CIP-2021 : B63C 11/52 : Herramientas o utillaje especialmente adaptado para trabajos bajo el agua, no previstos en otro lugar.
CIP-2021 › B › B63 › B63C › B63C 11/00 › B63C 11/52[1] › Herramientas o utillaje especialmente adaptado para trabajos bajo el agua, no previstos en otro lugar.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS.
B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52).
B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00).
B63C 11/52 · Herramientas o utillaje especialmente adaptado para trabajos bajo el agua, no previstos en otro lugar.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES.
(16/07/2020). Solicitante/s: UNIVERSIDAD SIMÓN BOLIVAR. Inventor/es: ABRIL HOWARD,Omar Santiago, VILLAREAL GONZALEZ,Reynaldo Farid, PESTANA NOBLES,Juan Pablo, OCHOA PERTUZ,Carlos Andres, RODRIGUEZ,Eugenio Yime.
La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos sumergidos; específicamente relacionado con un equipo para permanecer bajo el agua, los medios para buscar objetos sumergidos con cámaras de buceo unidas mecánicamente a una base de tipo cerrado con control independiente de propulsión y de dirección que consiste en un submarino tipo Vehículo Operado Remotamente (ROV - Remote Operated Vehicle) con seis motores: cuatro motores con empuje en el eje horizontal y dos motores con empuje el eje vertical; donde los motores de empuje horizontal cuentan giran sobre un eje en un ángulo de 0 a 45 grados y donde los motores están ubicados en una estructura adicional que permite el giro y bloqueo de los motores según el ecosistema o las condiciones ambientales a las cuales el Vehículo Operado Remotamente va a ser expuesto).
Robots móviles coordinados para entorno acuático.
(13/05/2020) Un sistema robótico de dos partes, acoplable selectivamente que proporciona estabilización contrabalanceada durante la realización de una operación en una estructura subacuática objetivo, que comprende:
un primer vehículo robótico subacuático dimensionado y conformado para rodear al menos parcialmente la estructura subacuática objetivo;
un segundo vehículo robótico subacuático dimensionado y conformado para rodear al menos parcialmente la estructura subacuática objetivo y estar, al menos parcialmente, orientado en una posición opuesta al primer vehículo robótico subacuático;
mecanismos de acoplamiento complementarios soportados por el primer y segundo vehículos robóticos subacuáticos…
Arado para fondo marino con capacidad para la liberación y recuperación sobre-la-popa en una configuración de despeje de pedregal.
(18/09/2019). Solicitante/s: Oceaneering International Services Limited. Inventor/es: WILSON,MICHAEL W. N.
Un método para despejar pedregales (B) de un camino (P) en un lecho marino (S) que comprende las etapas de:
posicionar un arado proa hacia delante en una dirección de un camino inicial de lecho marino (P1), el arado comprende un chasis y tiene:
un patín adelantado montado encima y que soporta un extremo adelantado de dicho chasis sobre un suelo del lecho marino (S); y
vertederas de babor y estribor montadas encima y orientadas en relación a un extremo de popa de dicho chasis sobre el suelo del lecho marino; y
propulsar el arado a lo largo del camino inicial de lecho marino para provocar que las vertederas despejen pedregales del camino inicial de lecho marino a los lados de babor y estribor del arado.
PDF original: ES-2762276_T3.pdf
DRON DE SALVAMENTO ACUATICO.
(20/03/2019) 1. Dron de salvamento acuático caracterizado por tener un sistema de impulsión y movimiento basado en cuatro hélices hidrodinámicas de movimiento diferencial situadas en la parte inferior del dron de salvamento acuático .
2. Dron de salvamento acuático según reivindicación 1, cuyo cuerpo del dispositivo incorpora en sus laterales perimetrales cuatro compuertas practicables .
3. Dron de salvamento acuático según reivindicaciones anteriores, caracterizado porque las cuatro compuertas practicables incorporan un sistema de bisagras para su apertura lateral.
