUE SE RELACIONA CON DICHO CUERPO ESFERICO LA ESTRUCTURA INTERIOR PROVISTA DE UN MOTOR Y DE UNA TRANSMISION ADECUADA QUE RELACION DICHO MOTOR CON LA PISTA O PISTAS DE RODADURA, DE MANERA QUE EL ACCIONAMIENTO DE DICHO MOTOR PROVOCA UN MOVIMIENTO GIRATORIO DE CUERPO ESFERICO EXTERIOR, CON EL CORRESPONDIENTE AVANCE SOBRE EL AGUA, MIENTRAS QUE LA ESTRUCTURA INTERNA…
(01/03/1999) UN DISPOSITIVO PARA VIAJE QUE COMPRENDE MEDIOS DE CHASIS Y MEDIOS DE DESPLAZAMIENTO MONTADOS SOBRE LOS MEDIOS DE CHASIS PARA VIAJAR SOBRE UNA SUPERFICIE DE CARRERA Y QUE COMPRENDE UNA PLURALIDAD DE RUEDAS O UNA PLURALIDAD DE RAILES SIN FIN, INCLUYENDO CADA UNO UNA PLURALIDAD DE RUEDAS PARA CORREA, EN DONDE LOS MEDIOS DE CHASIS INCLUYEN UN ARMAZON PRINCIPAL, UN PAR DE ARMAZONES DE NAVEGACION DISPUESTOS SOBRE LOS LATERALES DEL ARMAZON PRINCIPAL, Y UN ARMAZON DE CONEXION DISPUESTO SOBRE UN EXTREMO DEL ARMAZON PRINCIPAL, EN DONDE LA PORCION CENTRAL DEL ARMAZON DE CONEXION ESTA CONECTADO AL ARMAZON PRINCIPAL A TRAVES DE UNOS MEDIOS ACOPLADOS AL EJE DE NAVEGACION, EN…
APARATO CAPAZ DE ADHERIRSE POR SUCCION A UNA SUPERFICIE Y DE MOVERSE A LO LARGO DE LA MISMA.
(01/10/1997) UN APARATO QUE PUEDE SER SACADO A UNA SUPERFICIE Y MOVERSE A LO LARGO DE LA MISMA QUE CONSTA DE UN CUERPO RECEPTOR DE UNA PRESION, UN DISPOSITIVO DE SEPARACION MONTADO SOBRE EL CUERPO RECEPTOR DE PRESION PARA QUE COOPERE CON EL CUERPO RECEPTOR DE PRESION Y CON LA SUPERFICIE PARA DEFINIR UN ESPACIO REDUCTOR DE LA PRESION, Y UN DISPOSITIVO REDUCTOR DE LA PRESION PARA DESCARGAR UN FLUIDO DEL ESPACIO REDUCTOR DE LA PRESION PARA REDUCIR LA PRESION DEL ESPACIO REDUCTOR DE PRESION. EL DISPOSITIVO DE SEPARACION INCLUYE UNA PORCION DE REBORDE QUE SE EXTIENDE A LO LARGO DE LA SUPERFICIE. EN UNA PORCION DEL DISPOSITIVO, EXCEPTO EN LA PORCION PERIFERICA EXTERIOR DE UNA SUPERFICIE OPUESTA DE LA PORCION DE REBORDE, Y COLOCADOS DE MODO QUE QUEDEN ENFRENTE DE…
(01/07/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: SABOURIN, DIDIER, GARREC, PHILIPPE, DE BEAUCOURT, PHILIPPE, MORGANTI, PHILIPPE.
PIE DE ROBOT MARCHADOR QUE COMPRENDE EN PARTICULAR UNOS MEDIOS DE ORIENTACION AUTOMATICA DE LA SUELA, UNOS CAPTADORES DE INCLINACION DE LA SUELA, UNOS CAPTADORES DE CONTACTO CON EL SUELO PARA VERIFICAR LA EXTENSION DEL APOYO, UNOS RESORTES AMORTIGUANTES DE COMPRESION DE LA ARMADURA DEL PIE PARA NO APLICAR EL ESFUERZO MAS QUE PROGRESIVAMENTE Y EVENTUALMENTE UN REBORDE LATERAL DE DETECCION DE OBSTACULOS. TODOS LOS MEDIOS CONTRIBUYEN A EXCLUIR APOYOS ARRIESGADOS.
MOVIL AUTONOMO PARA EL TRANSPORTE DE UN UTIL A VELOCIDAD CONSTANTE.
(01/12/1992). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: JAUBERT, PHILIPPE, CASTELAIN, YVES, PELTIER, RENE.
