CIP-2021 : B63G 8/00 : Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13;
cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
CIP-2021 › B › B63 › B63G › B63G 8/00[m] › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B63G 8/04 · Superestructuras.
B63G 8/06 · · Puesto de órdenes de maniobra, torres de mando.
B63G 8/08 · Propulsión (propulsión nuclear B63H 21/18; dispositivos de escape bajo el agua F01N 13/12; instalaciones o conjuntos de propulsión en sí , ver las clases correspondientes).
B63G 8/10 · · utilizando una máquina de vapor.
B63G 8/12 · · utilizando motores de combustión interna.
B63G 8/14 · Control de la posición o de la profundidad (para torpedos F42B 19/00).
B63G 8/16 · · por empleo directo de hélices o de sistemas a reacción.
B63G 8/18 · · por hidroaviones.
B63G 8/20 · · Equipo de gobierno (B63G 8/16, B63G 8/18 tienen prioridad; gobierno de los buques en general B63H 25/00).
B63G 8/22 · · Regulación de la flotabilidad por lastre de agua; Equipo de vaciado de los tanques de lastre (estabilización de buques por empleo de tanques de lastre B63B 43/06).
B63G 8/24 · · Regulación automática de la profundidad; Dispositivo de seguridad para aumentar la flotabilidad, p. ej. lastre separable, cuerpos flotantes.
B63G 8/26 · · Dispositivos de regulación de la estiba.
B63G 8/28 · Disposición de instalaciones ofensivas o defensivas.
B63G 8/30 · · de artillería o de medios de lanzamientos de misiles.
B63G 8/32 · · de medios de lanzamiento de torpedos (medios de lanzamiento de torpedos en sí F41F 3/00 ); de almacenamiento de torpedos o de su mantenimiento.
B63G 8/33 · · medios de colocación de minas (buques para colocar minas distintos que los submarinos B63G 6/00).
B63G 8/34 · · Enmascaramiento o camuflaje (para otros buques B63G 13/02; en general F41H 3/00).
B63G 8/36 · Adaptaciones relativas a las instalaciones de ventilación, refrigeración, calefacción o acondicionamiento de aire (reacondicionamiento del aire en cámaras estancas A62B 11/00; para buques en general B63J 2/00; acondicionamiento de aire en general F24F).
B63G 8/38 · Disposición de instrumentos de vigilancia óptica o electrónica, p. ej. periscopios o radar.
B63G 8/39 · Disposición de instrumentos de vigilancia sónica, p. ej. baja frecuencia, sonar.
B63G 8/40 · Equipos de rescate para el personal (salvamento en la mar, no adaptado especialmente para el personal de submarinos B63C).
B63G 8/41 · · Cápsulas, cámaras, barcos estancos o equipo análogo, destacable de un submarino.
B63G 8/42 · Embarcaciones submarinas remolcadas.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES.
(16/07/2020). Solicitante/s: UNIVERSIDAD SIMÓN BOLIVAR. Inventor/es: ABRIL HOWARD,Omar Santiago, VILLAREAL GONZALEZ,Reynaldo Farid, PESTANA NOBLES,Juan Pablo, OCHOA PERTUZ,Carlos Andres, RODRIGUEZ,Eugenio Yime.
La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos sumergidos; específicamente relacionado con un equipo para permanecer bajo el agua, los medios para buscar objetos sumergidos con cámaras de buceo unidas mecánicamente a una base de tipo cerrado con control independiente de propulsión y de dirección que consiste en un submarino tipo Vehículo Operado Remotamente (ROV - Remote Operated Vehicle) con seis motores: cuatro motores con empuje en el eje horizontal y dos motores con empuje el eje vertical; donde los motores de empuje horizontal cuentan giran sobre un eje en un ángulo de 0 a 45 grados y donde los motores están ubicados en una estructura adicional que permite el giro y bloqueo de los motores según el ecosistema o las condiciones ambientales a las cuales el Vehículo Operado Remotamente va a ser expuesto).
Método para instalar un cable submarino.
(17/06/2020). Solicitante/s: FUNDACION TECNALIA RESEARCH & INNOVATION. Inventor/es: VILLATE MARTINEZ, JOSE LUIS, RICO RUBIO,Antonio, DEL POZO MARTIN,Alberto, BERQUE,Joannes, SELLNER,Jan.
Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método:
suministrar alimentación eléctrica y/o transmitir datos a través del cable submarino al aparato sumergible ; y
tender el cable submarino en un mar con el aparato sumergible.
PDF original: ES-2819423_T3.pdf
Un dispositivo de limpieza de superficie.
(17/06/2020). Solicitante/s: HullWiper Limited. Inventor/es: ANDERSEN,ROBERT.
Un dispositivo para limpiar superficies sumergidas en agua, que comprende un miembro de disco soportado de manera giratoria por un huso y configurado para girar alrededor de un eje rotatorio (r) mediante medios de accionamiento; teniendo dicho miembro de disco un primer lado (80a) que mira hacia dicha superficie cuando el dispositivo está en uso, y un segundo lado (80b) que mira hacia afuera de la superficie, y donde el miembro de disco comprende además una pluralidad de boquillas para descargar líquido bajo presión contra la superficie a limpiar; estando dichas boquillas conectadas de manera fluida a un depósito de líquido a través de un primer conducto en el miembro de disco y un segundo conducto en el huso , caracterizado porque
el miembro de disco comprende una pluralidad de agujeros pasantes, espaciados a intervalos regulares y dispuestos simétricamente con respecto al eje rotatorio.
PDF original: ES-2814648_T3.pdf
Comunicaciones entre robots móviles de medio acuático.
(06/05/2020) Un sistema robótico de medio acuático, que comprende:
- una estación de control ;
- un robot submarino que tiene un cuerpo, una pluralidad de patas que se enganchan al cuerpo, propulsores para el movimiento submarino del cuerpo, un módulo de movimiento submarino para controlar los propulsores y un módulo de deslizamiento para controlar las patas a lo largo del fondo marino;
- un robot de superficie del agua ;
- primer y segundo módulo de comunicación asociados con el robot submarino y el robot de superficie del agua , respectivamente, en donde el primer y segundo módulo de comunicación proporcionan comunicación entre los robots a través del agua;
- tercer y cuarto módulo de comunicación…
Conjunto de batería para submarino.
(15/04/2020). Solicitante/s: NAVAL GROUP. Inventor/es: GARANS,CYRILLE.
Conjunto de batería para submarino que incluye al menos un ensamblaje mecánico y eléctrico de ramas , incluyendo cada rama al menos un módulo de acumuladores conectados eléctricamente, caracterizado porque cada rama tiene una forma geométrica tridimensional que incluye dos caras paralelas y opuestas trapezoidales, y porque dicho ensamblaje de ramas está formado por una pila en abanico de ramas , que forman una sección de perfil sustancialmente semicircular.
PDF original: ES-2788057_T3.pdf
Vehículo de inspección in-situ de transformador con un casco de jaula.
(25/03/2020) Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo de lastre ; y;
una jaula que lleva dicho al menos un dispositivo de empuje y dicho al menos un dispositivo de lastre , comprendiendo dicha jaula una pluralidad de barras , que incluyen al menos una barra orientada en una primera orientación y al menos una barra orientada en una segunda orientación, cada una de dichas barras proporciona una abertura en donde dichas aberturas forman una cavidad de jaula para transportar dicho al menos un dispositivo de empuje y dicho al menos un dispositivo de lastre , cada una de dichas barras está formada…
Dispositivo de elevación para un submarino.
(08/01/2020) Dispositivo de elevación para un submarino para transportar una carga útil a lo largo de una dirección de elevación, caracterizado porque el dispositivo de elevación comprende un primer elemento de guiado , un segundo elemento de guiado (20'), un primer elemento de elevación y un segundo elemento de elevación (40'), en donde el primer elemento de elevación está apoyado sobre el primer elemento de guiado de forma que puede desplazarse a lo largo de la dirección de elevación,
en donde
- el primer elemento de elevación y el primer elemento de guiado están acoplados entre sí a través de un medio de fuerza que actúa en la dirección de elevación, y
- el segundo elemento de elevación (40') y el segundo elemento de guiado (20') están acoplados entre sí a través de un medio de fuerza adicional que actúa…
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO.
(12/12/2019). Solicitante/s: MIRANDA AGÜERO, Manuel. Inventor/es: MIRANDA AGÜERO,Manuel.
