CIP-2021 : B25J 19/02 : Dispositivos sensibles.
CIP-2021 › B › B25 › B25J › B25J 19/00 › B25J 19/02[1] › Dispositivos sensibles.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
B25J 19/02 · Dispositivos sensibles.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Procedimiento de tratamiento de una superficie, y autómata correspondiente.
(20/05/2020) Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de:
- una base configurada para desplazarse por un suelo,
- una plataforma montada sobre la base y configurada para desplazarse, al menos en parte, perpendicularmente a la base , por ejemplo, verticalmente, y
- un medio de tratamiento , por ejemplo, un brazo, montado sobre la plataforma y que consta de un extremo móvil configurado para tratar una superficie dada,
procedimiento en donde: caracterizado por que
a) se divide la superficie a tratar en subdivisiones de superficie inferior o igual a la superficie dada, siendo las subdivisiones obtenidas por distribución de la superficie a tratar de acuerdo con una cuadrícula regular cuyas líneas corresponden a los desplazamientos de la plataforma y de la base ,
a') se…
Dispositivo automatizado con una estructura móvil, en concreto un robot.
(19/02/2020) Dispositivo automatizado , en concreto, un robot, que comprende:
- una estructura móvil (4 a 8; 103; 203; 301);
- medios de accionamiento (M; 102; 202), para provocar desplazamientos de la estructura móvil (4 a 8; 103; 203; 301);
- un sistema de control, que incluye una unidad de control y es capaz de controlar los medios de accionamiento (M; 102; 202);
- una cubierta sensorizada , que cubre, como mínimo, una parte de la estructura móvil (4 a 8; 103; 203; 301) e integra medios de detección (C, P) que incluyen, como mínimo, uno de medios de detección de contacto (C) y medios de detección de proximidad (P);
en el que la cubierta sensorizada comprende una pluralidad de módulos de cubierta (21 a 39; 110 a 113; 201 a 2011; 321 a 328), teniendo cada uno una estructura de soporte de carga respectiva de una forma predefinida,…
Sistema de laminado automatizado de chapas y método de colocación.
(19/02/2020) Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende:
un robot ;
un efector terminal sobre el robot para la elevación de una chapa desde un kit de chapas y la colocación de la chapa en una localización preseleccionada, comprendiendo el efector terminal:
un escáner ;
una cámara ;
un agarrador ; y
un sensor de fuerza ;
una cámara fija para grabación de la posición de la chapa sobre el efector terminal ; y
un controlador conectado con el robot y el efector terminal ,
en el que el escáner está sobre el efector terminal para la detección de características con relación a la localización en la que ha…
Cobertura sensorizada para dispositivo industrial.
(19/02/2020) Dispositivo automatizado , en concreto, un robot, que comprende:
- una estructura móvil (4 a 8; 103; 203; 301);
- medios de accionamiento (M; 102; 202), para provocar desplazamientos de la estructura móvil (4 a 8; 103; 203; 301);
- un sistema de control , que incluye una unidad de control y es capaz de controlar los medios de accionamiento (M; 102; 202);
- una cobertura sensorizada , que cubre, como mínimo, una parte de la estructura móvil (4 a 8; 103; 203; 301)
en el que la cobertura sensorizada integra medios de sensor (C, P) que incluyen, como mínimo, uno de medios de sensor de contacto (C) y medios de sensor de proximidad (P),
en el que la cobertura sensorizada comprende una pluralidad de módulos (21 a 39; 110 a 113; 201 a 2011; 321 a 328) de cobertura, teniendo cada uno una…
Control de movimiento de los conjuntos de robot de seguimiento que fabrican aeronaves.
(15/01/2020) Un método que comprende:
disponer un conjunto de robot móvil próximo a un fuselaje de una aeronave que se ensambla y configura para realizar trabajos dentro del fuselaje, un sensor de alcance izquierdo y un sensor de alcance derecho ubicados en el conjunto de robot móvil ;
alinear el sensor de alcance izquierdo del conjunto con un objetivo izquierdo ;
alinear el sensor de alcance derecho del conjunto con un objetivo derecho ;
dirigir el conjunto para que atraviese una ubicación dentro del fuselaje de la aeronave en la que un robot en el conjunto realizará trabajos sobre el fuselaje ;
determinar…
Dispositivo para la medición de una rosca.
