CIP-2021 : B25J 19/06 : Dispositivos de seguridad.
CIP-2021 › B › B25 › B25J › B25J 19/00 › B25J 19/06[1] › Dispositivos de seguridad.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
B25J 19/06 · Dispositivos de seguridad.
CIP2021: Invenciones publicadas en esta sección.
PORTA-HERRAMIENTAS PARA EL ACOPLAMIENTO DE UNA HERRAMIENTA EN UN APARATO DE MANIPULACION.
(16/09/2005) Porta-herramientas para el acoplamiento de una herramienta , especialmente de un soplete de soldadura o de un soplete de corte, en un aparato de manipulación , especialmente en un robot industrial, con un primer soporte de fijación para la fijación de la herramienta en el porta-herramientas y con un segundo soporte de fijación , por ejemplo, una carcasa , para la fijación del porta-herramientas en el aparato de manipulación , en el que el primero y el segundo soporte de fijación se pueden desviar o bien regular relativamente entre sí frente a una tensión previa de resorte de elementos de resorte…
CONMUTADOR DE SEGURIDAD PARA MAQUINA INDUSTRIAL.
(16/05/1999). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: GUNNARSSON, SVEN-ERIC.
LA INVENCION SE REFIERE A UN CONMUTADOR DE SEGURIDAD DISEÑADO PARA SER CONECTADO A UN CIRCUITO DE SEGURIDAD PARA UNA MAQUINA INDUSTRIAL, POR EJEMPLO UN ROBOT INDUSTRIAL. EL CONMUTADOR COMPRENDE UN DISPOSITIVO DE CONTACTO CON UN DISPOSITIVO ACCIONADO A MANO EN EL CUAL UNA VARILLA DE PRESION SE DESPLAZA EN CONTRA DE LA ACCION DE UN MUELLE DE RETORNO DESDE UN PRIMER EXTREMO POR MEDIO DE UNA POSICION DE FUNCIONAMIENTO HASTA UNA SEGUNDA POSICION EXTREMA. EL CIRCUITO DE SEGURIDAD ESTA CERRADO SOLAMENTE EN LA POSICION DE FUNCIONAMIENTO. DURANTE EL MOVIMIENTO DE RETORNO DE LA VARILLA DE PRESION DESDE SU SEGUNDA POSICION HASTA SU PRIMERA POSICION EXTREMA, EL DISPOSITIVO DE CONTACTO NO ES AFECTADO, Y EL CIRCUITO DE SEGURIDAD PERMANECE DE ESTA FORMA ABIERTO DURANTE TODO EL MOVIMIENTO DE RETORNO DEL MISMO.
SISTEMA DE CONTROL ANTI-COLISION PARA UN MANIPULADOR CONTROLABLE DE FORMA MULTI-AXIAL.
(01/05/1999) SE PRESENTA UN SISTEMA DE CONTROL LIBRE DE COLISIONES PARA UN MANIPULADOR MULTIAXIALMENTE CONTROLABLE , QUE COMPRENDE ESENCIALMENTE UNOS BRAZOS DE SOPORTE INTERCONECTADOS , QUE SE MUEVEN POR MEDIO DE ELEMENTOS DE DESPLAZAMIENTO CONTROLABLES DE MANERA QUE EL EXTREMO LIBRE DEL MANIPULADOR PUEDA POSICIONARSE ESPACIALMENTE Y PUEDA SER MOVIDO A DIFERENTES POSICIONES, Y TAMBIEN COMPRENDE UN MEDIO DE CONTROL PARA CONTROLAR LOS ELEMENTOS DE DESPLAZAMIENTO. EL MEDIO DE CONTROL COMPRENDE UN MODELO A ESCALA (1', 3') DEL MANIPULADOR Y DEL OBJETO A SER EXAMINADO O MANEJADO, AL MENOS EL MODELO A ESCALA (1') DEL MANIPULADOR ES MANUALMENTE ACCIONABLE Y ESTA EQUIPADO CON UNA SERIE DE DISPOSITIVOS DE GRABACION DE POSICION, QUE PUEDEN SUMINISTRAR SEÑALES DE CONTROL PARA…
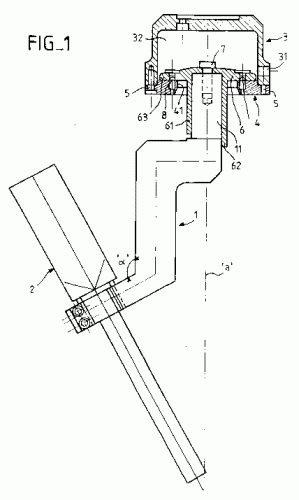
DISPOSITIVO DE ACTIVACION DE LA PARADA AUTOMATICA DE MAQUINAS, TALES COMO ROBOTS.
(01/03/1999). Ver ilustración. Solicitante/s: S.A. EUROSTAMP HEULIEZ. Inventor/es: QUEVEAU, GERARD, COUTY, GERARD, MORICET, PAUL.