La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende al menos un vehículo acuático tripulado, al menos un sistema de bombeo hidráulico, al menos una unidad compresora de gas, al menos un generador de nano-burbuja, una pluralidad de mangueras hidráulicas y al menos una manguera de gas comprimido, donde dicho conjunto comprende además al menos dos tanques, al menos un sistema de bombeo hidráulico reciprocante y al menos un vehículo operado remotamente o ROV (Remotely Operated Vehicle) sumergido en el espacio acuático, y que comprende una pluralidad de hélices y orugas, y tiene flotabilidad neutra.
Dispositivo de amarre para un vehículo submarino, sistema de amarre y base de recuperación.
(11/12/2019). Solicitante/s: NAVAL GROUP. Inventor/es: PIGANEAU,NICOLAS HENRI MARIE.
Dispositivo de amarre para un vehículo submarino provisto de un dispositivo de enganche , comprendiendo el dispositivo de amarre un cuerpo hueco alveolado adecuado para cooperar con el dispositivo de enganche del vehículo submarino, estando provisto el cuerpo hueco de una superficie exterior alveolada que está dirigida hacia una pluralidad de direcciones, caracterizado porque comprende al menos un plano de resistencia (24a, 24b, 24c, 24d, 24e, 24f, 24g, 24h, 24i) adecuado para crear inercia durante un impacto del vehículo submarino procedente de cada una de la pluralidad de direcciones o de una dirección cercana a ellas, estando los planos de resistencia (24a, 24b, 24c, 24d, 24e, 24f, 24g, 24h, 24i) dispuestos en el interior del cuerpo hueco.
PDF original: ES-2765180_T3.pdf
(06/11/2019). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: BARGMANN,JÖRN.
Submarino con un contenedor , que puede obturarse por un lado y hacia el exterior mediante una tapa que cierra de forma estanca a la presión, que está articulada de forma basculante y que está configurada abombada convexamente hacia fuera, con unos medios para inundar el contenedor cerrado bajo el agua y con unos medios para recoger y almacenar el gas o la mezcla gaseosa desplazados desde el contenedor durante la inundación, y con una trampa de gas prevista en la tapa , que recoge y almacena el gas o la mezcla gaseosa situados en la tapa al abrirse la tapa , caracterizado porque la trampa de gas está formada por una cavidad configurada en el lado interior de la tapa y abierta solamente hacia el lado de articulación de la tapa.
PDF original: ES-2770650_T3.pdf
SISTEMA SUBACUÁTICO PARA LABORES DE ACUICULTURA.
(06/11/2019). Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID. Inventor/es: SALTAREN PAZMIÑO,Roque Jacinto, RODRÍGUEZ BARROSO,Alejandro, CELY GUTIERREZ,Juan Sebastian, PORTILLA TUESTA,Gerardo Alejandro, YAKRANGI,Oz.
La presente invención se refiere a un sistema subacuático para labores de acuicultura que comprende una colonia de robots que comprenden: un robot nodriza con medios para flotar sobre el agua, medios para desplazarse por la superficie del agua, un módulo de control y un cable umbilical para comunicaciones y transmisión de energía; un robot maestro conectado al robot nodriza por medio del cable umbilical, que comprende unos medios de desplazamiento, para desplazarse bajo la superficie agua, y un segundo cable umbilical; y un robot esclavo conectado al robot maestro por el segundo cable umbilical, que comprende unos medios de desplazamiento, para desplazarse bajo la superficie del agua, y una garra de tipo pinza, configurada para realizar una manipulación 3D subacuática de las labores de acuicultura.
PDF original: ES-2729816_A1.pdf
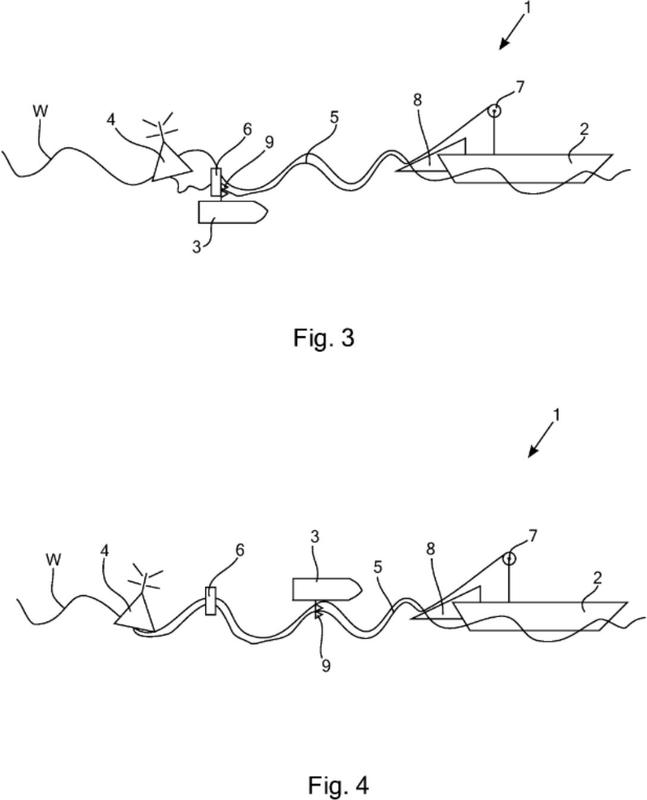
Sistema de vehículos con un buque nodriza y una embarcación no tripulada, y procedimiento para recuperar una embarcación no tripulada.
