CIP-2021 : G05D 1/02 : Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/02[1] › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
CIP2021: Invenciones publicadas en esta sección.
Robot de cobertura autónoma.
(17/05/2017) Un robot móvil que comprende:
un cuerpo de robot dotado de una dirección de impulsión de avance;
un sistema de impulsión que soporta el cuerpo del robot por encima de una superficie de suelo para maniobrar el robot a través de la superficie de suelo ;
una placa de circuito principal en comunicación con el sistema de impulsión ;
un bastidor de parachoques que define una forma complementaria de una periferia frontal del cuerpo del robot, estando el bastidor del parachoques soportado por el cuerpo del robot; y
un sistema sensor de obstáculos dispuesto en el bastidor del parachoques,…
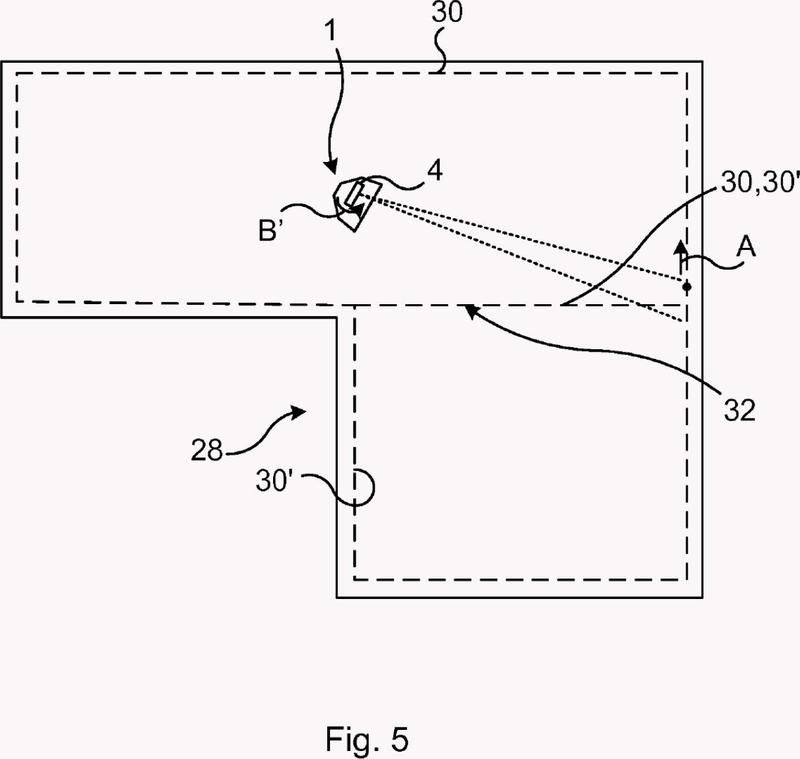
Instalación, en particular instalación de producción.
(26/04/2017) Instalación, en particular instalación de producción,
presentando la instalación máquinas, en particular máquinas dispuestas de manera estacionaria o de manera desplazable, y al menos un vehículo y un control,
caracterizada porque
el vehículo presenta al menos un sensor para la determinación de la posición relativa de una persona, en particular un sensor para la determinación de la distancia entre el vehículo y la persona así como para la determinación del ángulo entre la dirección de desplazamiento del vehículo y la línea de unión entre la persona y el vehículo,
presentando el vehículo un medio de registro de posición para registrar la posición del vehículo, en particular un sistema de GPS o un sistema de triangulación para la determinación…
Procedimiento y dispositivo de control para el control de un vehículo.
(12/04/2017). Solicitante/s: DEUTSCHE BAHN AG. Inventor/es: RODE,OLIVER.
Procedimiento para el control de un vehículo, el cual está equipado con una cámara digital y un sistema de procesamiento de imagen óptico , estando configurado el sistema de procesamiento de imagen óptico para la detección y la evaluación de un código legible mediante máquina dispuesto sobre un plano de soporte bidimensional, caracterizado por que en un primer paso de procedimiento a partir de las imágenes del código detectadas por la cámara digital se determina mediante el sistema de procesamiento de imagen la posición espacial tridimensional del plano de soporte del código en relación con el vehículo, y basándose en ello se determinan en un segundo paso de procedimiento mediante una unidad de control conectada con el sistema de procesamiento de imagen, magnitudes de control para la navegación del vehículo en dirección hacia el código.
