CIP-2021 : B25J 9/18 : eléctricos.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/18[2] › eléctricos.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/18 · · eléctricos.
CIP2021: Invenciones publicadas en esta sección.
Método de control de una máquina con actuación redundante paralela, dispositivo de control asociado y máquina.
(01/02/2017) Un método para controlar una máquina que comprende:
- un marco ,
- un elemento móvil accionado en relación con dicho marco a lo largo de un cierto número de grados de libertad por una pluralidad de transmisiones mecánicas , cuyo número es estrictamente mayor que el número de grados de libertad de dicho elemento móvil, estando dichas transmisiones mecánicas paralelas entre sí y accionadas cada una por al menos un accionador que comprende:
* un cuerpo fijado a dicho marco,
* un miembro para accionar una transmisión mecánica ,
* un sensor de posición diseñado para producir una señal, llamada señal de posición medida, que…
Procedimiento para calificar la precisión de un sistema con control numérico.
(04/11/2013) Un procedimiento de calificación de la precisión de un sistema de mecanizado que tiene una máquina multiejecon control numérico y un accesorio de sujeción flexible para sujetar las piezas de trabajo (W) amecanizar, y que pasa a realizar la operaciones de mecanizado tras la calificación, en el que el procedimientocomprende:
montar una sonda de medición de contacto en un husillo de la máquina donde una máquinaherramienta estaría montada normalmente para el mecanizado,
comprobar la precisión del posicionamiento de la máquina moviendo la máquina para hacer que lasonda contacte con un elemento de referencia (M) fijo montado en una posición conocida, de maneraque la sonda mide una posición del elemento de referencia (M), y pasar a la siguiente etapa solo si laposición medida por la sonda del elemento de referencia…
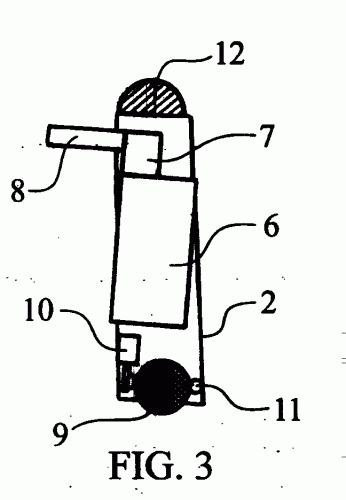
APARATO PARA LA REALIZACION DE FUNCIONES REPETITIVAS PREPROGRAMADAS, CON MOVILIDAD AUTOMATIZADA Y ACCESO A INTERNET.
(01/01/2005). Ver ilustración. Solicitante/s: GIL MIQUEL,ANTONI. Inventor/es: GIL MIQUEL,ANTONI.
Aparato para la realización de funciones repetitivas preprogramadas, con movilidad automatizada y acceso a Internet. El aparato comprende un módulo funcional destinado a funciones específicas preprogramadas con desplazamientos automatizados y un módulo de servicio destinado a dar servicio al módulo funcional, comprendiendo el primer módulo dispositivos actuadores para las funciones específicas, sensores de evaluación de parámetros y accesorios de realización de las funciones y comprendiendo el segundo módulo medios de suministro de energía y medios de movimiento automatizado del aparato así como dispositivos de orientación, de control de energía y de conectividad con fuentes de energía e Internet para usuarios y controladores externos, así como aparatos similares.
PROCEDIMIENTO DE PILOTAJE DE UN BRAZO DE ROBOT, QUE DEFINE TRAYECTOS DE SUSTITUCION.
(01/04/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: DETRICHE, JEAN-MARIE.
PROCESO DE CONTROL DE UN BRAZO DE ROBOT QUE COMPRENDE UN CIERTO NUMERO DE ARTICULACIONES (A A F) SUSCEPTIBLES DE SERVIR DE TOPE. SE DEFINEN AUTOMATICAMENTE TRAYECTOS DE SUSTITUCION, POR UN CALCULO O POR LA ELECCION DE OBJETIVOS INTERMEDIOS, PARA LLEGAR A PUNTOS DE DESTINO CUANDO EL TRAYECTO DIRECTO IMPLICARIA QUE CIERTAS ARTICULACIONES ACTUASEN COMO TOPES.
