CIP-2021 : B25J 9/14 : fluidos.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/14[2] › fluidos.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/14 · · fluidos.
CIP2021: Invenciones publicadas en esta sección.
Robot autónomo de pintura.
(12/03/2020). Solicitante/s: SOSA GONZÁLEZ S.L. Inventor/es: SOSA GONZALEZ,CARMELO.
1. Robot autónomo de pintura, que comprende una base móvil con un depósito de pintura y una bomba o compresor, caracterizado por que la base comprende una serie de detectores configurados para ubicar la base y para detectar obstáculos, una columna elevadora , sustancialmente vertical, en cuyo extremo se dispone un brazo robot articulado y rematado en cabezal que porta una pistola de pintura conectada a la bomba, una o más cámaras , y un detector de proximidad .
2. Robot, según la reivindicación 1, caracterizado por que la base comprende ruedas omnidireccionales.
3. Robot, según la reivindicación 1, caracterizado por que la pistola es de tipo "airless".
4. Robot, según la reivindicación 1, caracterizado por que el cabezal porta también una espátula retráctil.
5. Robot, según la reivindicación 1, caracterizado por que las cámaras del cabezal comprenden sendas fuentes de iluminación.
PDF original: ES-1243504_U.pdf
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot.
(22/05/2019) Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo un eje central (A), comprendiendo además el tubo hinchable medios de recuperación de tensión de tracción longitudinal aplicada a la envoltura por la presión interna en esta última, caracterizado por que los medios de recuperación de tensión comprenden pares de un primer y de un segundo medio de enlace inextensible que se extiende en el interior de la envoltura , estando repartidos dichos pares en N semiplanos longitudinales (P11, P12) de la envoltura , extendiéndose cada uno entre el eje central (A) de la envoltura y una línea generatriz respectiva de…
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario.
(23/11/2018) Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado al primer eslabón ; un conjunto de soporte para brazo acoplado al segundo eslabón y configurado para pivotar alrededor de un eje horizontal, en donde: el conjunto de soporte para brazo incluye un resorte configurado para generar un par de asistencia que contrarresta la gravedad; el conjunto de soporte para brazo está configurado para proporcionar el par de asistencia a un brazo de un usuario para soportar el brazo del usuario; un puño acoplado al conjunto de soporte para brazo y configurado para acoplarse al brazo del usuario, caracterizado por que
el segundo eslabón está configurado para pivotar en un plano transversal alrededor de…
PINZA DE PRENSION CON MANIOBRA POR DEPRESION.
(16/02/1999). Solicitante/s: GERPLANT AUTOMATION. Inventor/es: GERMAINE, MICHEL.
PINZA DE PRENSION PARA EL TRASPLANTE DE PLANTAS EN CEPELLON EN HORTICULTURA, QUE COMPRENDE AL MENOS DOS ELEMENTOS DE PRENSION OPUESTOS MONTADOS EN VOLADIZO SOBRE UN SOPORTE Y MEDIOS DE MANIOBRA PARA ACTUAR SOBRE LOS ELEMENTOS DE PRENSION PARA ACERCAR Y SEPARAR SUS EXTERMOS LIBRES. LOS MEDIOS DE MANIOBRA COMPRENDEN UN ACCIONADOR CON DEPRESION DISPUESTO ENTRE Y ACTUANDO DIRECTAMENTE SOBRE LOS ELEMENTOS DE PRENSION ENTRE EL EMPLAZAMIENTO DE MONTAJE DE ESTOS ULTIMOS SOBRE EL SOPORTE Y SUS EXTREMOS LIBRES, DE MANERA QUE LOS EXTREMOS LIBRES DE LOS ELEMENTOS DE PRENSION SEAN SEPARADOS POR EFECTO DE RETORNO ELASTICO (ABERTURA DE LA PINZA), Y QUE EL ACCIONADOR , CUANDO ES PUESTO BAJO DEPRESION ACTUANDO SOBRE LOS ELEMENTOS DE PRENSION EN EL SENTIDO DE UN ACERCAMIENTO DE LOS EXTREMOS LIBRES DE LOS ELEMENTOS CONTRA EL EFECTO DE RETORNO ELASTICO (CIERRE DE LA PINZA).
(16/10/1993). Solicitante/s: BARMAG AG EDELHOFF POLYTECHNIK GMBH & CO. Inventor/es: KIRCHHOFF, JOHANNES, HAHMANN, WOLFGANG, SANDKUHLER, GEORG.