PDF original: ES-2668660_T3.pdf
Método de readaptación y de seguimiento de líneas virtuales para vehículos autónomos.
(30/03/2017) Método de readaptación o mejora de un vehículo automático seguidor de líneas y de adición de la capacidad de seguir una trayectoria virtual teórica , presentando el vehículo un sensor de línea , unos accionadores de movimiento , y una unidad de accionamiento , recibiendo la unidad de accionamiento una señal del sensor de línea y estando adaptada para accionar los accionadores , de tal manera que mantengan la línea en medio del sensor de línea ; incluyendo el método: proporcionar una unidad de localización dispuesta para determinar la posición o la postura del vehículo (x, y, ϑ ); proporcionar una unidad de seguimiento de trayectorias dispuesta…
Método y sistema para generar un horizonte para utilizar en un sistema avanzado de asistencia al conductor (ADAS).
(22/03/2017) Un método para generar un horizonte para utilizar en un Sistema Avanzado de Asistencia al Conductor (ADAS) de un vehículo, que comprende:
obtener datos representativos de una ruta precalculada a ser recorrida por el vehículo;
determinar un camino de salida más probable que se pueda esperar que el vehículo recorra en el futuro inmediato en un punto de decisión, en donde el camino más probable es el camino de salida que corresponde a una parte de la ruta precalculada;
utilizar uno o más de entre: datos digitales basados en la localización, datos del vehículo y datos del conductor almacenados para determinar datos…
Sistema de control de trayectoria.
(22/02/2017) Sistema para controlar, a partir de una trayectoria de un primer vehículo, un segundo vehículo para que siga una trayectoria complementaria, comprendiendo el sistema:
* un primer subsistema de vehículo que tiene:
* una memoria para coordenadas de tiempo (T) y posición (X, Y) de la trayectoria del primer vehículo;
* un receptor GPS para determinar coordenadas de tiempo (T) y posición (X, Y) real del primer vehículo,
* medios para comparar la posición real del primer vehículo con una posición de trayectoria en tiempos determinados como errores de trayectoria de prueba y
* medios para transmitir los errores de trayectoria de prueba y
* un segundo subsistema de vehículo que tiene:
* una memoria para coordenadas de tiempo…
(08/02/2017). Solicitante/s: IROBOT CORPORATION. Inventor/es: SANDIN,PAUL E, Campbell,Tony L, HALLORAN,Michael J, MAMMEN,Jeffry W, WALKER,Jason S, BILLINGTON,John N. JR, OZICK,DANIEL M.
Un robot que comprende:
un controlador ;
un radio receptor configurado para recibir contenido audible mediante una transmisión inalámbrica;
una memoria configurada para almacenar el contenido audible;
un altavoz configurado para emitir el contenido audible; e
indicaciones capaz de ser controladas mediante el controlador y configuradas para indicar información de funcionamiento en un primer modo; e
indicar información ilustrativa en coordinación con el contenido audible en un segundo modo;
en donde el segundo modo corresponde a un modo de entrenamiento, donde el altavoz emite un programa instructivo de entrenamiento audible, y donde en el segundo modo, el robot muestra las indicaciones según un patrón de entrenamiento en coordinación sincronizada con el contenido audible, en donde el contenido audible contiene un programa instructivo/de entrenamiento.
PDF original: ES-2623920_T3.pdf
Sistema, dispositivo y método de guiado por láser óptico.
(04/01/2017) Un sistema de guiado por láser óptico para uso con un vehículo, que comprende:
un sensor de láser montable en dicho vehículo para detectar una posición de un haz de láser proyectado desde una fuente remota y que genera en respuesta una señal de posición;
un actuador de accionamiento
del vehículo;
un controlador conectado al sensor de láser y conectado al actuador de accionamiento del vehículo, para recibir la señal de posición y controlar el actuador de accionamiento del vehículo en respuesta a que el haz de láser sea más grande que una distancia predeterminada desde la posición de referencia,
caracterizado porque
el sensor…
Un procedimiento de localización de un robot en un plano de localización.
