CIP-2021 : G05B 11/36 : con las disposiciones necesarias para obtener características especiales,
p. ej. proporcionales, integrales, diferenciales.
CIP-2021 › G › G05 › G05B › G05B 11/00 › G05B 11/36[2] › con las disposiciones necesarias para obtener características especiales, p. ej. proporcionales, integrales, diferenciales.
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 11/00 Controladores automáticos (G05B 13/00 tiene prioridad).
G05B 11/36 · · con las disposiciones necesarias para obtener características especiales, p. ej. proporcionales, integrales, diferenciales.
CIP2021: Invenciones publicadas en esta sección.
CONTROLADOR RESETEADO DE DESLIZAMIENTO DE RUEDAS PARA SISTEMAS DE FRENADO.
(09/07/2015). Ver ilustración. Solicitante/s: UNIVERSIDAD DE VIGO. Inventor/es: DELGADO ROMERO,María Emma, DÍAZ-CACHO MEDINA,Miguel Ramón, BARREIRO BLAS,Antonio.
La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una señal (u) que es transmitida a través de la red de comunicaciones a un actuador local que proporciona una señal (u), a partir de; una señal que es elaborada por un módulo supervisor y una señal que es elaborada por un módulo estimador de deslizamiento, y donde un módulo estimador de deslizamiento elabora una señal a partir de una señal que es proporcionada por un módulo de información sensorial y una señal que es elaborada por un módulo de estimación de velocidad, a partir de medidas sensoriales proporcionadas por un módulo de información sensorial. La invención se refiere también a un método para el diseño de un controlador resetado de deslizamiento para sistemas de frenado de vehículos.
Controlador reseteado de deslizamiento de ruedas para sistemas de frenado.
(08/07/2015) La presente invención se refiere a un controlador reseteado de deslizamiento para sistemas de frenado de vehículos que proporciona una serial (u) que es transmitida a través de la red de comunicaciones a un actuador local que proporciona una señal (u), a partir de; una señal que es elaborada por un módulo supervisor y una señal que es elaborada por un módulo estimador de deslizamiento, y donde un módulo estimador de deslizamiento elabora una señal a partir de una señal que es proporcionada por un módulo de información sensorial y una señal que es elaborada por un módulo de estimación de velocidad, a partir de medidas sensoriales proporcionadas por un módulo de información sensorial. La invención se refiere también a un método para el diseño…
COMPENSADOR PARA UN SISTEMA DE CONTROL REALIMENTADO Y PROCEDIMIENTO PARA SINTONIZAR DICHO COMPENSADOR.
(24/05/2010) Compensador para un sistema de control realimentado y procedimiento para sintonizar dicho compensador.
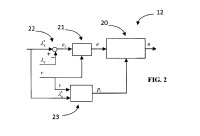
Comprende unos medios de compensación integral , los cuales a su vez comprenden unos primeros medios de compensación y unos segundos medios de compensación , de manera que, cuando el valor de la señal (e) de error es cero, el valor de la salida de los medios de compensación integral, que depende del valor de la salida de los primeros medios de compensación y del valor de la salida de los segundos medios de compensación, es diferente de cero.
Se consigue un compensador con un comportamiento idéntico a un compensador PI en los instantes en los que no se realiza reset,…
FILTRO Y METODO PARA LA COMPENSACION DEL DESFASE INTRODUCIDO POR LA LIMITACION DE PENDIENTE DE UN ACTUADOR.
(16/05/2005) Filtro y método para la compensación del desfase introducido por la limitación de pendiente de un actuador. La presente invención, se refiere a un filtro para compensar el desfase debido a la velocidad máxima de respuesta en un actuador. La salida compensada (y) corresponde a la salida del filtro , y se obtiene de un limitador de pendiente convencional que puede ser alimentado por dos señales dependiendo del valor absoluto de la derivada de la señal de entrada (v). - Si el módulo de la derivada de la señal de entrada (v) supera un valor umbral, entonces, la señal aplicada al limitador de pendiente convencional es la señal resultante de sumar la señal de salida (y) con la derivada respecto al tiempo de una señal de error ({ep}). A su vez, dicha señal de error ({ep})…
Procedimiento y dispositivo para la compensación de fase en el sistema de control de un vehículo de motor.
(16/09/2002) Un sistema de control de un vehículo para proporcionar una señal de salida (y) que tiene un derivado temporal que está limitado en relación con un derivado temporal de una señal de la entrada (u),si el derivado temporal para la señal de entrada (u) excede de un valor predeterminado y para una fase compensante la señal de salida (y) en relación con la señal de entrada (u), caracterizado por el hecho de que el sistema de control comprende una segunda señal de error que forma medios para formar una señal de error éntre la señal desalida (y)yla señal de entrada (u). los medios de la amplificación que generan un factor k que depende de la amplitud de la segunda señal de error los medios de diferenciación (S, 6) para diferenciar la señal de entrada (u), un…
UNIDAD DIGITAL DE CONTROL PARA PROCESOS DEFINIDOS POR SEÑALES DE VARIACION LENTA.
(16/11/1985). Solicitante/s: CONSEJO SUPERIOR INVESTIGACIONES CIENTIFICAS.
UNIDAD DE CONTROL DE VARIABLES DE VARIACION LENTA REGULADA ALREDEDOR DE UN PUNTO CONSIGNA. CONSISTE EN: UN MODULO DETECTOR DE ERRORES CONSTITUIDO POR TRES BUFFER (BUF) ACTIVADOS POR LA SEÑAL FINAL DE CONVERSION (FC) DEL CONVERTIDOR A/D QUE ALMACENA EN ELLOS EL ULTIMO VALOR CONVERTIDO Y LO MANTIENE MIENTRAS EL RESTADOR DIGITAL (RD) REALIZA EN CONTINUO LA DIFERENCIA ENTRE LA VARIABLE DE ENTRADA Y LA DE CONSIGNA; UN MODULO CONVERSOR TENSION/VARIACION ANCHO DE PULSO CONSTITUIDO POR UN CONTADOR HACIA ABAJO (CHA), UN DECODIFICADOR DE (DEO), UN CIRCUITO DE CONTROL (UC) CONT UN RELOJ PROGRAMABLE (RP) Y UN TEMPORIZADOR (TEMP); Y UN MODULO SELECTOR DE ACTUACION CONSTITUIDO POR UN CIRCUITO DE OBTENCION DE SIGNOS (SIGN) Y UN CIRCUITO DE MEMORIA (FF/T).
{kind=link}