(23/10/2019) Dispositivo para la medición de una rosca , que comprende
un alojamiento para alojar de manera separable un tubo , en donde la rosca está conformada en un extremo del tubo , un primer tramo de medición óptica con un primer sensor óptico (5a),
en donde el primer tramo de medición óptica está instalado en un manipulador del dispositivo, que está configurado para mover el primer tramo de medición con respecto al tubo , y en donde el primer tramo de medición óptica puede bascular de manera ajustable alrededor de un primer eje (S1) de posicionamiento con respecto a un eje (A) de rosca de la rosca , en donde en el manipulador está dispuesto un segundo tramo de medición óptica del dispositivo con un segundo sensor óptico (5a), en donde los tramos de medición óptica configuran en conjunto un canal de medición para la…
Conjunto funcional para una máquina industrial, en concreto para un robot, que incluye una unidad funcional equipada con una cubierta de seguridad.
(18/09/2019) Conjunto funcional para una máquina industrial, en particular para un robot, comprendiendo dicho conjunto funcional:
- un bastidor de soporte, provisto de un reborde para ser sujetada a una muñeca de robot o a otro elemento de una máquina industrial,
- una unidad funcional , por ejemplo, una herramienta de sujeción o una herramienta de operario, soportada por dicho bastidor de soporte,
- una cubierta de seguridad para dicha unidad funcional , que está dispuesta en dicho bastidor de soporte, y que define un volumen de contención,
- en el que dicho conjunto funcional puede asumir una primera configuración funcional, en el que dicha cubierta de seguridad rodea y cubre dicha unidad funcional , y una segunda configuración funcional, en el que dicha unidad funcional está, como mínimo parcialmente, fuera del volumen de…
Aparato para el remachado.
(07/08/2019) Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo (X2) que tiene una posición y una orientación predeterminadas con respecto a dicha parte (π) de la superficie plana de la pieza (P), comprendiendo dicho aparato:
- un dispositivo operativo de remachado con un eje operativo principal (X1), que tiene una posición y una orientación predeterminadas con respecto al dispositivo operativo de remachado ; y
- un robot para posicionar el dispositivo operativo de remachado con respecto a la pieza (P), y capaz de modificar la posición y/o la orientación del dispositivo operativo de remachado con respecto a la pieza (P),
- en el que dicho robot de posicionado es un robot de manipulación que tiene el dispositivo…
Disposición de rampa con característica de extracción.
(17/05/2019) Elemento adaptado para liberar un objeto agarrado por una unidad de agarre, en el que dicha unidad de agarre incluye una pluralidad de dedos de agarre para agarrar el objeto, comprendiendo dicho elemento :
un cuerpo (3202A) tubular que comprende una perforación (3202B) axial central que discurre por la longitud del cuerpo (3202A) tubular con un primer extremo (3202C) y un segundo extremo (3202D), en el que el cuerpo (3202A) tubular está configurado para recibir al menos una porción de dicho objeto en dicha perforación (3202B) axial central a través de dicho primer extremo (3202C),
caracterizado porque
el primer extremo (3202C) incluye una pluralidad de ranuras paralelas al eje de la perforación (3202B) axial central y que están abiertas en el primer extremo (3202C),…
Sistemas y procedimientos de alineación óptica de combustible en reactores nucleares.