(25/09/2019). Ver ilustración. Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: TREYDE,HINNERK.
Sistema de vehículos con un buque nodriza y una embarcación no tripulada , que puede alojarse en el buque nodriza , en donde para recuperar la embarcación no tripulada mediante el buque nodriza puede dejarse en el agua un cuerpo flotante unido al buque nodriza a través de un cabo , en donde en la embarcación no tripulada está dispuesto un dispositivo de retenida para enganchar el cabo ,
caracterizado porque en la zona del cabo que está dirigida hacia el cuerpo flotante está dispuesto un separador , el cual impide que el cuerpo flotante haga contacto con la embarcación no tripulada.
PDF original: ES-2763105_T3.pdf
Conjunto de losetas para modificar la capa límite.
(18/09/2019) Conjunto de losetas que, en uso, se monta en una estructura de base para formar al menos parte de una superficie lavada con un fluido que tiene un flujo de fluido sobre la misma, por lo que el conjunto de losetas comprende:
un alojamiento provisto de una fijación mecánica para cooperar con una fijación complementaria en la estructura de base para de ese modo bloquear el conjunto de losetas en la estructura de base ;
al menos una cámara de admisión prevista dentro del alojamiento ;
una pared del alojamiento provista de una pluralidad de pasos de flujo que se extienden desde el lado de la cámara de admisión de la pared hasta una superficie exterior de la pared proporcionando dicha al menos parte de…
Vehículo submarino, procedimiento para recibir una carga procedente del fondo marino y procedimiento para depositar una carga sobre el fondo marino.
(04/09/2019). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: BRANDT,HENDRIK, PANOCH,AXEL.
Vehículo submarino con una zona de acumulación para acumular unas cargas , en donde el vehículo submarino presenta un casco de presión y un casco de presión adicional, caracterizado porque la zona de acumulación está dispuesta por fuera del casco de presión y entre el casco de presión y el casco de presión adicional, en donde el vehículo submarino está configurado para recibir la carga procedente del fondo marino y/o depositar la carga sobre el fondo marino, en donde el vehículo submarino presenta un sistema de transporte de cargas para recibir la carga procedente del fondo marino, para depositar la carga sobre el fondo marino y para transportar la carga dentro de la zona de acumulación.
PDF original: ES-2757625_T3.pdf
Vehículo subacuático teledirigido para la succión de petróleo en la parte inferior de una superficie de hielo.
(21/08/2019) Vehículo subacuático teledirigido para la succión de petróleo de la parte inferior de una cubierta de hielo cerrada, en donde el vehículo subacuático teledirigido presenta medios de accionamiento, en donde el vehículo subacuático teledirigido presenta al menos una bomba , en donde la bomba está configurada para la succión de fluido, en donde el vehículo subacuático teledirigido presenta al menos un medio para localizar petróleo , en donde el vehículo subacuático teledirigido presenta un medio de conexión con un vehículo principal, en donde el medio de conexión presenta al menos una primera conexión para la comunicación, una segunda conexión para el suministro de energía al vehículo subacuático teledirigido y una tercera…
(13/03/2019). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: NOWOISKY,ADRIAN, PANTKE,MARCEL.
Submarino, a cuyo casco está fijado de manera separable por medio de un pestillo , por el lado exterior, en una zona por debajo de una cubierta superior , al menos un dispositivo de transporte , caracterizado por que el pestillo está unido operativamente a un medio de accionamiento a través de un árbol cardán y un mecanismo de palanca acodada, al que está antepuesto un engranaje helicoidal y que puede controlarse manualmente desde la cubierta superior del submarino, estando unido un tornillo sin fin del engranaje helicoidal , de manera móvil giratoria, al árbol cardán.