ENSAMBLAJE DE PARTES CON GUIA POR CAPACITANCIA.
(16/02/1995). Solicitante/s: AT&T CORP.. Inventor/es: ACKERMANN, DAVID ALAN, BOIE, ROBERT ALBERT.
METODOS Y APARATOS PARA EL ENSAMBLAJE DE PARTES UTILIZANDO SENSIBILIDAD CAPACITIVA, TANTO PARA CONTROLAR LA FASE DE CIERRE (HOMING) DEL PROCESO DE ENSAMBLAJE COMO PARA ADQUIRIR UNA O MAS DE LAS PARTES ANTES DE QUE SE REALICE ESTA FASE. SE DESCRIBEN EL ENSAMBLAJE DE PARTES SEMICONDUCTORAS A PAQUETES ESENCIALMENTE BIDIMENSIONALES O TRIDIMENSIONALES, LA INSERCION DE UNA SALIENTE EN UN ORIFICIO, Y LA APLICACION A LA TECNOLOGIA DE ENLAZAMIENTO AUTOMATICO POR CINTA (EAPC), SE DESCRIBEN TAMBIEN VARIAS REPRESENTACIONES DE LOS DATOS CAPACITIVOS RESULTANTES. SE INCLUYEN LOS USOS DE PROGRAMACION Y SENSIBILIDAD OPTICA PARA SUPLEMENTAR LA SENSIBILIDAD CAPACITIVA DE LOS APARATOS Y METODOS.
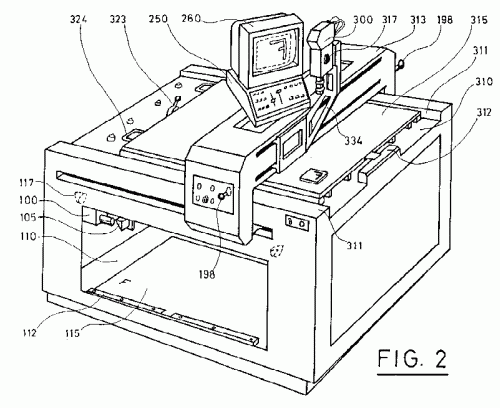
MESA PARA EL POSICIONADO DE ELEMENTOS SOBRE UN SOPORTE SEGUN UN DOCUMENTO DE REFERENCIA.
(01/09/1990). Ver ilustración. Solicitante/s: BOSBOT S.A. Inventor/es: BOUJON, GERARD.
MESA PARA EL POSICIONADO DE ELEMENTOS SOBRE UN SOPORTE SEGUN UN DOCUMENTO DE REFERENCIA Y MAS PARTICULARMENTE MESA QUE PERMITE DISPONER EXACTAMENTE CLICHES DE GOFRADO SOBRE UN CHASIS QUE SE INSERTA A CONTINUACION EN UNA MAQUINA DE TRANSFORMACION DE UN MATERIAL EN HOJAS O BANDAS CARACTERIZADA PORQUE COMPRENDE UNA PLATAFORMA , UN PLANO DE TRABAJO , MEDIOS ELECTRONICOS DE ACCIONAMIENTO Y UNA DIRECCION DE MEZCLADO VIDEO ELECTRONICO.
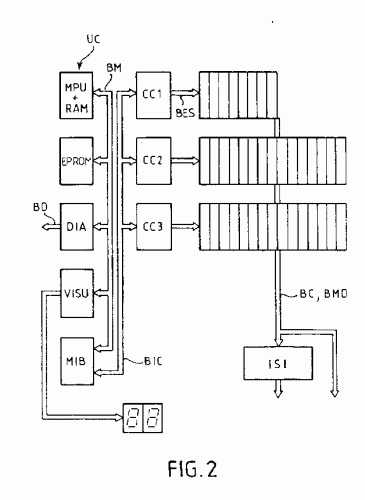
AUTOMATA DESTINDO A MANDAR A ACCIONADORES EN FUNCION DEL ESTADO DE LOS CAPTADORES.
