CIP-2021 : B60W 30/00 : Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular,
p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo.
CIP-2021 › B › B60 › B60W › B60W 30/00[m] › Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B60W 30/02 · Control de la estabilidad en la conducción del vehículo.
B60W 30/04 · · destinada a la prevención de la basculación.
B60W 30/045 · · Mejora del comportamiento en el giro.
B60W 30/06 · Maniobra automática de estacionamiento.
B60W 30/08 · Anticipación o prevención de colisiones probables o inminentes.
B60W 30/085 · · Acciones automáticas para ajustar el comportamiento del vehículo en preparación del choque, p. ej. frenado para bajar el morro.
B60W 30/09 · · Acciones automáticas para evitar el choque, p. ej. frenado y giro del volante.
B60W 30/095 · · Predicción de la trayectoria o probabilidad de choque.
B60W 30/10 · Mantenimiento de la trayectoria.
B60W 30/12 · · en una vía de circulación.
B60W 30/14 · Control de crucero.
B60W 30/16 · · Control de la distancia entre vehículos, p. ej. para mantener una distancia con el vehículo que le precede.
B60W 30/165 · · · seguimiento automático de la trayectoria de un vehículo precedente, p. ej. "gancho de remolque electrónico".
B60W 30/17 · · · con provisión de acciones especiales cuando el vehículo precedente se detiene, p. ej. paro y arranque.
B60W 30/18 · Propulsión del vehículo.
B60W 30/182 · · Selección entre modos de operación diferentes, p. ej. modo de rendimiento o de confort.
B60W 30/184 · · Prevención del daño resultante de la sobrecarga o desgaste excesivo de la transmisión.
B60W 30/186 · · · desgaste excesivo o quemado de elementos de fricción, p. ej. embragues.
B60W 30/188 · · Control de parámetros de potencia de la transmisión, p. ej. determinación de la potencia requerida.
B60W 30/19 · · Mejora del cambio de marcha, p. ej. por sincronización o suavizado del desplazamiento del engranaje.
B60W 30/192 · · Reducción de problemas relacionados con la subida o bajada de potencia de la transmisión, p. ej. arranque de un motor en frío.
B60W 30/194 · · · relacionados con condiciones de baja temperatura, p. ej. alta viscosidad del fluido hidráulico.
B60W 30/20 · · Reducción de las vibraciones de la cadena de transmisión.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo programado de control para la señalización lumínica del movimiento autónomo de un vehículo automóvil, luces de señalización del movimiento autónomo de un vehículo automóvil y procedimiento para la señalización lumínica del movimiento autónomo de un vehículo.
(09/06/2017). Solicitante/s: GUADAS SANZ, Alberto Javier. Inventor/es: GUADAS SANZ,Alberto Javier.
Dispositivo programado de control para la señalización lumínica del movimiento autónomo de un vehículo, luces de señalización del movimiento autónomo de un vehículo de aplicación con el dispositivo programado descrito en esta patente, y procedimiento de señalización lumínica del movimiento autónomo de un vehículo, son, en conjunto, la forma de identificar y señalizar claramente que un vehículo circula de manera autónoma, cambia de conducción manual a conducción autónoma o viceversa, para que los demás conductores, peatones y a las fuerzas de seguridad y tráfico, sean conscientes de la misma.
PDF original: ES-2616131_A1.pdf
PDF original: ES-2616131_B1.pdf
SISTEMA PARA AYUDA EN ADELANTAMIENTOS EN CARRETERA Y MÉTODO PARA DICHO SISTEMA.
(08/02/2017). Solicitante/s: MONTOYA CAÑIZARES, Javier. Inventor/es: MONTOYA CAÑIZARES,Javier.
Sistema para ayuda en adelantamientos en carretera y método para dicho sistema, comprendiendo el sistema :
- un detector de presencia de vehículos contrarios en el carril utilizable para el adelantamiento ,
- un soporte (4, 4a) para dicho detector de presencia, dispuesto en un saliente (5, 5a) por el costado (6, 6a) del vehículo propio adyacente al carril utilizable para el adelantamiento ,
- un indicador visual y/o acústico asociado al detector, dispuesto al alcance de la vista y/u oído del conductor.