4. Dron de salvamento acuático según reivindicaciones…
Sistema de cable de fibra óptica para vehículos subacuáticos telemaniobrados.
(20/02/2019). Solicitante/s: Bluefin Robotics Corporation. Inventor/es: HAWKES,GRAHAM, CHIAU,CHARLES S, WRIGHT,ADAM.
Un aparato que comprende:
un carrete para almacenar una fibra óptica ;
un motor para hacer girar el carrete y
un transductor de velocidad para detectar una velocidad de movimiento del aparato a través del agua; caracterizado porque el aparato comprende además un controlador acoplado al motor para controlar la retirada de la fibra óptica del carrete a una velocidad igual o mayor que la velocidad de movimiento detectada del aparato a través del agua.
PDF original: ES-2726800_T3.pdf
Un sistema y método de concentración de nódulos del fondo marino.
(19/11/2018) Un sistema de concentración de nódulos marinos que comprende:
un buque de superficie ;
un vehículo de dirección submarino asegurado al buque de superficie , el vehículo de dirección submarino adaptado para ser remolcado por el buque de superficie ;
un aparato de recogida de nódulos conectado al vehículo de dirección submarino , el aparato de recogida de nódulos situado en el suelo marino; y
un dispositivo de determinación de posición adaptado para determinar la posición del aparato de recogida de nódulos y comunicar información de posición del aparato de recogida de nódulos al vehículo de dirección submarino y al buque de superficie ,
caracterizado porque el buque de superficie arrastra cada uno del buque…
Vigilancia de minerales preciosos.
(25/09/2018). Solicitante/s: VDL Gold Pty Ltd. Inventor/es: CAMPBELL,JOHN GORDON MACKAY.
Un dispositivo de vigilancia en línea para detectar un material de interés en un material de explotación,
incluyendo el dispositivo:
una pluralidad de electrodos que incluyen al menos un primer electrodo, que es un electrodo positivo o negativo , y unos segundos y terceros electrodos que tienen una carga opuesta a la del primer electrodo,
estando el primer electrodo separado de los segundos y terceros electrodos por uno o varios espacios no conductores a través de los cuales puede pasar material de explotación,
estando el dispositivo configurado para detectar la presencia del material de interés en el material de explotación según pasa éste a través del espacio y forma una conexión eléctrica entre el primer electrodo y al menos uno de los segundos o terceros electrodos, caracterizado por que el primer electrodo está configurado para formar un circuito eléctrico diferente con cada uno de los segundos y terceros electrodos.
PDF original: ES-2683200_T3.pdf
Dispositivo y método para medir la ubicación de un vehículo submarino.
(18/01/2017). Solicitante/s: SAMSUNG HEAVY IND. CO. LTD. Inventor/es: LEE,JAEYONG, BAEK,SANGHOON, CHOI,YUNKYU, PARK,YOUNGJUN, EUN,JONGHO.
Un aparato para medir la ubicación de un vehículo submarino, que comprende:
una unidad generadora de información del casco que divide una superficie del casco en una pluralidad de áreas y que genera información del vector normal para cada información del área y del nivel que es la información de una profundidad a la que cada área se sumerge en el agua;
una unidad receptora de información del vehículo que recibe información de la orientación e información de la profundidad de un vehículo unido a la superficie del casco; y
una unidad de determinación de la ubicación que compara la información de la orientación del vehículo con la información del vector normal del área y que compara la información de la profundidad del vehículo con la información del nivel del área para determinar la ubicación del vehículo.
PDF original: ES-2621297_T3.pdf
Equipo para unir en vertical dos tramos de cadena.
(04/05/2016). Solicitante/s: VICINAY CADENAS, S.A.. Inventor/es: ABRISKETA LOZANO,NAGORE.