DISPOSITIVO DE ACTIVACION DE LA PARADA AUTOMATICA DE MAQUINAS TALES COMO ROBOTS, DEL TIPO QUE COMPRENDE UN BRAZO PIVOTANTE PORTA-HERRAMIENTAS, SUSCEPTIBLE DE ADOPTAR AL MENOS DOS POSICIONES, UNA LLAMADA "OPERATIVA" Y LA OTRA LLAMADA "DE ACTIVACION" DE LA PARADA DEL ROBOT CUANDO DICHO BRAZO SE SOMETE A UNA FUERZA EXTERIOR, SUPERIOR A LA EJERCIDA POR MEDIOS ELASTICOS ENCARGADOS DE MANTENER EL BRAZO EN SU POSICION OPERATIVA.
MODULO DE PARADA DE EMERGENCIA PARA ROBOT.
(16/12/1998). Solicitante/s: COMPTOIR COMMERCIAL DE MECANIQUE ET D'OUTILLAGES DE PRECISION C C M O P. Inventor/es: FARINA, DANIEL YVES.
MODULO DE PARADA DE EMERGENCIA PARA ROBOT O SIMILAR, DEL TIPO QUE COMPRENDE UN CUERPO QUE FORMA UNA CAMARA DE COMPRESION Y QUE ES ALIMENTADO CON AIRE A PRESION DOTADO DE UNA ABERTURA NORMALMENTE OBTURADA POR UN PLATO INTERIOR SOLIDARIO DE UNA PLACA EXTERIOR , ESTANDO EL CUERPO Y LA PLACA EXTERIOR RESPECTIVAMENTE SOLIDARIOS DE DOS ELEMENTOS DEL ROBOT, CARACTERIZADO PORQUE ESTA PROVISTO DE UN DISPOSITIVO DE REARME AUTOMATICO CONSTITUIDO POR UN GATO DISPUESTO EN LA PLACA Y CUYA VARILLA ATRAVIESA EL PLATO INTERIOR PARA APOYARSE EN EL FONDO DEL CUERPO.
MECANISMO DE LIBERACION UMBILICAL.
(16/05/1995) UN MOTOR LINEAL QUE SE PUEDE MOVER A LO LARGO DE UN ESTATOR SUSTANCIALMENTE PLANO (P). HAY ACOPLADAS UNAS FUENTES ACCIONADORAS ELECTRICAS, MECANICAS Y NEUMATICAS AL MOTOR LINEAL A TRAVES DE UN CORDON UMBILICAL (C). UN MIEMBRO DE PROTECCION CONTRA LOS TIRONES , NORMALMENTE ENLAZADO AL MOTOR LINEAL, ES ARRASTRADO POR EL MOTOR LINEAL A LA POSICION DESEADA A LO LARGO DE LA PLACA. EL MIEMBRO DE PROTECCION CONTRA LOS TIRONES SE DESACOPLA ENTONCES DEL MOTOR LINEAL Y ES MAGNETICAMENTE ATRAIDO (O POR VACIO) Y TEMPORALMENTE "FIJADO" A LA PLACA. UNA PORCION DEL CORDON UMBILICAL QUEDA SUJETA AL MIEMBRO DE PROTECCION CONTRA LOS TIRONES EN UN PUNTO INTERMEDIO…
DISPOSITIVO PARA EL CONTROL DE SEGURIDAD DE DISPOSITIVOS DE PROTECCION CON UNA SEGURIDAD NORMAL O INCREMENTADA DE MAQUINAS QUE EJECUTAN MOVIMIENTOS GIRATORIOS ALREDEDOR DE VARIOS EJES.
(01/07/1994). Solicitante/s: ELGE ELEKTRONIK-GERATEWERK GMBH. & CO.
PARA ESTE DISPOSITIVO, QUE ESTA DOTADO DE RELEVADORES DE DESCONEXION EN LA ZONA DE SUMINISTRO DE CORRIENTE DE LA MAQUINA, ASI COMO DE UN CIRCUITO EXTERNO DE CONTROL PARA LAS CUBIERTAS PROTECTORAS, LOS CONTACTOS Y EL MANEJO MANUAL DE MOVIMIENTOS GIRATORIOS LIMITADOS, SE PROPONE DISPONER, EN UN INSTRUMENTO BASE, UNA UNIDAD DE SUMINISTRO DE CORRIENTE ASI COMO UNA UNIDAD DE CONTROL, ALOJANDOSE AMBAS EN CARCASAS PARCIALES SEPARADAS, ENTRE LAS CUALES SE DISPONE UNA UNION DE CONTACTO DE CLAVIJA QUE ES DIVISIBLE Y SIRVE PARA LA INTERPOSICION DE OTRAS UNIDADES DE CONTROL COMPLEMENTARIAS. CADA UNA DE ESTAS UNIDADES CONTROLA EL RADIO DE ACCION DE UN DETERMINADO EJE DE LA MAQUINA. SUS SEÑALES DE SALIDA SON TRANSMITIDAS PARALELAMENTE POR UNAS LINEAS DE CONEXION TRANSVERSAL Y CONDUCIDAS A TRAVES DE LOS DISTINTOS CONTACTOS DE CLAVIJA A LA UNIDAD DE SUMINISTRO DE CORRIENTE QUE SE DIRIGE A TRAVES DE UNOS RELES DE SALIDA SOBRE LOS RELEVADORES DE DESCONEXION DISPUESTOS EN LA PARTE DE POTENCIA DE LA MAQUINA.