(30/11/2016) Un procedimiento de localización de un robot en un plano de localización asociado con una referencia bidimensional con dos ejes x e y que comprende las siguientes etapas:
- determinar por odometría una estimación de las coordenadas x1 e y1 del robot en el plano de localización, así como una estimación de su orientación θ1 relativamente a una dirección de referencia;
- determinar una estimación θ2 de la orientación del robot mediante el uso de una brújula virtual que identifica al menos dos pares de puntos de interés, siendo identificados los primeros puntos de cada par en un panorama de referencia y siendo identificado un segundo punto de cada par en un panorama…
SISTEMA DE MONITOREO PARA ANTICIPAR CONDICIONES DE PELIGRO DURANTE EL TRANSPORTE DE UNA CARGA POR VIA TERRESTRE.
(17/11/2016). Solicitante/s: GONZÁLEZ MÉNDEZ, Pedro Renato. Inventor/es: GONZÁLEZ MÉNDEZ,Pedro Renato.
La invención se refiere a un sistema de monitoreo para anticipar condiciones de peligro durante el transporte de una carga por vía terrestre que comprende un aparato y método para la detección y notificación de inestabilidad y riesgo de vuelco de una carga. Esta invención mide, registra y analiza la dinámica física de una carga transportada vía terrestre y genera alarmas anticipativas especificas de condiciones de riesgo de inestabilidad y de vuelco asociadas a la ruta por la cual se desplaza un vehículo; estas alarmas generadas por el equipo de medición, las despliega en la cabina del mismo vehículo para que el conductor realice acciones que aminoren la condición de riesgo y de esta forma se eviten accidentes o condiciones de riesgo. Esta tecnología presenta una configuración modular y permite su instalación en cualquier vehículo.
SISTEMA DE GUIADO AUTOMATICO DE VEHICULOS POR MEDIO DE CAMBIOS DIELECTRICOS EN UN CARRIL-GUIA PREGRABADO.
(17/11/2016). Solicitante/s: AUTO DRIVE SOLUTIONS S.L. Inventor/es: BADOLATO MARTIN,Alejandro.
Sistema de guiado automático de vehículos por medio de la detección de cambios de las propiedades dieléctricas en un carril-guía pregrabado, donde los cambios dieléctricos son detectados por un dispositivo radar de alta resolución y donde el sistema de control del vehículo dispone de los medios auxiliares necesarios para convertirlo en un sistema de guiado automático caracterizado porque el sistema se encuentra constituido por los siguientes elementos:.- carril-guía pregrabado .- dispositivo de lectura de la información.- medios auxiliares de control del vehículo.
Dispositivo robótico de limpieza con función de registro del perímetro.
(26/10/2016). Ver ilustración. Solicitante/s: AKTIEBOLAGET ELECTROLUX. Inventor/es: HAEGERMARCK, ANDERS, LINDHÉ,MAGNUS, FORSBERG,PETTER.
Un método para enseñar un perímetro de un área de interés a un dispositivo robótico de limpieza , que comprende los pasos de:
- situar (S01) el dispositivo robótico de limpieza de modo que un dispositivo de detección de obstáculos del dispositivo robótico de limpieza pueda monitorizar al menos parte del área ;
- controlar (S02) el dispositivo de detección de obstáculos del dispositivo robótico de limpieza para hacer un seguimiento y registrar de manera continua una posición de un objeto , mientras el objeto se mueve a lo largo del perímetro del área de interés; y
- crear (S03) los datos posicionales del perímetro a partir de los registros continuos de las posiciones del objeto.
PDF original: ES-2656664_T3.pdf
Método para la operación de un buque oceánico no tripulado.