Equipo para unir en vertical dos tramos de cadena. Estando destinado el equipo para unir una primera cadena y una segunda cadena bajo el agua. Se caracteriza porque se determina a partir de una base inferior afectada de una escotadura abierta en forma de cruz donde se ajusta el último eslabón de la primera cadena asomando por encima de tal base inferior , a la vez que en correspondencia con tal escotadura y fijado a la base inferior se dispone un soporte guiador de la segunda cadena , en cuyo interior se ajusta un grillete en forma de "H" enganchado en el último eslabón de esa segunda cadena mediante un primer bulón , encajándose el último eslabón de la primera cadena en el hueco libre del grillete para enganchar ambas cadenas con un segundo bulón.
PDF original: ES-2635336_T3.pdf
Dispositivo de conexionado de grilletes.
(27/04/2016). Solicitante/s: VICINAY CADENAS, S.A.. Inventor/es: ABRISKETA LOZANO,NAGORE.
El dispositivo, previsto para conexionar un grillete con los eslabones de una cadena, a través de un bulón , comprende dos partes y , siendo la parte un cuerpo cilíndrico para guiado del bulón en su introducción/extracción. Lateralmente del cuerpo cilíndrico emerge y es desplazable una palanca unida al propio bulón para el desplazamiento de éste, mientras que la parte comprende una tuerca roscada sobre el extremo del bulón para el amarre de éste, complementándose con una manilla vinculable a la tuerca para llevar a cabo el apriete de éste por parte de un robot. Las partes y cuentan con cartelas y entre las que van montadas varillas pasantes roscadas por sus extremos para fijar entre sí dichas partes y.
PDF original: ES-2627770_T3.pdf
(25/03/2015) Aparato de inspección para detectar defectos en un objeto de análisis en un espacio llenado de líquido , en el que el aparato de inspección comprende un cuerpo de inspección provisto de una parte de soporte destinada a estar dispuesta sobre una superficie de soporte en el espacio llenado de líquido , un dispositivo de detección adaptado para detectar defectos en el objeto de análisis y un equipo de posicionamiento vertical adaptado para ajustar la posición del dispositivo de detección en una dirección vertical cuando la parte de soporte se dispone sobre la superficie de soporte , en el que el equipo de posicionamiento vertical comprende un elemento alargado que presenta una parte vertical (19b), un elemento de fijación adaptado para fijar el dispositivo de detección a la…
SISTEMA DE REGULACIÓN DE VOLUMEN PARA FUNDAS Y/O CONTENEDORES HERMÉTICOS DESTINADOS A LA PROTECCIÓN DE APARATOS ELECTRÓNICOS Y/O ELÉCTRICOS.
(26/02/2015). Ver ilustración. Solicitante/s: LLANES MENDEZ, Jordi. Inventor/es: LLANES MENDEZ,Jordi.
Sistema regulador de volumen mediante aire comprimido o cualquier otro tipo de fluido gaseoso formado por un cuerpo principal caracterizado porque presenta: un conducto a presión conectado a una fuente de aire comprimido o de cualquier fluido gaseoso comprimible , un pitorro de conexión conectado al conducto a presión que suministra aire comprimido al sistema de hinchado mediante una válvula de hinchado , un cuerpo principal que suministra aire a al menos a una funda hermética(l) y una parte adicional a la carcasa del cuerpo principal llamada membrana , que es solidaria a dicho elemento.
EQUIPO PARA UNIR EN VERTICAL DOS TRAMOS DE CADENA.
(06/11/2012) Equipo para unir en vertical dos tramos de cadena.
Estando destinado el equipo para unir una primera cadena y una segunda cadena bajo el agua.
Se caracteriza porque se determina a partir de una base inferior afectada de una escotadura abierta en forma de cruz donde se ajusta el último eslabón de la primera cadena asomando por encima de tal base inferior , a la vez que en correspondencia con tal escotadura y fijado a la base inferior se dispone un soporte guiador de la segunda cadena , en cuyo interior se ajusta un grillete en forma de "H" enganchado en el último eslabón de esa segunda cadena mediante un primer bulón , encajándose el último eslabón de la primera cadena en el hueco libre del grillete para enganchar…
EQUIPO PARA UNIR DOS TRAMOS DE CADENA.
(04/07/2012) Equipo para unir dos tramos de cadena.