(11/04/2018) Un sistema para situar estructuras de manipulación con artículos para su manipulación en un entorno de reactor nuclear, comprendiendo el sistema:
una estructura de manipulación que se puede mover sobre un área que aloja al menos un artículo , en el que la estructura de manipulación se configura para mover el artículo ; y
una pluralidad de emisores rígidamente fijados a la estructura de manipulación, en el que los emisores se configuran para emitir al menos dos haces planos de luz perpendiculares entre sí y que se intersectan sobre el área en una línea exactamente axial entre el área y la estructura de manipulación, en el que los dos haces son perpendiculares entre sí en un plano perpendicular a una dirección de profundidad axial;
en el que, durante su uso, los dos haces planos perpendiculares de luz se…
Detección de proximidad en robots móviles.
(01/11/2017) Un robot autónomo que comprende:
un cuerpo del robot que define una dirección motriz de avance (F);
un sistema motriz que soporta el cuerpo del robot y configurado para maniobrar el robot sobre una superficie (10, 10a, 10b);
al menos un detector de proximidad (520, 520a, 520b, 520c, 520d, 520e, 520f) que comprende:
un primer componente que tiene un primer campo de visión ;
un segundo componente (522a, 524a) que tiene un segundo campo de visión (523a, 525a), intersectando el primer campo de visión el segundo campo de visión (523a, 525a) para formar un primer volumen de intersección (V1);
…
EQUIPO ROBOTIZADO PARA LA LOCALIZACIÓN DE ARTÍCULOS EN UNA TIENDA Y SU PROCEDIMIENTO DE FUNCIONAMIENTO.
(10/10/2016). Solicitante/s: Tier1 Technology, S.L. Inventor/es: BORDONS ALBA,CARLOS, FERNANDEZ CAMACHO,EDUARDO, RIDAO CARLINI,Miguel Ángel, HERNÁNDEZ RODRÍGUEZ,Gonzalo, RUBIO GONZÁLEZ, Francisco Javier, CORDERO AMARILLO,José Luis.
Equipo robotizado para la localización de artículos en una tienda y su procedimiento de funcionamiento.
Equipo robotizado para la localización de artículos en coordenadas XYZ en una tienda que consta de un robot móvil y puede comprender opcionalmente un ordenador externo conectado por vía inalámbrica con el robot , que a su vez está formado por un sistema de visión artificial , un sistema de barrido y detección de obstáculos , un sistema de lectura de etiquetas activas con señales ópticas y/o electromagnéticas , un sistema de desplazamiento formado por al menos dos ruedas motrices, una batería y un controlador que comprende una placa principal con un sistema operativo de código abierto, estando conectado dicho controlador con los diferentes sistemas que conforman el robot y estando configurado para recibir datos de dichos sistemas y procesarlos con objeto de crear un mapa de la tienda y determinar la ubicación de cada artículo en la tienda.
PDF original: ES-2585977_B1.pdf
PDF original: ES-2585977_A1.pdf
Sistema automatizado para aislar, amplificar y detectar una secuencia blanco de ácidos nucleicos.
(06/07/2016) Un sistema completamente automatizado para tratar un componente de interés contenido en al menos una muestra, que comprende:
una estación de separación que comprende un dispositivo de extracción, adaptado para recibir y extraer el componente de interés de dicha muestra cuando la muestra está dispuesta en un tubo;
una estación de incubación de amplificación que comprende un calentador y un instrumento prensor de junta de placa, estando la estación de amplificación adaptada para recibir una placa de amplificación que comprende una pluralidad de pocillos;
una estación de detección, adaptada para detectar la presencia de dicho componente de interés extraído por dicho dispositivo de extracción, estando la estación…
Instrumento para cirugía robótica.
(18/05/2016) Un instrumento para cirugía robótica diseñado para montarse en el extremo distal de un brazo operativo de un aparato para cirugía robótica, comprendiendo el instrumento : medios efectores para realizar una acción determinada en el cuerpo de un paciente durante una operación quirúrgica; un conjunto de articulación para soportar dichos medios efectores y que conecta los medios efectores a dicho extremo distal de dicho brazo operativo ; y unos primeros medios de sensor , que están asociados a dicho conjunto de articulación para detectar las fuerzas y los pares de torsión aplicados a dichos medios efectores ; estando el instrumento caracterizado por que dicho…
Robot industrial y procedimiento de control de un robot industrial.