APARATO DE MANEJO CON DOS ACCIONAMIENTOS HIDRAULICOS. EL PRIMER ACCIONAMIENTO ES UN CILINDRO CON PISTONES DE DOBLE EFECTO . EL ESPACIO DE CILINDRO PEQUEÑO SE IMPULSA CONTINUO CON UNA PRESION CONSTANTE POR EJEMPLO, LA PRESION DE BOMBA. LA PRESION EN EL ESPACIO DE CILINDRO GRANDE SE CONTROLA A TRAVES DE LA PRIMIERA INSTALACION DE CONTROL, CORRESPONDIENTE AL MOVIMIENTO DESEADO DEL ACCIONAMIENTO EL SEGUNDO ACCIONAMIENTO RECIBE SU ALIMENTACION DE ACEITE AL LADO DE PRESION, DESDE EL ESPACIO PEQUEÑO DE CONTROL DEL PRIMER ACCIONAMIENTO, MIENTRAS EL CUAL ESTA UNIDO CON EL ESPACION DE CILINDRO GRANDE AL LADO DE LA SALIDA, DEL PRIMER ACCIONAMIENTO. PARA EL CONTROL DEL SEGUNDO ACCIONAMIENTO ESTA UNA SEGUNDA INSTALACION DE CONTROL PREVISTO.
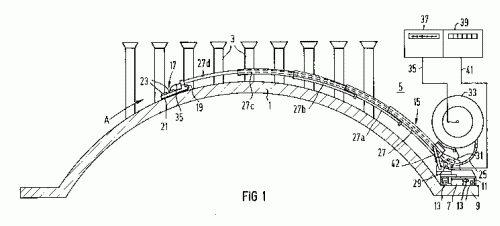
DISPOSITIVO Y PROCEDIMIENTO PARA LA VERIFICACION DE UNA PARED DE UN DEPOSITO.
(01/03/1992). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: KRAUSS, PETER, BAUER, RAINER, GUGEL, GEORG, HAEFNER, MARTIN.
DISPOSITIVO Y PROCEDIMIENTO PARA LA VERIFICACION DE UNA PARED DE UN DEPOSITO, ESPECIALMENTE DE LA TAPA DE UN DEPOSITO A PRESION DE REACTOR. SE PROPONE UN PROCEDIMIENTO CON UN DISPOSITIVO , EN EL QUE EN UN CARRO MOVIL SOBRE UN CARRIL DE TRASLACION ESTA ARTICULADO UN BRAZO TELESCOPICO MOVIL CON UN APARATO DE PRUEBA , ESTANDO CONFIGURADOS LOS MIEMBROS (27, 27A, 27B, 27C, 27D) DEL BRAZO TELESCOPICO EN FORMA DE ARCO Y TENIENDO UNA SECCION TRANSVERSAL EN FORMA DE U. EL BRAZO TELESCOPICO SE EXTIENDE Y RETRAE POR MEDIO DE UNA MANGUERA DE EMPUJE RESISTENTE A LA TRACCION Y RIGIDA A LA PRESION.
MAQUINA ARRANCADORA DE ARBOLES DE VIVERO.
(16/10/1991). Ver ilustración. Solicitante/s: BOLADERES MONTAÑES, CANDIDA.
MAQUINA ARRANCADORA DE ARBOLES DE VIVERO DOTADA DE UNA BASE CON PATAS DE APUNTALAMIENTO REPLEGABLES SOBRE LA QUE GIRA UNA VIGA VERTICAL EN CUYO EXTREMO SE ARTICULA UN BRAZO OSCILANTE ACTIVADO POR UN PISTON Y UN RESORTE DE RETORNO EN CUYA PUNTA SE UBICAN DOS GANCHOS (3 Y 4) DE LOS QUE CUELGA UNA PINZA DOTADA DE MORDAZAS VERTICALES DE LAS QUE PERPENDICULARMENTE SURGEN DOS BRAZOS HORIZONTALES EN LOS QUE SE ENGARZAN UNA CADENA SUSTENTADORA, ACTIVANDOSE LA APERTURA Y CIERRE DE ESTA PINZA MEDIANTE UN SEGUNDO PISTON HIDRAULICO QUE COMO EL PRIMERO ES REGIDO POR SU CORRESPONDIENTE PALANCA DE ACCIONAMIENTO SITUADA EN UN DISTRIBUIDOR HIDRAULICO.
JUNTA MULTIDIRECCIONAL CERRADA POR MANIPULADOR.
(01/03/1991). Solicitante/s: ETUDES TECHNIQUES-FRANCHE COMTE-ALSACE ETFA SARL. Inventor/es: BAILLS, JEAN-MICHEL, CRETIEN, GEORGE.
EL PRESENTE INVENTO ES RELATIVO A UN DISPOSITIVO DE PUESTA EN REFERENCIA POR ELEMENTOS DE APREHENSION DESTINADOS EN LA MANUTENCION, Y DE SEGURIDAD MULTIDIRECCIONAL, MONTADO ENTRE EL BRAZO DE UN MANIPULADOR O ROBOT, U OTRO DISPOSITIVO DE MANUTENCION, Y LA PINZA , U OTRO MEDIO DE APREHENSION, CARACTERIZADO EN QUE ESTA LIBRE ESPACIALMENTE Y CERRADOM Y EN QUE EL MEDIO DE UNION ESTA VENTAJOSAMENTE CONSTITUIDO POR TRES GATOS MONTADOS EN ARTICULACION AL MEDIO DE ROTULAS , POR LA CHAPA DEL CILINDRO EN LA PLACA DEL BRAZO , Y POR LA CHAPA DEL PISTON A LA PLACA DE LA PINZA , Y EL MEDIO DE APERTURA DE SEGURIDAD ESTA CONSTITUIDO POR UN PAR DE CAPTADORES DE POSICION O FIN DE CURSO (10 Y 11) QUE DETECTOR RESPECTIVAMENTE LAS POSICIONES BAJA Y ALTA DEL PISTON DE LOS GATOS. CADA GATO ESTA PROVISTA DE UN PAR DE CAPTADORES DE POSICION O DE FIN DE CURSO (10 Y 11).