(26/10/2016) Método para conducir un buque oceánico no tripulado , donde el buque comprende un casco , una vela de ala autosujeta para propulsión, una quilla para estabilidad de la dirección, y un timón ,
caracterizado por los pasos:
- ajustar el timón y la vela para que el recipiente mantenga una dirección estable con respecto al viento en una desviación del timón dada,
a) - para verificar la posición del buque con la ayuda de un sistema de conducción electrónico a bordo, y si está registrado que el buque no se acerca más a su destino,
b) - ajustar el timón para establecer un nuevo, curso arbitrario, donde el curso se selecciona entre un numero de cambios de curso…
EQUIPO ROBOTIZADO PARA LA LOCALIZACIÓN DE ARTÍCULOS EN UNA TIENDA Y SU PROCEDIMIENTO DE FUNCIONAMIENTO.
(10/10/2016). Solicitante/s: Tier1 Technology, S.L. Inventor/es: BORDONS ALBA,CARLOS, FERNANDEZ CAMACHO,EDUARDO, RIDAO CARLINI,Miguel Ángel, HERNÁNDEZ RODRÍGUEZ,Gonzalo, RUBIO GONZÁLEZ, Francisco Javier, CORDERO AMARILLO,José Luis.
Equipo robotizado para la localización de artículos en una tienda y su procedimiento de funcionamiento.
Equipo robotizado para la localización de artículos en coordenadas XYZ en una tienda que consta de un robot móvil y puede comprender opcionalmente un ordenador externo conectado por vía inalámbrica con el robot , que a su vez está formado por un sistema de visión artificial , un sistema de barrido y detección de obstáculos , un sistema de lectura de etiquetas activas con señales ópticas y/o electromagnéticas , un sistema de desplazamiento formado por al menos dos ruedas motrices, una batería y un controlador que comprende una placa principal con un sistema operativo de código abierto, estando conectado dicho controlador con los diferentes sistemas que conforman el robot y estando configurado para recibir datos de dichos sistemas y procesarlos con objeto de crear un mapa de la tienda y determinar la ubicación de cada artículo en la tienda.
PDF original: ES-2585977_B1.pdf
PDF original: ES-2585977_A1.pdf
Estación de carga para vehículo utilitario de navegación autónoma.
(28/09/2016) Una estación de carga para cargar una batería instalada en un vehículo utilitario de navegación autónoma equipado con un primer motor accionado por la batería para desplazarse por una zona de trabajo (AR) delimitada por un cable de límite con el fin de realizar trabajo de forma autónoma, incluyendo la estación de carga un par de terminales de carga instalados en la estación espaciados uno de otro mediante un punto medio, siendo capaz el par de terminales de carga de conectar con un par de terminales de carga instalados en el vehículo ; caracterizada por:
un primer cable instalado en la estación en una posición dentro o fuera de la zona de trabajo (AR) y estando formado como una forma circular que tiene un centro (P0), estando adaptado el primer cable para generar un campo magnético para guiar…
(14/09/2016). Solicitante/s: IROBOT CORPORATION. Inventor/es: MAMMEN,JEFFREY W, SANDIN,PAUL E, Ozick,Daniel N, Campbell,Tony L, DUBROVSKY,ZIVTHAN A, JONES,JOSEPH L, COHEN,DAVID A, LEWIS JR.,DAVID M, VU,CLARA, PRENETA,JOSHUA B, GILBERT,DUANE L, BERGMAN,JOHN.
Un cortacésped robot que comprende:
un cuerpo ;
un sistema de accionamiento transportado por el cuerpo y configurado para maniobrar el robot a lo largo del césped;
un controlador transportado por el cuerpo y en comunicación con el sistema de accionamiento ; al menos un sensor de obstáculos transportado por el cuerpo y configurado para detectar un obstáculo potencial próximo al robot;
en donde el controlador se configura para funcionar en un modo de configuración de control en el cual un usuario maniobra el robot para circunnavegar y acercarse a límites, obstáculos y/o áreas resguardadas marcadas mientras el robot se encuentra en un modo manual y permitir el funcionamiento del robot en un modo autónomo solo después de haber completado el modo de configuración de control,
caracterizado por que el sistema de accionamiento se configura para dirigir el robot a una velocidad más rápida durante el modo manual que en el modo autónomo.
PDF original: ES-2654513_T3.pdf
Aparato y método para el tratamiento de piezas estructurales.