(11/05/2016) Un robot industrial que comprende:
- un manipulador con un número de grados de libertad (A1-A6), que tiene una estructura mecánica que comprende una pluralidad de partes móviles, entre las cuales un efector de extremo y una o más articulaciones de conexión accionadas por motores (11'-14') eléctricos con correspondientes transductores (S) de posición asociados;
- una unidad de control del manipulador , que comprende medios de selección operables por un usuario para la selección de una pluralidad de posibles modos de operación del robot , entre los cuales al menos un modo de operación automático;
- un primer sistema de detección, para detectar la posible presencia de un cuerpo extraño (HO) en un área de trabajo predefinida del manipulador , en particular, un ser humano;
- un segundo…
Aparato y procedimiento de transferencia de guantes.
(01/04/2015) Un aparato para la transferencia de un guante desde un transportador a una estación de trabajo , comprendiendo el aparato:
una cámara para la localización de un puño del guante sobre el transportador ;
un conjunto de recogida que comprende un par de pinzas interiores para sujetar el puño y dos pares de pinzas exteriores para la apertura del guante ;
un par de sensores para determinar la posición del guante agarrado por el par de pinzas interiores y los dos pares de pinzas exteriores ;
un brazo robótico que comprende una pluralidad de segmentos unidos , en el que el conjunto de recogida está montado en uno de la pluralidad…
CABEZAL Y PROCEDIMIENTO DE MECANIZADO AUTOMÁTICO CON VISIÓN.
(20/11/2014). Ver ilustración. Solicitante/s: LOXIN 2002, S.L.. Inventor/es: ANDUCAS AREGALL,Jordi, GANCHEGUI ITURRIA,Carlos, GALARZA CAMBRA,José Javier.
Cabezal y procedimiento de mecanizado automático con visión que comprende un pie de presión dotado de ventanas laterales can capacidad de apertura y cierre, envolviendo la herramienta de mecanizado, asociado con un dispositivo de desplazamiento vertical dotado de bloqueo mecánico, un equipo de visión conectado con un equipo informático y un módulo de comunicaciones. La invención que se presenta aporta la principal ventaja de dotar a un robot antropomórfico, pensado originalmente para la industria del automóvil y dotado de una precisión relativamente baja, de una precisión de mecanizado notablemente superior, equivalente a equipos de mucha mayor precisión o a robots de tipo de cinemática paralela, compensando asimismo, en tiempo real y de forma continua, el descentrado y la pérdida de la perpendicularidad por la presión del pie de presión, que son comunes en los cabezales convencionales y fuente de errores y falta de precisión.
Cabezal y procedimiento de mecanizado automático con visión.
(19/11/2014) Cabezal y procedimiento de mecanizado automático con visión que comprende un pie de presión dotado de ventanas laterales con capacidad de apertura y cierre, envolviendo la herramienta de mecanizado, asociado con un dispositivo de desplazamiento vertical dotado de bloqueo mecánico, un equipo de visión conectado con un equipo informático y un módulo de comunicaciones.
La invención que se presenta aporta la principal ventaja de dotar a un robot antropomórfico, pensado originalmente para la industria del automóvil y dotado de una precisión relativamente baja, de una precisión de mecanizado notablemente superior, equivalente a equipos de mucha mayor…
Procedimiento y sistema de asistencia para la manipulación de máquinas robotizadas en un entorno congestionado.
(20/11/2013) Procedimiento de asistencia para la manipulación de al menos una primera máquina móvil robotizada quese desplaza por un entorno de trabajo congestionado bajo el control de al menos una segunda máquina móvilrobotizada, como un sensor o una herramienta que interactúa con dicho entorno, caracterizado porque comprendeal menos las siguientes etapas:
• modelización de una representación virtual, en tres dimensiones, del entorno de trabajo y de los objetosreales que este comprende;
• determinación, en el entorno de trabajo, de un punto de destino hacia el cual está orientada la línea devisión de dicha segunda máquina móvil robotizada;
• determinación…
Método y aparato para control háptico.