Está destinado para unir una primera cadena y una segunda cadena bajo el agua.
Se caracteriza porque comprende un soporte de mesa cuya plataforma superior incorpora un surco longitudinal flanqueado por pares de asientos laterales donde apoyan unos eslabones terminales horizontales de ambas cadenas (14 y 15) a unir, estando flanqueado también dicho surco longitudinal por pares de topes enfrentados que delimitan unas guías verticales donde encajan los eslabones terminales verticales de tales cadenas .
El último eslabón de una de las cadenas incorpora un grillete en forma de "H" mediante un primer bulón , mientras que un segundo bulón engancha dicho grillete con la segunda cadena, incluyéndose para ello un dispositivo de guiado y acoplamiento de este segundo bulón .
(01/03/1995). Solicitante/s: GUILLEN ALFOCEA, ANTONIO.
FOCO PARA SUBMARINISTAS, CARACTERIZADO PORQUE COMPRENDE UNA CAJA ESTANCA , QUE ENCIERRA UNA BATERIA ELECTRICA, PROVISTA DE MEDIOS PARA LA FIJACION AL CUERPO DEL SUBMARINISTA Y DE LA CUAL EMERGE UN CABLE CONDUCTOR , PROVISTO DE ABRAZADERAS O MEDIOS SIMILARES PARA LA FIJACION A LO LARGO DEL CUERPO Y BRAZO DEL DEPORTISTA, Y EN EL EXTREMO UN FOCO INDEPENDIENTE DE DICHA BATERIA, DOTADO EXCLUSIVAMENTE DE UNA LAMPARA Y UN INTERRUPTOR.
VEHICULO SUBMARINO DESTINADO A TOMAR DATOS EN EL FONDO DEL OCEANO.
(16/11/1992). Solicitante/s: EUROPEAN ATOMIC ENERGY COMMUNITY (EURATOM). Inventor/es: MURRAY, CHARLES, NICHOLAS, JAMET, MICHEL ROLAND.
EL INVENTO SE REFIERE A UN VEHICULO SUBMARINO PARA LA INVESTIGACION DEL OCEANO. ESTE VEHICULO ESTA COMPUESTO POR UN PENETRADOR Y POR UNA ESTRUCTURA DE SOPORTE (2 A 7). EL VEHICULO DESCIENDE POR LA GRAVEDAD PRODUCIDA POR UN LASTRE DISPUESTO EN LA PARTE INFERIOR DEL PENETRADOR. SEPARADO DE ESTE LASTRE, EL VEHICULO PUEDE SER RECUPERADO DEBIDO AL DESACOPLAMIENTO DE UN PASADOR EXPLOSIVO . DESPUES DEL DESACOPLAMIENTO, LOS FLOTADORES SITUADOS EN LA PARTE SUPERIOR DE DICHA ESTRUCTURA DE SOPORTE SUMINISTRAN EL EMPUJE ASCENDENTE NECESARIO PARA TRANSFERIR EL VEHICULO HACIA LA SUPERFICIE DEL OCEANO. SI EL EMPUJE ES INSUFICIENTE, PUEDE DOTARSE DE UN DISPOSITIVO PIROTECNICO , QUE INFLA UNA BOLSA Y CREA UNA FLOTACION ADICIONAL DIRIGIDA HACIA ARRIBA. EL INVENTO ES PARTICULARMENTE UTIL PARA LA INVESTIGACION EN EL FONDO DEL OCEANO.
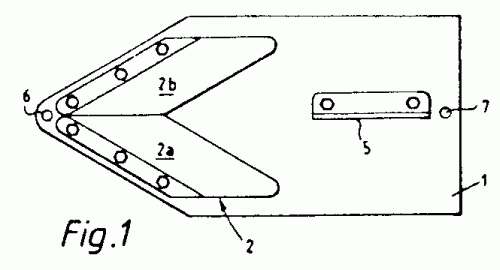
UN DEPRESOR PARA CABLES REMOLCADOS Y SIMILARES.