PDF original: ES-2723182_T3.pdf
Un dispositivo y vehículo de limpieza de superficie.
(22/02/2019) Un vehículo submarino operado de manera remota para transportar dispositivos de limpieza para la limpieza de superficies sumergidas en agua.
teniendo el vehículo submarino
un eje (x) de balanceo, un eje (y) de cabeceo y un eje (z) de guiñada,
todos de dichos ejes que intersecan el centro de gravedad del vehículo (CG);
caracterizado porque
el vehículo submarino comprende un primer lado (5a), un segundo lado (5b), medios de propulsión, al menos un par de medios (10a,b; 12a,b) de compensación, un primer medio de flotabilidad unido al primer lado (5a) y un segundo medio de flotabilidad unido…
Submarino y procedimiento para abrir una escotilla de submarino limitada por un hueco.
(20/02/2019). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: STOLTENBERG,BURKHARD, DR. MALLETSCHEK,ANDREAS, SCHAAKE,FELIX.
Submarino con una escotilla delimitada por un hueco , en el que la escotilla en un estado cerrado está cerrada con una cuaderna de inserción dispuesta en el hueco y una cuña , en donde para una apertura de la escotilla la cuaderna de inserción y la cuña pueden retirarse por separado del hueco.
PDF original: ES-2701097_T3.pdf
Sistema de cable de fibra óptica para vehículos subacuáticos telemaniobrados.
(20/02/2019). Solicitante/s: Bluefin Robotics Corporation. Inventor/es: HAWKES,GRAHAM, CHIAU,CHARLES S, WRIGHT,ADAM.
Un aparato que comprende:
un carrete para almacenar una fibra óptica ;
un motor para hacer girar el carrete y
un transductor de velocidad para detectar una velocidad de movimiento del aparato a través del agua; caracterizado porque el aparato comprende además un controlador acoplado al motor para controlar la retirada de la fibra óptica del carrete a una velocidad igual o mayor que la velocidad de movimiento detectada del aparato a través del agua.
PDF original: ES-2726800_T3.pdf
(09/01/2019) Un dispositivo de oruga que comprende:
una parte de eliminación de película de agua que se proporciona en un miembro (C) de transmisión de potencia que incluye cadenas, presiona y elimina una película de agua entre un objeto de conexión como un material magnético y el miembro (C) de transmisión de energía con una fuerza magnética, y une el miembro de transmisión de potencia al objeto de conexión para asegurar una fuerza de fricción;
caracterizado porque
se proporciona una parte de conexión de imán en cuerpo de aparato que está conectada al miembro (C) de transmisión de potencia y une el cuerpo del aparato al objeto de conexión, y
en el que la parte de eliminación de película de agua incluye:
…
EMBARCACION VELERO DE RECREO SUMERGIBLE PARCIALMENTE.
(04/12/2018) 1. Embarcación velero de recreo sumergible parcialmente caracterizada porque comprende:
- Un casco de la embarcación provisto de dos pontones flotantes a modo de catamarán.
- Una cabina de control desplazable verticalmente con relación al casco de la embarcación y dispuesta en el espacio comprendido entre los dos pontones flotantes, donde gracias a que es desplazable verticalmente respecto de los pontones flotantes se puede disponer por encima del nivel del mar o por debajo de nivel de mar o cualquier posición intermedia y donde la cabina de control está provista de unos conductos de ventilación.
- unos cilindros hidráulicos desplegables de manera telescópica y unidos a los pontones del casco y accionado desde unos mandos provistos en la cabina de control.
- unos brazos de unión montados en la cabina y unidos…
(20/11/2018). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: KRUGER,GEORG.
Submarino, en el que está previsto en el lado exterior del buque al menos un dispositivo para la recepción y el alojamiento de un dron submarino , caracterizado por que el dispositivo presenta un transmisor de senda de planeo para la transmisión de una señal de guía y el transmisor de senda de planeo emite una señal de guía acústica agrupada.
PDF original: ES-2690299_T3.pdf
(09/10/2018). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: HEINZ, STEFAN, MATTHIESEN,HANS PETER.