(23/10/2013) Un método de simulación de movimiento, comprendiendo el método las etapas de:
proporcionar al menos seis grados de libertad de movimiento a un usuario asociando de forma operativa un brazorobot antropomórfico con un receptáculo del usuario para alojar todo el cuerpo del usuario, en el que elbrazo robot está adaptado para situar el receptáculo del usuario en cualquier lugar en el plano X, Y y Z deun sistema de coordenadas cartesianas con cualquier orientación;
proporcionar retroalimentación háptica al usuario en correspondencia con el movimiento del receptáculo del usuario además de la sensación háptica en todo el cuerpo proporcionada por el brazo robot en solitario.
ROBOT TELECOMANDADO PARA OPERACIONES ESPECIALES.
(29/03/2012). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Inventor/es: SALLEN ROSELLO,CESAR, TORRES PUEO,ROBERTO.
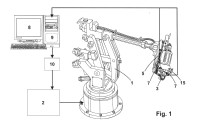
Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia,de forma que el robot incorpora sobre el tren de rodadura una torreta , giratoria 360º, provista de, al menos, una cámara térmica y a cuya torreta es solidario un brazo constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo de, al menos, una cámara y, al menos, un arma disuasoria , pudiendo utilizarse para la vigilancia de puntos estratégicos,así como de zonas fronterizas, e incluso, actuar como medio disuasorio al ser portador de, al menos, un arma defensiva intimidatoria.
Medios de posicionamiento para producir señales luminosas para posicionar una herramienta robótica con relación a un pieza de trabajo; método de utilización de tales medios de posicionamiento.
(27/03/2012) Un dispositivo de posicionamiento para producir una señal luminosa para posicionar una herramienta robótica con relación a una pieza de trabajo , que comprende:
un bastidor que tiene extremos opuestos primero y segundo y un canal , pudiendo fijarse el primer extremo del bastidor a un extremo de la herramienta robótica ;
unos medios de iluminación para producir al menos un par de haces de luz que se proyectan hacia fuera del segundo extremo del bastidor ;
los medios de iluminación comprenden al menos un par de fuentes de luz y están dispuestos para dirigir los haces de luz de dichas fuentes en direcciones convergentes de modo que los haces de luz se intersequen uno a otro y proporcionen una señal luminosa a una distancia predeterminada del segundo extremo del…
DISPOSICION PARA LA APLICACION DE SUSTANCIA ADHESIVA A UNA PIEZA DE TRABAJO.
(16/07/2005) Dispositivo para la aplicación de sustancia adhesiva a una pieza de trabajo, dotada de un cabezal de boquilla que presenta una boquilla de aplicación para que se pueda impulsar una sustancia adhesiva viscosa bajo presión, pudiéndose desplazar entre sí el cabezal de la boquilla y la pieza de trabajo mediante una disposición de robot , porque se puede aplicar sustancia adhesiva en forma de una tira de sustancia adhesiva , preferentemente en un chorro de rociado desde la boquilla de aplicación , a lo largo de una trayectoria de aplicación predeterminada sobre la pieza de trabajo , y encontrándose una disposición de cámara en el cabezal de boquilla o en el elemento de robot correspondiente,…
SISTEMA DE VERIFICACION VISUAL DE LA POSICION DE TUBOS.
(16/12/2002) Un sistema de verificación de posición de tubos para su uso en la inspección y mantenimiento de placas de tubos de generadores de vapor del tipo que tiene una pluralidad de extremos de tubo en una placa de tubos dispuestos de acuerdo con un sistema de coordenadas predeterminado y un brazo robótico para mover un actuador final EE contiguo a la superficie de la placa de tubos hasta las posiciones de sucesivos extremos de tubo, caracterizado por: un dispositivo de formación de imágenes conectado al brazo robótico para la formación de fotogramas de imágenes sucesivas a medida que se mueven el brazo robótico y un actuador final (EE) a través de la superficie de la placa de tubos ; una fuente de…
(01/09/1995). Solicitante/s: SIG SCHWEIZERISCHE INDUSTRIE-GESELLSCHAFT. Inventor/es: BUCHI, FELIX, HUBER, ROMAN, LANG, TONI.