(17/08/2016) Un aparato para modificación o tratamiento de una pieza estructural durante su fabricación, siendo la pieza estructural una parte o un todo de una pala de turbina eólica, que comprende:
un vehículo guiado automático adaptado para moverse detectando una trayectoria predeterminada y dirigiendo el vehículo para que se mueva a lo largo de la trayectoria predeterminada;
un portal montado sobre el vehículo guiado automático de manera que una pieza estructural pasa a través del portal cuando el vehículo se mueve a lo largo de la trayectoria predeterminada ;
una o más herramientas montadas sobre el portal para modificar o tratar la pieza estructural a medida que el vehículo se mueve a lo largo de la trayectoria…
Procedimiento y sistema de cobertura plurimodal para un robot autónomo.
(10/08/2016) Un robot móvil, que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
teniendo dicho sistema de control un comportamiento de cobertura, en el que el sistema de control alterna en un ciclo entre un modo de seguimiento de obstáculos, en el que el robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, en el que el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
caracterizado por que el sistema de control está configurado de modo que haga funcionar el robot en una pluralidad de comportamientos que incluyen…
(10/08/2016) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento; en el que
dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, mediante el cual el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen…
(27/07/2016). Solicitante/s: EUROFILTERS HOLDING N.V. Inventor/es: SAUER, RALF, SCHULTINK, JAN.
Robot aspirador , que comprende una boquilla de suelo alojada sobre ruedas y una unidad de acumulación de polvo , en el que la boquilla de suelo presenta un dispositivo de accionamiento , para accionar al menos una de las ruedas de la boquilla de suelo, presentando la boquilla de suelo una placa de suelo con una superficie base, que en el funcionamiento del robot aspirador está dirigida a la superficie que va a limpiarse, presentando la placa de suelo en paralelo a la superficie base un canal de corriente de aire , a través del cual entra el aire que va a limpiarse en la boquilla de suelo, caracterizado por que una de las ruedas, varias o todas la ruedas de la boquilla de suelo son ruedas omnidireccionales y la boquilla de suelo comprende un dispositivo giratorio para girar el canal de corriente de aire alrededor de un eje perpendicular a la superficie base.
PDF original: ES-2622375_T3.pdf
(27/07/2016). Solicitante/s: EUROFILTERS HOLDING N.V. Inventor/es: SAUER, RALF, SCHULTINK, JAN.
Robot aspirador , que comprende una unidad colectora de polvo montada sobre ruedas , una manguera aspiradora y una tobera de suelo montada sobre ruedas , en el que la tobera de suelo está en comunicación de fluido, a través de la manguera aspiradora, con la unidad colectora de polvo, que comprende además una unidad de ventilador con motor para aspirar un flujo de aire mediante la tobera de suelo,
presentando la unidad colectora de polvo un dispositivo de accionamiento , para accionar al menos una de las ruedas de la unidad colectora de polvo, y
presentando la tobera de suelo un dispositivo de accionamiento , para accionar al menos una de las ruedas de la tobera de suelo;
caracterizado porque
la unidad de ventilador con motor está dispuesta entre la tobera de suelo y la unidad colectora de polvo de tal manera que un flujo de aire aspirado por la tobera de suelo fluye a través de la unidad de ventilador con motor hacia el interior de la unidad colectora de polvo.
PDF original: ES-2619192_T3.pdf
Vehículo de marcaje y método.
(20/07/2016). Solicitante/s: Beamrider Limited. Inventor/es: WALSER,BERND, NICHOLLS,JEREMY, KIPFER,PETER, BETSCHON,CHRISTIAN, MCGUFFIE,IAIN.