Submarino con una instalación de comunicaciones , que presenta varios equipos de emisión y/o de recepción , configurados para el funcionamiento en distintos intervalos de frecuencia para transmitir señales de transmisión de información hacia fuera del submarino y para recibir señales de transmisión de información desde fuera del submarino, y un control para la gestión energética de la instalación de comunicaciones , caracterizado por que uno o varios componentes de los equipos de emisión y/o de recepción pueden conectarse y desconectarse independientemente mediante el control a causa de uno o varios de los siguientes estados:
a) posición de la antena
b) estado de funcionamiento de mástiles retráctiles
c) profundidad de inmersión del submarino.
PDF original: ES-2685547_T3.pdf
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN.
(04/10/2018). Solicitante/s: FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO. Inventor/es: VASQUEZ MIRANDA,Leonardo, ALVAREZ ROMERO,Fernando Alberto, PULIDO MARIN,Alexander.
Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de acero, que registra de manera autónoma imágenes y video del relieve marino optimizando el trabajo de los biólogos marinos ya que controla el desplazamiento, utilizando cámaras que controlan el enfoque, desplazamiento, estabilidad y permiten una captura en secuencia de todo el trayecto lo mismo que la grabación de video. Disminuye la cantidad de buzos, el tiempo requerido en la inmersión y el riesgo existente al hacer el registro, por lo tanto, ahorra costos, mejora la calidad del material recopilado, optimizando el procedimiento.
Parte de revestimiento exterior para un submarino.
(03/10/2018). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: Thelen,Thorsten, HEINZE,BODO.
Parte de revestimiento exterior para un submarino, estando hecha la parte de revestimiento exterior de un material compuesto reforzado con fibras, caracterizada por que a la parte de revestimiento exterior puede fijarse de manera desmontable al menos un alojamiento para un elemento de fijación atravesado por una abertura configurada en el parte de revestimiento exterior.
PDF original: ES-2684576_T3.pdf
CONJUNTO DE ESCANEO POR LÁSER, VEHÍCULO Y PROCEDIMIENTO DE ESCANEO POR LÁSER CORRESPONDIENTES.
(27/09/2018). Solicitante/s: UNIVERSITAT DE GIRONA. Inventor/es: PALOMER VILA,Albert, RIBAS ROMAGÒS,David, RIDAO RODRÍGUEZ,Pere, FOREST COLLADO,Josep.
Conjunto de escaneo por láser, vehículo y procedimiento de escaneo por láser correspondientes. La invención obtiene una caracterización geométrica de la forma de una superficie a partir del principio de triangulación. El conjunto comprende: un emisor de luz láser, unos medios de difracción que transforman la luz láser en una configuración de abanico plano, unos medios de redireccionamiento que redirigen el haz y lo proyectan sobre la superficie , un receptor de luz que capta un área de escaneo que incluye el abanico y unos medios de control que controlan todos estos elementos. El receptor presenta unos medios de procesamiento propios para detectar los puntos iluminados en la imagen captada. Los medios de redireccionamiento están montados rotativos alrededor de al menos un eje fijo. El giro de los primeros medios de redireccionamiento está controlado por dichos medios de control de forma sincronizada con el resto de elementos.
Cuerpo de cierre para cerrar una abertura en un vehículo acuático.
(26/09/2018). Solicitante/s: ThyssenKrupp Marine Systems GmbH. Inventor/es: PAUL,AXEL DIPL.-ING.
Cuerpo de cierre para cerrar un mamparo o una escotilla de un vehículo acuático, que está formado por un material compuesto de fibras, caracterizado porque las fibras en una zona de borde exterior del cuerpo de cierre están orientadas de manera unidireccional en dirección hacia la circunferencia exterior del cuerpo de cierre.
PDF original: ES-2683358_T3.pdf
SISTEMA IMPULSOR Y GENERADOR DE ENERGÍA ELÉCTRICA PARA UNSUBMARINO.
(19/09/2018) 1. Sistema impulsor y generador de energía eléctrica para un submarino, caracterizado porque:
- comprende unas turbinas , unos moto-generadores eléctricos y una batería ;
- las turbinas y los moto-generadores eléctricos están ubicados en correspondencia con unos ejes comunes ; donde las turbinas son solidarias a los ejes comunes ; y
donde las turbinas están configuradas para que durante el descenso y ascenso del submarino dentro de un fluido líquido, unos flujos de caudal ascendente y unos flujos de caudal descendente del fluido líquido pasen a través de unas secciones de paso en las que se encuentran las turbinas impulsando los giros de dichas turbinas que transmiten sus giros a los moto-generadores…
(17/09/2018). Solicitante/s: SERRA VERDAGUER, Jaime. Inventor/es: SERRA VERDAGUER,Jaime.