PARA DESPLAZAR UN UTIL DE TRABAJO A VELOCIDAD CONSTANTE SOBRE UNA SUPERFICIE DE FORMA Y ORIENTACION CUALQUIERA, ESPECIALMENTE PARA DECAPAR, APOMAZAR, PINTAR O DECORAR LA SUPERFICIE EXTERIOR DE UNA AERONAVE, SE UTILIZA UN MOVIL AUTONOMO DE CONCEPCION PARTICULAR. EL MOVIL COMPRENDE DOS CONJUNTOS DE ENGANCHE EQUIPADOS CADA UNO CON ORGANOS DE ENGANCHE APTOS PARA APROXIMARSE Y ALEJARSE DE LA SUPERFICIE, Y UN CONJUNTO PORTA-UTIL . ESTOS TRES CONJUNTOS PUEDEN DESPLAZARSE UNOS CON RELACION A OTROS SEGUN UNA DIRECCION DADA. UNOS MEDIOS DE CONTROL SOSTENIDOS POR EL CONJUNTO PORTA-UTIL ASEGURAN A LA VEZ EL AVANCE A VELOCIDAD CONSTANTE DE ESTE CONJUNTO SOBRE EL CONJUNTO DE ENGANCHE FIJADO EN LA SUPERFICIE, Y EL AVANCE EN EL MISMO SENTIDO Y A MAYOR VELOCIDAD DEL OTRO CONJUNTO DE ENGANCHE, LOS DOS CONJUNTOS DE ENGANCHE SE FIJAN CADA UNO CUANDO LE TOCA SOBRE LA SUPERFICIE SIN PARADA DEL CONJUNTO PORTA-UTIL.
PERFECCIONAMINETOS EN VEHICULOS TODO TERRENO, DE MOVIMIENTO POR PASOS, Y CON FUENTE DE ENERGIA PROPIA.
(16/05/1988). Solicitante/s: WERDER, MARTIN.
LA INVENCION CREA UN VEHICULO PARA TODO TERRENO QUE SE DISTINGUE POR LA COMBINACION DE DOS PATAS DE DAR PASOS (4, 4K), HIDRAULICAMENTE ACCIONADAS, EN EL LADO DELANTERO DEL VEHICULO, CON DOS RUEDAS (6, 6K) HIDRAULICAMENTE AJUSTABLES EN ALTURA Y GUIADAS A LO LARGO DE SOPORTES LONGITUDINALES, EN EL LADO TRASERO DEL VEHICULO. EL MOVIMIENTO O DESPLAZAMIENTO TIENE LUGAR POR MOVIMIENTOS CORRESPONDIENTES DE PALANCAS A MANO Y AMPLIADORES DE FUERZA. UN ORDENADOR DE A BORDO SE OCUPA AUTOMATICAMENTE DE QUE LA CABINA ESTE SIEMPRE EN UNA OPOSICION APROXIMADAMENTE HORIZONTAL Y CALCULA CONTINUAMENTE SI EL CENTRO DE GRAVEDAD SE ENCUENTRA EN TODO MOMENTO DENTRO DE LOS TRES PUNTOS DE APOYO, CUANDO SE LEVANTA UNA PATA. EL PUNTO DECISIVO DE LA INVENSION ESTRIBA EN LA COMBINACION DE LAS VENTAJAS DE PATAS DE DAR PASOS (4, 4K) CON LAS VENTAJAS QUE OFRECEN RUEDAS (6, 6K). EL MANDO DE LOS ORGANOS DE DAR PASOS ES SIMPLIFICADO POR EL HECHO DE QUE SOLO SE TRATA DE DOS ORGANOS.
METODO Y SU CORRESPONDIENTE MAQUINA PARA DESPLAZAR UNA PLATAFORMA CARGADA.
(16/04/1981). Solicitante/s: BATEMAN LIMITED,EDWARD L.
MECANISMO HIDRAULICO PARA DESPLAZAR UNA MAQUINA CARGADORA. LA MAQUINA DESCANSA SOBRE LAS SUPERFICIES DE APOYO . ENCIMA DE UNA TERCERA SUPERFICIE DE APOYO SE COLOCA UN GATO HIDRAULICO DE DOBLE ACCION, CUYO CILINDRO SE CONECTA AL BASTIDOR POR MEDIO DE UNA JUNTA DE ROTULA ESFERICA . LLEVA OTROS DOS GATOS MAS PERPENDICULARES A ESTE ULTIMO PARA PODER AVANZAR LA MAQUINA EN CUALQUIER SENTIDO, SINCRONIZADAMENTE.
MECANISMO DE AVANCE PASO A PASO PARA HACER AVANZAR INSTALACIONES MECANICAS.
(16/09/1980). Solicitante/s: FRIED. KRUPP GESELLSCHAFT MIT BESCHRANKTER HAFTUNG.
Mecanismo de avance paso a paso para hacer avanzar instalaciones mecánicas, con una plataforma provista con patas y un bastidor intermedio con un grupo de patas elevadoras ajustables en su longitud, siendo la plataforma y el bastidor intermedio susceptibles de deslizar una con relación al otro, caracterizado porque el bastidor intermedio consta de cuatro partes de bastidor dispuestas en forma de un cuadrilatero, las cuales están unidas de manera en sí conocida una con otra y con las pertinentes patas elevadoras mediante articulaciones, en que cada caso de entre dos patas elevadoras contiguas, dispuestas junto a los vértices del cuadrilatero, una es susceptible de bascular en lo esencial en el plano establecido por las patas elevadoras contiguas y la otra es susceptible de bascular transversalmente a este plano.
PERFECCIONAMIENTOS EN DISPOSITIVOS DE INSPECCION DE CUBAS DE REACTORES NUCLEARES.
(16/04/1977). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
PERFECCIONAMIENTOS EN LA CONSTRUCCION DE APARATOS ESCALADORES DE SUPERFICIES.
(01/05/1976). Solicitante/s: ROCKWELL INTERNATIONAL CORPORATION.
Resumen no disponible.
CARRO PARA EL TRANSPORTE DE ARTICULOS DE GRAN PESO.
(01/05/1975). Solicitante/s: MITSUI SHIPBUILDING & ENGINEERING CO. LTD.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}