PERFECCIONAMIENTOS INTRODUCIDOS EN UN DISPOSITIVO DE FRENADO.
(01/11/1984). Solicitante/s: BRIAN PIGOTT,NORMAN.
DISPOSITIVO DE FRENADO PARA UN BRAZO MOVIL.CONSTA DE UNA SUPERFICIE CILINDRICA ALREDEDOR DE LA CUAL ESTA AJUSTADO UN ELEMENTO EXPANSIBLE AL CUAL PUEDE ALIMENTARSE ACEITE A TRAVES DE UNA LINEA DE FLUIDO , QUE PASA A TRAVES DEL BASTIDOR Y DE UN ANILLO , EL CUAL FORMA UN SOPORTE ANULAR PARA EL MANGUITO . EL ACEITE SE ALIMENTA BAJO ALTA PRESION Y EL AIRE MEDIANTE UNA LINEA ,.DESDE UNA VAVULA DE CONTROL.
UNA INSTALACION ELECTRO-HIDRAULICA DE CONTROL PARA DISPOSITIVO DE AUTOMATA.
(01/05/1983). Solicitante/s: COPPERWELD ROBOTICS, INC.
INSTALACION ELECTRO-HIDRAULICA DE CONTROL, DESTINADA Y ADECUADA PRINCIPALMENTE PARA USO EN DISPOSITIVOS DE AUTOMATA O DE ROBOT DEL TIPO QUE TIENEN UNO O VARIOS MIEMBROS ACCIONADORES DE TRABAJO. CONSTA DE UNA PLURALIDAD DE ACTIVADORES HIDRAULICOS QUE FUNCIONAN INDIVIDUALMENTE EN EL SENTIDO DE TRANSMITIR DIFERENTES MOVIMIENTOS PREFIJADOS A LOS MEDIOS ACCIONADORES DE TRABAJO; DE UN MOTOR ELECTRICO REVERSIBLE DE PROPULSION ; DE UN CILINDRO DE POTENCIA NORMALMENTE LLENO DE FLUIDO HIDRAULICO; DE UN EMBOLO MONTADO CON MOVIMIENTO DE VAIVEN EN DICHO CILINDRO , QUE DEFINA UNAS CAMARAS DE PRESION INDIVIDUALES EN LADOS OPUESTOS DEL MISMO; Y DE UN SISTEMA HIDRAULICO DE CIRCUITO CERRADO, A TRAVES DEL CUAL PASA EL LIQUIDO HIDRAULICO DE UNO A OTRO DE LOS ACTIVADORES HIDRAULICOS.
PERFECCIONAMIENTOS EN LOS APARATOS DE INTERVENCION SOBRE ESTRUCTURAS SUMERGIDAS GOBERNABLES A DISTANCIA.
(01/12/1981). Solicitante/s: COFLEXIP.
APARATO DE INTERVENCION SOBRE ESTRUCTURAS SUMERGIDAS A DISTANCIA. EL APARATO CONSTA DE UN SOPORTE DE NAVEGACION DE SUPERFICIE UNIDO UMBILICALMENTE A UNVEHICULO MOVIL SOBRE EL FONDO SUBMARINO CON UN BASTIDOR SOBRE CUATRO ORUGAS INDEPENDIENTES Y DOS MONTANTES , CON SENDOS BRAZOS MANIPULADORES UNIDOS POR UNAS ARTICULACIONES CON VARIOS GRADOS DE LIBERTAD. EN LOS BRAZOS HAY UNAS PINZAS QUE SUJETAN EL CONDUCTEIE POR EL EXTREMO CERCANO AL CONECTADOR AUTOMATICO ; LAS PINZAS, AL CERRARSE POR UN GATO SOBRE UN COLLAR DEL CONDUCTO, ACCIONA UNAS VALVULAS QUE PONEN EN MARCHA EL CONECTADOR AUTOMATICO. EL VEHICULO COMPRENDE ADEMAS UN SISTEMA DE NAVEGACION Y UNA CAMARA DE TELEVISION SITUADOS EN DIFERENTES PUNTOS PARA VISUALIZAR LA OPERACION. DE USO PARA LA CONEXION DE CONDUCTOS TUBULARES FLEXIBLES SOBRE O EN LA PROXIMIDAD DEL FONDO SUBMARINO.
{kind=link}
{kind=link}