PARA AHORRAR TIEMPO A LA HORA DE TRASLADAR OBJETOS DE UN PRIMER LUGAR SOBRE UNA SUPERFICIE A UN SEGUNDO LUGAR CON LA AYUDA DE UN MANIPULADOR, LA POSICION DEBE DETERMINAR LOS OBJETOS DE LA PARTE Y, AL MISMO TIEMPO, REGISTRAR LOS OBJETOS (2A, 2B, 2C) PARTIENDO DE LA OTRA PARTE DE LA SUPERFICIE.
PROCEDIMIENTO DE CALIBRACION DE UN SISTEMA DE ADQUISICION DE FORMA TRIDIMENSIONAL Y SISTEMA PARA LA PUESTA EN PRACTICA DE DICHO PROCEDIMIENTO.
(01/02/1994). Solicitante/s: SA KREON INDUSTRIE. Inventor/es: BRUNET, MICHEL, COSNARD, ERIC BARBE D\'OR, DELTOUR, BERNARD.
LA INVENCION SE REFIERE A UN PROCESO DE CALIBRACION DE UN SISTEMA DE ADQUISICION TRIDIMENSIONAL DE FORMA. ESTE PROCESO CONSISTE EN REALIZAR PREVIAMENTE LA ADQUISICION DE LA FORMA DE UNA MIRA DE CALIBRACION QUE POSEE RELIEVES GEOMETRICOS CONOCIDOS PARA MEMORIZAR INFORMACION BRUTA REPRESENTATIVA DE LOS ECOS DE DICHA MIRA DE CALIBRACION PERCIBIDOS POR EL SISTEMA. LA ADECUACION ENTRE ESTA INFORMACION BRUTA E INFORMACION DE DEFINICION GEOMETRICA QUE SE REFIERE A DICHA MIRA PERMITE ESTABLECER LA FUNCION GLOBAL DEL SISTEMA QUE, DURANTE LAS MEDICIONES, PERMITE TRANSFORMAR LA INFORMACION BRUTA RELATIVA A CUALQUIER FORMA EN COORDENADAS (X, Y, Z) EN UN REFERENCIAL ABSOLUTO.
MAQUINA ROBOTIZADA, ESPECIALMENTE PARA LA RECOGIDA DE FRUTAS.
(16/11/1991). Solicitante/s: ETABLISSEMENTS PELLENC ET MOTTE CENTRE NATIONAL DU MACHINISME AGRICOLE, DU GENIE RURAL, DES EAUX ET DES FORETS (CEMAGREF). Inventor/es: PELLENC,ROGER, ROMBAUT, MARC, MONTOYA, JOSE LUIS, GRAND D\' ESNON, ANTOINE.
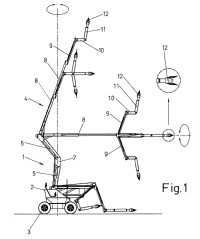
MAQUINA ROBOTIZADA, ESPECIALMENTE PARA LA RECOGIDA DE FRUTAS, CARACTERIZADA POR QUE COMPRENDE: POR UNA PARTE UN BRAZO DE MANIPULACION O MANIPULADOR MONTADO CON CAPACIDAD DE ROTACION ALREDEDOR DE DOS EJES PERPENDICULARES Y CONCURRENTES (A-A,B-B) Y CUYO EXTREMO LIBRE ESTA PROVISTO DE UN ORGANO DE COGIDA , Y, POR OTRA PARTE, UN SISTEMA DE VISION INSTALADO DE FORMA FIJA EN EL PUNTO DE INTERSECCION DE ESTOS EJES DE ROTACION; DICHO ORGANO DE COGIDA ESTA MONTADO CON UNA LATITUD DE TRASLACION ALINEADA CON EL HAZ OPTICO DE DICHO SISTEMA DE VISION, A LO LARGO DE UNA TRAYECTORIA RECTILINEA (C-C) QUE CRUZA LA INTERSECCION DE DICHOS EJES DE ROTACION (A-A,B-B), EN EL CENTRO OPTICO DEL SISTEMA DE VISION.