(16/11/1990). Ver ilustración. Solicitante/s: THE SECRETARY OF STATE FOR DEFENCE IN HER BRITANNIC MAJESTY'S GOVERNMENT OF THE UNITED KINGDOM OF GR, EAT BRITAIN AN. Inventor/es: JEPSON, GERALD FREDERIC.
UN DEPRESOR PARA CABLES REMOLCADOS Y SIMILARES. EL DEPRESOR COMPRENDE UN PLACA DE CASO , UN DEFLECTOR SUJETO A LA PLACA DE CASCO, UNA QUILLA QUE SE EXTIENDE POR DEBAJO DE LA PLACA DE CASCO, A LA CUAL ESTA SUJETA UNA ALETA ESTABILIZADORA Y UNA ALETA ESTABILIZADORA O ALETAS (8A Y 8B) QUE TIENEN UN PLANO DE COLA DE POSICION VARIABLE QUE ESTA SUJETO A LA SUPERFICIE SUPERIOR DE LA PLACA DE CASCO. EL DEPRESOR PERMITE ALTAS VELOCIDADES DE REMOLQUE, AUNQUE ES LIGERO Y POSEE BAJA RESISTENCIA AL ARRASTRE Y PUEDE SER USADO PARA MANTENER CABLES REMOLCADOS A UNA PROFUNDIDAD DETERMINADA.
DISPOSITIVO CONECTADOR DE REINTERVENCION PARA UNA HERRAMIENTA SUMERGIDA, PRINCIPALMENTE INSTALADA EN EL FONDO DEL MAR.
(16/01/1983). Solicitante/s: COMPAGNIE FRANCAISE DES PETROLES.
DISPOSITIVO CONECTADOR DE REINTERVENCION PARA UNA HERRAMIENTA SUMERGIDA, PRINCIPALMENTE INSTALADA EN EL FONDO DEL MAR. ENTRE LA HERRAMIENTA Y UN INGENIO DE MANDO MOVIL, SE HALLA DISPUESTA UNA TRANSMISION PURAMENTE MECANICA, QUE COMPRENDE, POR UNA PARTE, ACCIONADORES MECANICOS MONTADOS SOBRE UNA PARTE RECEPTORA DEL CONECTADOR SOLIDARIO DE LA HERRAMIENTA Y POR OTRA PARTE, ORGANOS MECANICOS DE MANDO , MONTADOS SOBRE UNA PARTE ACTIVA DEL CONECTADOR SOLIDARIO DEL INGENIO, ESTANDO PREVISTA VENTAJOSAMENTE UNA TRANSMISION PURAMENTE MECANICA DE ENERGIA ENTRE ESTAS DOS PARTES DEL CONECTADOR.
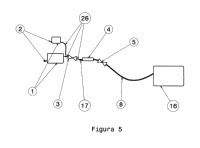
DISPOSITIVO PARA LA DETERMINACION DE LA POSICION DE UN ARTEFACTO AUTONOMO MOVIL QUE SE DESPLAZA SOBRE UNA ESTRUCTURA SUMERGIDA.
(16/05/1981). Solicitante/s: SOTRAPLEX, S.A.
DISPOSITIVO PARA LA DETERMINACION DE LA POSICION DE UN ARTEFACTO AUTONOMO MOVIL SUMERGIDO PARA LA REVISION DE LOS CASCOS DE BARCOS. CONSISTE EN UN DISPOSITIVO QUE SE PUEDE DESPLAZAR A LO LARGO DE UNA LINEA DE DESPLAZAMIENTO CON UN SISTEMA DE SERVOCONTROL (27A Y 27B) QUE DETERMINA LAS DISTANCIAS Y LONGITUDINAL ENTRE EL DISPOSTIVO SEGUIDOR Y EL ARTEFACTO AUTONOMO; ESTE SISTEMA O SERVOCONTROL INCLUYE UN TRANSDUCTOR ULTRASONORO EMISOR-RECEPTOR Y UN REFLECTOR.
{kind=link}
{kind=link}