Un vehículo de marcaje, controlable por un operador, que comprende:
- una unidad dispensadora (1a, 1b, 1c, 1d, 1e, 1f, 1g, 1h, 1i, 1j) con una salida para una sustancia marcadora para generar una marca fijada al suelo (M, M'), especialmente de un campo de deportes (SF), a lo largo de una línea de marcado deseada,
un dispositivo de bombeo para transportar la sustancia de marcado a la salida, y
una unidad de control de dispensación para proporcionar instrucciones para la unidad dispensadora (Ia, Ib, Ic, Id, Ie, If, Ig, Ih, Ii, Ij),
caracterizado en que
el vehículo de marcaje comprende un dispositivo actuador para un desplazamiento definido de la salida, transversalmente a la dirección de desplazamiento del vehículo de marcado, basándose en dichas instrucciones de control, donde las desviaciones en la posición transversal de la salida de dicha línea de marcado deseada, se pueden corregir el mencionado desplazamiento definido, de manera continua.
PDF original: ES-2662843_T3.pdf
Dispositivo y método para optimizar el movimiento de vehículos de guiado automático.
(01/06/2016) Dispositivo para optimizar el movimiento de vehículos de guiado automático, que comprende un módulo de gestión de tráfico para gestionar el movimiento de algunos vehículos de guiado automático (AGV1, AGV2, AGV3, ..., AGVn) a lo largo de rutas de un gráfico definido por segmentos y nodos para conectar los segmentos, estando indicados dichos vehículos de guiado automático por un número v, donde v indica el vehículo actual, siendo v ≥ 1, 2, ..., V, estando indicados dichos nodos mediante un número n, donde n indica el nodo actual, siendo n ≥ 1, 2, ..., N, de acuerdo con períodos de tiempo t, y donde t ≥ 1, 2, ..., T es el período de tiempo actual, donde el dispositivo comprende un módulo de resolución conectado a, y en comunicación con, el módulo de gestión de…
(25/05/2016) Un método para determinar una ruta para un vehículo , comprendiendo el método:
proporcionar una posición de partida para el vehículo ;
proporcionar una posición final deseada para el vehículo ; y
utilizar la posición de partida proporcionada y la posición final deseada, realizando, mediante uno o más procesadores , un proceso de optimización para determinar una posición para cada punto de la ruta de acceso en una secuencia ordenada de puntos de la ruta (P1 - Pn), proporcionando de este modo la ruta para el vehículo definida por la secuencia ordenada de puntos de la ruta (P1 - Pn), en donde
realizar el proceso de optimización comprende:
…
(25/05/2016) Un procedimiento para determinar una ruta para un vehículo , comprendiendo el procedimiento:
medir, mediante un aparato de medición , la posición del vehículo ;
proporcionar, para su utilización por uno o varios procesadores , una especificación de un área a la que se tiene que desplazar el vehículo ; y
utilizando las mediciones y la especificación del área , llevar a cabo, mediante dichos uno o varios procesadores , un proceso de determinación de ruta para determinar la ruta para el vehículo , en el que el proceso de determinación de ruta comprende:
construir un grafo dentro de un espacio de estados (X) del vehículo , comprendiendo el grafo una serie de vértices y uno o varios bordes que conectan dichos vértices;
identificar, dentro del grafo construido , un trayecto desde un primer vértice del grafo …
(25/05/2016) Método de determinación de rutas para al menos dos vehículos , comprendiendo el método:
medir, mediante un equipo de medida , una posición de un primer vehículo ;
medir, mediante el equipo de medida, una posición de un segundo vehículo ;
proporcionar, para uso por uno o varios procesadores , una especificación de una región , teniendo la región una posición fija con relación al primer vehículo;
usar las medidas y la especificación de la región, realizando, por parte del o de los procesadores, un proceso de determinación de rutas para determinar una primera ruta para el primer vehículo y una segunda ruta para el segundo vehículo ; en que…
Unión articulada disociable entre dos módulos de carretera sucesivos de un tren de carretera.
(04/05/2016) Unión articulada disociable entre dos módulos de carretera de un tren de carretera formado por una pluralidad de módulos de carretera sucesivos motorizados de los que al menos un módulo de carretera conductor y un módulo de carretera seguidor presentan cada uno en la parte delantera un árbol director, que comprende
- un conjunto de unión disociable y de orientación que comprende un dispositivo de enganche y unos medios de asociación y de disociación rápidos y tal que
- el dispositivo de enganche es una pieza de timón que lleva el módulo seguidor debajo de su parte delantera y montada pivotante con respecto a su estructura e independiente en rotación de su denominado árbol director, así como fija en orientación con respecto…
Dispositivo de máquina de construcción y método de fresado de una superficie del terreno.