PROCEDIMIENTO PARA EL RECONOCIMIENTO DE CAMBIOS EN EL ESPACIO DE VIAJE DE UN VEHICULO SIN CONDUCTOR.
(01/02/1990). Solicitante/s: CARL SCHENCK AG. Inventor/es: SCHULZE, EKKEHARD, VON SEELEN, WERNER, PROF. DR., STOHRJOHANN, KAI.
EN UN PROCEDIMIENTO PARA EL RECONOCIMIENTO DE CAMBIOS EN EL ESPACIO DE VIAJE EN UN SISTEMA DE TRANSPORTE DURANTE UN VIAJE, MEDIANTE TOMAS SIN CONTACTO, CON TRATAMIENTO DE VALORES DE MEDICION PARA EL MANDO DEL SISTEMA DE TRANSPORTE, CADA CAMBIO ESPACIAL EMITE UNA SEÑAL CON UNA SERIE DE IMAGENES MEDIANTE UNA VIDEOCAMARA DELANTE DEL VEHICULO. DURANTE EL TIEMPO DE DIFERENCIA REAL ENTRE LAS IMAGENES SE AVERIGUAN LAS DIFERENCIAS Y SE MANDAN ORDENES DE MANEJO AL SISTEMA DE TRANSPORTE SIN CONDUCTOR, PARA EVITAR UNA COLISION CON EL OBSTACULO.
APARATO DE PRESENTACION VISUAL DE TIPO ELECTROMECANICO.
(16/06/1982). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
APARATO ELECTROMAGNETICO DE PRESENTACION VISUAL DE IMAGEN, CON MANIPULACION CONTROLADA A DISTANCIA, PARA EL CONTROL DE POSICION TRIDIMENSIONAL. PARA INDICAR LA POSICION DE UN PRIMER ELENTO MOVIL RESPECTO A OTRO FIJO UTILIZA UNA PLURALIDAD DE SEÑALES DE CONTROL SUMINISTRADAS DE ACUERDO CON LAS COORDENADAS CARTESIANAS DE LA POSICION RELATIVA DE AMBOS ELEMENTOS . INCLUYE UN DISPOSITIVO QUE PROPORCIONA UNA IMAGEN MOVIL Y UNA IMAGEN FIJA . PRESENTA UNA SERIE DE SERVOMECANISMOS PARA HACER VARIAR EL TAMAÑO DE LA IMAGEN Y PARA SEGUIR EL MOVIMIENTO DEL ELEMENTO SEGUN LOS EJES COORDENADOS (X,Y,Z).
DISPOSITIVO FOTOELECTRICO DE ADAPTACION PARA POSICIONAR A DISTANCIA UN PRIMER ELEMENTO CON RELACION A UN SEGUNDO ELEMENTO.
(01/09/1980). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
Dispositivo fotoeléctrico de adaptación para posicionar a distancia un primer elemento con relación a un segundo elemento que incluye: una fuente luminosa puntual conectada de manera fija con el primer elemento y dirigida para concentrar un estrecho haz de luz a lo largo de un trayecto preestablecido; una fotocélula conectada de manera fija al segundo elemento y que tiene por lo menos tres salidas eléctricas tomadas a partir de emplazamientos sustancialmente simétricos en la superficie fotosensible de la célula, unos medios para transformar las salidas en un segundo grupo de tensiones eléctricas de salida representativas de las coordenadas cartesianas del primer elemento respecto al segundo elemento, caracterizado porque incluye un dispositivo para visualizar las tensiones eléctricas de salida bajo la forma de una representación visual tridimensional de la posición relativa de los primero y segundo elementos.
{kind=link}
{kind=link}