(16/03/1988). Ver ilustración. Solicitante/s: CHARBONNAGES DE FRANCE. Inventor/es: LOUAPRE, JEAN-CLEMENT, DUBAIL, DANIEL.
SE DESCRIBE UN AUTOMATA DESTINADO A MANDAR ACCIONADORES EN FUNCION DEL ESTADO DE LOS CAPTADORES C, DEL TIPO QUE COMPRENDE UNA UNIDAD (MPU B RAM - ERPOM-DIA) Y FICHAS DE ENTRADAS/SALIDAS, COMPRENDE UN PRIMER BUS DE ENLACE BM ASOCIADO A LA UNIDAD CENTRAL, UN SEGUNDO BUS DE ENLACE BIC QUE UNE A ESTE PRIMER BUS, A TRAVES DE UN MODULO DE INTERFACE DE BUS MIB, AL MENOS UNA FICHA DE CONTROL CC1, CC2 O CC3, Y AL MENOS UN TERCER BUS DE ENLACE BES QUE UNE UN GRUPO DE FICHAS DE ENTRADAS/SALIDAS A ESTA FICHA DE CONTROL. EL INVENTO ES APLICABLE A LA AUTOMATIZACION DE MAQUINAS MINERAS PRINCIPALMENTE.
SISTEMA DE CONTROL PARA UN APARATO MANIPULADOR.
(01/06/1986) MODIFICACIONES EN UN SISTEMA DE CONTROL PARA UN MANIPULADOR PROGRAMABLE. CONSISTENTES EN: ELEMENTOS PARA GENERAR UNA SEÑAL DE REALIMENTACION DE VELOCIDAD CORRESPONDIENTE A LA VELOCIDAD REAL DEL BRAZO DEL MANIPULADOR EN EL EJE INTERMEDIO POR UN PUNTO ENTRE LA EJECUCION Y LOS IMPULSORES DEL INTERMEDIO; ELEMENTOS PARA DESARROLLAR UNA CANTIDAD REPRESENTATIVA DE LA PORCION DE LA VELOCIDAD REAL QUE SE PIERDE EN LA EJECUCION DE LA SEÑAL DURANTE EL MOVIMIENTO DEL BRAZO EN EL EJE INTERMEDIO; ELEMENTOS SENSIBLES A LA SEÑAL DE REALIMENTACION DE VELOCIDAD Y A LA CANTIDAD REPRESENTATIVA DE LA VELOCIDAD PERDIDA, PARA DESARROLLAR UNA SEÑAL DE REALIMENTACION…
UN PROCEDIMIENTO DE MEDICION DE PUNTOS PARA UN ROBOT.
(16/06/1983). Solicitante/s: KABUSHIKI KAISHA SANKYO SEIKI SEISAKUSHO.
PROCEDIMIENTO DE MEDICION DE PUNTOS PARA UN ROBOT. CONSTA DE UNA UNIDAD PROGRAMADORA Y UNA UNIDAD DE CONTROL . LA UNIDAD PROGRAMADORA INCLUYE UN TECLADO , UNA UNIDAD CENTRAL DE PROCESO , UNA MEMORIA , UNA UNIDAD DE VISUALIZACION , UNA IMPRESORA Y UN CIRCUITO DE COMUNICACION . LA UNIDAD DE CONTROL SE COMPONE DE UN CIRCUITO DE COMUNICACION , UNA MEMORIA , UNA UNIDAD SELECTORA , UN CIRCUITO DE CONTROL Y OTRO DE ENTRADAS Y SALIDAS , UN CIRCUITO DE ACCIONAMIENTO Y OTRO DE POSICION DE MODOS.
PROCEDIMIENTO E INSTALACION PARA EL DESPLAZAMIENTO DE UN APARATO DE TRASLADO POR SUPERFICIES.
(01/02/1978). Solicitante/s: COMBUSTION ENGINEERING, INC..
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}