El método comprende las etapas de:
- escaneo del carril utilizable para el adelantamiento realizando lecturas sucesivas de presencia en el mismo de vehículos contrarios por medio de, al menos un detector instalado en un soporte (4, 4a) dispuesto en un saliente (5, 5a) por el costado (6, 6a) del vehículo propio , y
- muestreo y puesta a disposición del conductor de la información recogida.
PDF original: ES-2600319_B1.pdf
PDF original: ES-2600319_A1.pdf
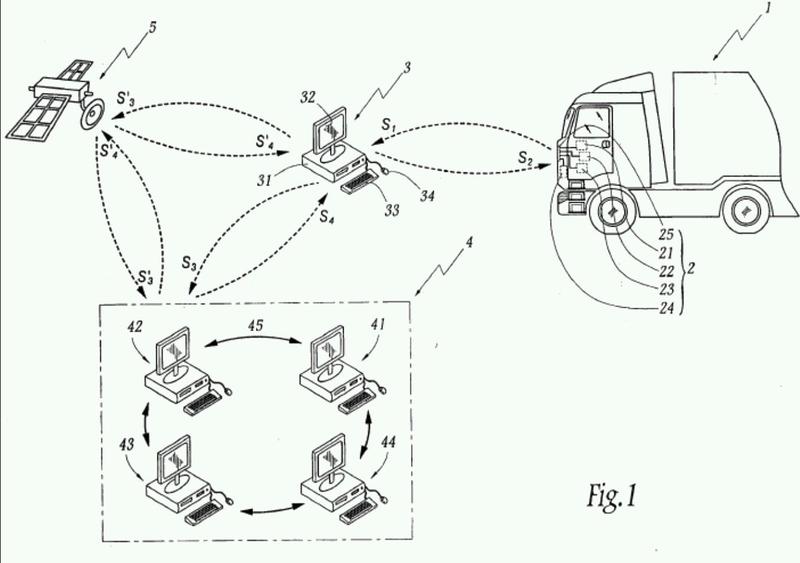
Método para ajustar parámetros de control de un dispositivo de control a bordo en un vehículo automóvil.
(10/02/2016). Ver ilustración. Solicitante/s: VOLVO LASTVAGNAR AB. Inventor/es: GIOVARESCO,FLORENT, OSTERBERG,PETER, RAULT,MATHIEU.
Un método para ajustar los parámetros de control de un dispositivo de control electrónico a bordo de un vehículo automóvil en vista de un trayecto predeterminado, caracterizado por el hecho de que comprende al menos las siguientes etapas:
a) Recoger datos con respecto al vehículo,
b) Recoger datos con respecto al trayecto predeterminado,
c) Recoger datos con respecto al menos una restricción seleccionada por un usuario que se considera que tiene prioridad para dicho trayecto predeterminado.
d) Proporcionar medios de cálculo con los datos recogidos (S3),
e) Generar con dichos medios de cálculo, un juego (D1) de parámetros de control para dicho dispositivo de control a bordo, estando dichos parámetros dedicados a dicho trayecto predeterminado y dando prioridad a dicha restricción, y
f) Cargar dicho dispositivo de control a bordo con dicho juego de parámetros de control.
PDF original: ES-2570304_T3.pdf
Procedimiento para el desacoplamiento del embrague.
(16/05/2012) Procedimiento para controlar el desacoplamiento de un embrague en un vehículo que tiene una transmisión manual automatizada que comprende un embrague controlado electrónicamente , que incluye las siguientes fases:
a1. Detección de por lo menos dos posiciones del pedal del freno separadas en el tiempo,
b1. Realización de una diferenciación de las posiciones detectadas del pedal del freno ,
c1. Comparación del valor de la diferenciación resultante con un primer valor umbral previamente determinado, y
d1. Control del embrague para que se desacople si el valor de la diferenciación representa una aplicación del pedal del freno más rápida que el primer valor umbral…
{kind=link}