(20/04/2016) Un dispositivo de máquina de construcción, que comprende:
una pluralidad de soportes (12A, 12B) de conexión al terreno;
un bastidor de la máquina soportado desde los soportes (12A, 12B) de conexión al terreno;
un tambor de fresado apoyado desde el bastidor de la máquina;
un sistema de detección de la posición del tambor de fresado configurado para determinar una posición de tambor del tambor de fresado en un sistema de referencia externo (X, Y, Z);
caracterizado porque la máquina de construcción además comprende un sistema indicador de la posición, incluyendo:
una memoria configurada para almacenar información que identifica una posición de una zona (A) que ha de ser evitada…
Manejo de unidades de datos en paquetes.
(13/04/2016). Solicitante/s: Nokia Technologies OY. Inventor/es: SALOKANNEL, JUHA, SYRJÄRINNE,JARI TAPANI.
Un método que comprende:
proporcionar una primera unidad de datos en paquetes para transmisión como parte de un primer paquete de anuncio de baja energía de Bluetooth, incluyendo la primera unidad de datos en paquetes:
un primer indicador que indica el uso de un primer sistema de coordenadas, en donde el primer indicador indica si el primer sistema de coordenadas es un sistema de coordenadas global, que relaciona una localización con una referencia global, o un sistema de coordenadas local, que define la localización con respecto a un origen; y
primeros datos que indican una localización, indicando los primeros datos la localización usando una referencia global si el primer sistema de coordenadas es un sistema de coordenadas global, o usando un origen si el primer sistema de coordenadas es un sistema de coordenadas local; y
provocar la transmisión del primer paquete de anuncio de baja energía de Bluetooth que incluye la primera unidad de datos en paquetes.
PDF original: ES-2644842_T3.pdf
Robot autónomo de cubrimiento compacto.
(08/03/2016) Robot autónomo de cubrimiento que comprende:
un chasis que tiene partes delantera y posterior , definiendo la parte delantera una forma sustancialmente rectangular y definiendo la parte posterior una forma arqueada;
un sistema de accionamiento portado por el chasis configurado para maniobrar el robot sobre una superficie de limpieza;
ruedas motrices accionadas de manera diferencial derecha e izquierda ;
un conjunto de limpieza montado en la parte delantera del chasis ;
un compartimento de basura dispuesto adyacente al conjunto de limpieza y configurado para recibir residuos agitados por el conjunto de limpieza ;
un sensor antichoque configurado para detectar movimiento en múltiples direcciones;
caracterizado por que…
Sistema y método para probar tecnologías de prevención de accidentes.
(02/03/2016) Un sistema de Objetivo Blando Guiado (OBG) que comprende:
un vehículo objeto (VO) con un sensor de posición de VO y un sensor de velocidad de VO;
un elemento de movimiento dinámico (EMD) con un sensor de posición de EMD en que el EMD comprende un cuerpo que comprende una superficie superior en que la superficie superior está adaptada para soportar un cuerpo blando que tiene el tamaño y la forma de un vehículo o de una parte de un vehículo, en que el cuerpo tiene al menos un lado cónico de manera que permite que el vehículo objeto avanzar hasta y sobre la superficie superior con un daño mínimo o ningún…
Aparato para controlar un vehículo utilitario que navega de forma autónoma.
(02/03/2016) Un aparato para controlar la operación de un vehículo utilitario que navega de forma autónoma adaptado para recorrer una zona de trabajo definida por un alambre de limitación tendido para realizar el trabajo de manera autónoma, que comprende:
una pareja de sensores magnéticos instalados a cada lado del vehículo en posiciones lateralmente simétricas con respecto a una línea central de dirección hacia adelante recta del vehículo , para producir salidas que indican intensidad del campo magnético del alambre de limitación ;
un sensor de velocidad angular adaptado para producir una salida que indica velocidad angular alrededor de un eje vertical del vehículo , cuando el vehículo gira, en el que un valor integrado en el tiempo de la…
{kind=link}