Submarino de recreo consistente en un navío sumergible compuesto por una esfera central con anillo y alas envolventes solidarizadas ambas partes mediante cerrojos con comunicación inalámbrica por infrarrojos o radiofrecuencia.
La esfera central, concéntrica con el anillo, funciona como cojinete de bolas esférico. Siempre flota manteniendo su suelo horizontal. Aloja a pasajeros, medios auxiliares y baterías teniendo ancla y snorkel. Las alas tienen cuatro tanques principales y cuatro secundarios, dos motores con eje rotórico para hélice o turbina y eje de bloque motor solidario con el estator mediante pivote hueco que aloja cables de energía. Las alas, con sistema de regulación de lastre, alojan, también, baterías, bombas de trasvase, dispositivos de control y toberas de propulsión, protegidas por rejillas. Las alas flotan siempre con tanques vacíos y se sumergen cuando están llenos.
Velocidad hasta 10 nudos. Capacidad de 1 a 8 pax según tamaño.
PDF original: ES-2681922_A1.pdf
(12/06/2018). Solicitante/s: NAVARRETE PORTA, Fernando. Inventor/es: NAVARRETE PORTA,Fernando, CAFFARENA DE LA FUENTE,Maria.
Vehículo submarino que comprende una cabina esférica de material transparente, desmontable en dos casquetes (2a, 2b) semiesféricos, a la que se acopla, en una estructura de soporte también desmontable, un sistema de inmersión con flotadores y lingotes de contrapeso todo desmontable. La cabina , de tamaño variable, está compuesta por un casquete inferior(2a) y otro superior (2b) con un anillo rígido que cierra ambas partes y permite su apertura, desde el exterior o interior, para entrada y salida de tripulantes. En la cabina hay asiento para uno o más tripulantes y botellas de aire para respirar los tripulantes dentro de ella y escapar en caso de emergencia. En la parte inferior de la cabina una perforación da paso estanco a cables y tiene una válvula de accionamiento mecánico desde el interior, para acceso controlado de agua.
PDF original: ES-2672152_A1.pdf
VEHICULO SUBMARINO NO TRIPULADO PARA INSPECCION DE EMISARIOS.
(29/05/2018). Solicitante/s: Seys MedioAmbiente, S.L. Inventor/es: DEL CASTILLO IGAREDA,Jesús Antonio, DEL CASTILLO IGAREDA,José Ángel.
1. Vehículo submarino no tripulado (ROV) para inspección de emisarios caracterizado por estar constituido por los siguientes elementos.
Un vehículo submarino no tripulado en cuyo interior cuenta con:
- un potente motor eléctrico,
- una batería de suministro de corriente a todos los elementos y
- una batería de respeto para el caso de fallo de la principal,
- un dispositivo de geo-posicionamiento,
- una C.P.U. de control de recepción de órdenes de velocidad y dirección, de recogida de datos y emisión de los mismos.
Y en su parte exterior cuenta con:
- una tobera de propulsión,
- un timón de dirección,
- un timón de profundidad,
- un foco led de gran potencia,
- una cámara de alta resolución,
- una antena de recepción - emisión de datos,
- un sensor de salinidad,
- un sensor de pH,
- un sensor de conductividad,
- un sensor de temperatura,
- un sensor de DBO5,
- un sensor de DQO.
PDF original: ES-1213285_U.pdf
Refugio seco para incrementar la capacidad operativa de un submarino.
(02/05/2018) Un refugio seco instalable sobre la superficie exterior de un submarino, siendo un sistema auto-contenido y que comprende:
a) un compartimento estanco ;
b) una cámara operacional , dispuesta en el interior de dicho compartimento estanco , que comprende una primera vía de acceso al exterior , para desplegar/recuperar al/desde el exterior a través de dicha primera vía de acceso al exterior , un medio operacional, cuando el submarino está sumergido;
c) un tanque de compenso para el almacenamiento de agua de un volumen ligeramente mayor que el de dicha cámara operacional dispuesto en el interior de dicho compartimento estanco y en comunicación de fluido con la cámara operacional ; y
d) medios de inundación…
{kind=link}