JUNTA MULTIDIRECCIONAL CERRADA POR MANIPULADOR.
(01/03/1991). Solicitante/s: ETUDES TECHNIQUES-FRANCHE COMTE-ALSACE ETFA SARL. Inventor/es: BAILLS, JEAN-MICHEL, CRETIEN, GEORGE.
EL PRESENTE INVENTO ES RELATIVO A UN DISPOSITIVO DE PUESTA EN REFERENCIA POR ELEMENTOS DE APREHENSION DESTINADOS EN LA MANUTENCION, Y DE SEGURIDAD MULTIDIRECCIONAL, MONTADO ENTRE EL BRAZO DE UN MANIPULADOR O ROBOT, U OTRO DISPOSITIVO DE MANUTENCION, Y LA PINZA , U OTRO MEDIO DE APREHENSION, CARACTERIZADO EN QUE ESTA LIBRE ESPACIALMENTE Y CERRADOM Y EN QUE EL MEDIO DE UNION ESTA VENTAJOSAMENTE CONSTITUIDO POR TRES GATOS MONTADOS EN ARTICULACION AL MEDIO DE ROTULAS , POR LA CHAPA DEL CILINDRO EN LA PLACA DEL BRAZO , Y POR LA CHAPA DEL PISTON A LA PLACA DE LA PINZA , Y EL MEDIO DE APERTURA DE SEGURIDAD ESTA CONSTITUIDO POR UN PAR DE CAPTADORES DE POSICION O FIN DE CURSO (10 Y 11) QUE DETECTOR RESPECTIVAMENTE LAS POSICIONES BAJA Y ALTA DEL PISTON DE LOS GATOS. CADA GATO ESTA PROVISTA DE UN PAR DE CAPTADORES DE POSICION O DE FIN DE CURSO (10 Y 11).
DISPOSITIVO DE DISYUNCION PARA BRAZO DE ROBOT.
(16/08/1990). Solicitante/s: SYSPRO. Inventor/es: ALVERNHE, GILLES, GIUDICELLI, PATRICE, JAGIELKA, FRANCOIS.
CONSISTE EN INTERPONER EL DISPOSITIVO ENTRE LA EXTREMIDAD DE UN BRAZO DE ROBOT Y UN UTIL LLEVADO POR DICHO BRAZO; DONDE SE CORTA LA UNION MECANICA ENTRE EL UTIL Y EL BRAZO CUANDO SE REALIZAN ESFUERZOS ANORMALES, RADIAL O AXIALMENTE SOBRE EL UTIL. ESTA COMPUESTO DE DOS DISPOSITIVOS INDEPENDIENTES UNO DEL OTRO, CONSTITUIDOS CADA UNO POR UN PISTON QUE PUEDEN DESLIZARSE EN UN RECIPIENTE CERRADO POR UNA TAPA , HABIENDOSE PREVISTO MEDIOS PARA MANTENER EN APOYO EL PISTON CONTRA LA TAPA, CONSTITUIDOS BIEN POR LA PRESION DE UN FLUIDO GASEOSO CONTENIDO EN LA CAJA O BIEN POR UNA FUERZA ELECTROMAGNETICA.
APARATO DE SEGURIDAD PARA BRAZO O MANO DE MANIPULADOR.
(01/05/1990). Solicitante/s: AUTOMOBILES PEUGEOT AUTOMOBILES CITROEN. Inventor/es: BIANNIC, RENE.
APARATO DE SEGURIDAD PARA ORGANO DE PRENSION DE MANIPULADOR DESTINADO A SER INTERPUESTO ENTRE LA MAQUINA Y EL ORGANO DE PRENSION. ESTE APARATO COMPRENDE UN SOPORTE DESTINADO A SER FIJADO SOBRE LA MAQUINA M, DOS GANCHOS (3 Y 3A) MONTADOS DE MANERA GIRATORIA SOBRE ESTE SOPORTE Y APTOS PARA COGER EL ORGANO DE PRENSION B, UN PESTILLO ESCONDIBLE PARA IMPEDIR LA ROTACION DE LOS GANCHOS EN EL SENTIDO CORRESPONDIENTE A LA LIBERACION DEL ORGANO DE PRENSION, Y MEDIOS ELASTICOS DETERIORABLES PARA IMPEDIR QUE EL PESTILLO SE ESCONDA.
{kind=link}