CIP-2021 : G05D 1/00 : Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres,
acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
CIP-2021 › G › G05 › G05D › G05D 1/00[m] › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G05D 1/03 · · que utilizan sistemas de transmisión por proximidad de campo, p. ej. del tipo de bucle inductivo.
G05D 1/04 · Control de la altitud o de la profundidad.
G05D 1/06 · · Régimen de modificación de la altitud o de la profundidad.
G05D 1/08 · Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
G05D 1/10 · Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
G05D 1/12 · Control para la búsqueda de un objetivo.
CIP2021: Invenciones publicadas en esta sección.
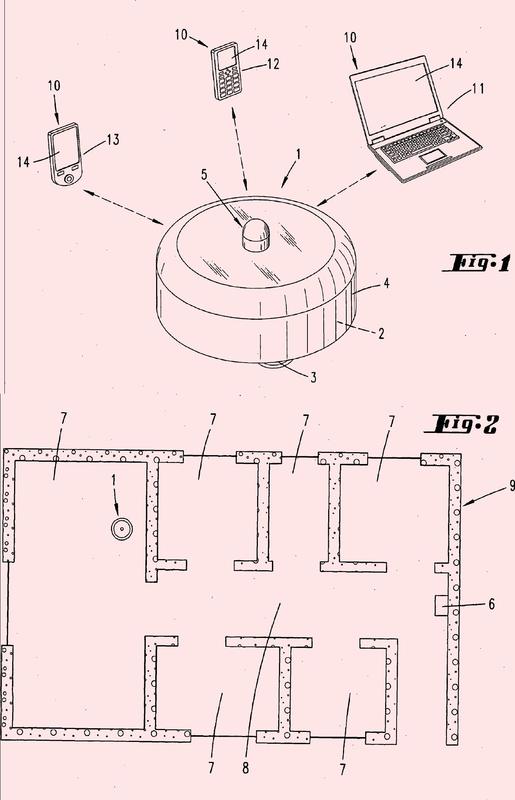
Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable.
(27/01/2016) Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable , con los pasos de
- creación de un mapa de la habitación,
- almacenamiento del mapa de la habitación dentro de una memoria de datos,
- selección de una zona parcial de la habitación mediante la toma de una foto de la zona parcial por un usuario,
- transmisión de los datos locales de la zona parcial seleccionada a un ordenador conectado a la memoria de datos,
- comparación de los datos locales de la zona parcial seleccionada con los datos locales contenidos en el mapa para la identificación de la zona parcial por medio del ordenador y
- limpieza o tratamiento de la habitación…
Procedimiento de funcionamiento de un robot de limpieza.
(23/12/2015). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: MEYER, FRANK, SCHLISCHKA, PATRICK, SAUERWALD,ANDRES, WALLMEYER,MARIO.
Procedimiento de funcionamiento de un robot de limpieza , preferiblemente un robot barredor y/o aspirador, en el que el robot está preparado para captar locales en forma de un mapa, con miras a trasladar el robot sobre el suelo de uno o varios recintos (10 a 15), y en el que el robot dispone también de medios sensores para determinar la posición dentro de un recinto (10 a 15) así captado, caracterizado por que el robot puede hacerse funcionar discrecionalmente para el procesamiento de una superficie en virtud de una captación automática de un local (10 a 15) y también para el procesamiento de una superficie que ha sido ingresada previamente por un recorrido de autoinstrucción de los límites de dicha superficie, pudiendo realizarse en ambos casos, durante un procesamiento de una superficie, una comprobación del trayecto prefijado con ayuda de los límites del recinto actualmente captados.
PDF original: ES-2558331_T3.pdf
Procedimiento para el control de un robot.
(18/12/2015). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: KEMKER, UWE, SCHLISCHKA, PATRICK, WALLMEYER,MARIO.
Procedimiento para el control de un robot , con preferencia de un robot de barrar y/o de aspirar desplazable de forma autónoma, en el que en el robot se crea y se registra un mapa del entorno o bien de una vía de desplazamiento predeterminada, en el que, además, un aparato exterior actúa para el control sobre el robot , se transmite el mapa fuera del robot sobre el aparato exterior y se representa la posición del robot dentro del mapa , caracterizado por que el mapa del entorno se crea en el aparato exterior y el mapa creado de esta manera se transmite al robot.
PDF original: ES-2554381_T3.pdf
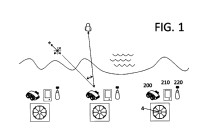
(01/10/2015). Ver ilustración. Solicitante/s: UNIVERSIDAD DE HUELVA. Inventor/es: ANDUJAR MARQUEZ,JOSE MANUEL, MEJÍAS BORRERO,Andrés, MÁRQUEZ SÁNCHEZ,Marco Antonio, SÁNCHEZ HERRERA,María Reyes.
Sistema de salvamento, para emergencias próximas a la costa, con al menos un dispositivo robotizado volador, RPAS (drone, multicóptero,... ); un subsistema cliente de salvamento que identifica la posición de la emergencia y transmite las coordenadas al RPAS , el cual posee un subsistema de dispositivos de vuelo que gestiona su traslado al punto de emergencia y la liberación de la carga de socorro, y un subsistema de comunicaciones , por ejemplo inalámbrico, entre ambos. La posición de la emergencia se puede calcular a partir de las medidas de acimut y distancia, calculadas por unos prismáticos de observación . El RPAS puede comprender una videocámara , altavoz o luces estroboscópicas 160.
DISPOSITIVO AUTÓNOMO DE VISUALIZACIÓN EN VEHÍCULOS MÓVILES.
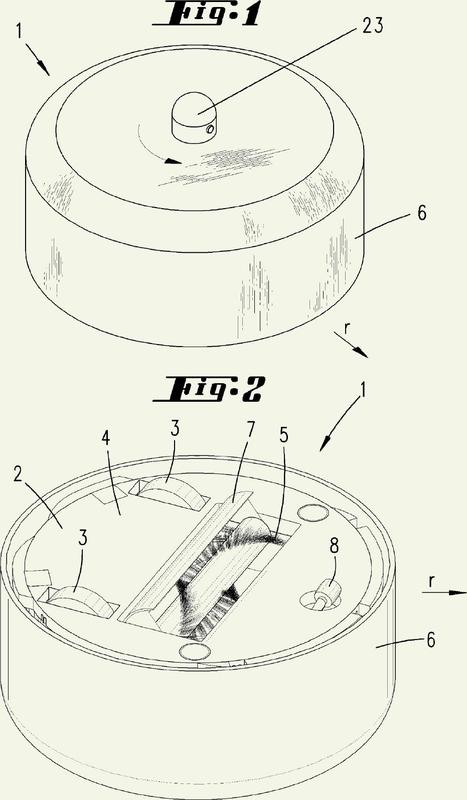
(03/09/2015) El dispositivo se constituye a partir de una base con una turbina protegida y parcialmente oculta por una tapa , incorporando además un elemento de captación de imágenes , representado en esta implementación preferida por una cámara, formando todo ello un conjunto de reducidas dimensiones previsto para su aplicación y fijación sobre la superficie externa de un vehículo móvil, y más concretamente en una implementación preferida, en el fuselaje de un avión, de manera que el giro de la turbina por el movimiento del vehículo (avión) lleva consigo la generación de energía electromagnética, la carga de la batería así como la alimentación eléctrica de sensores , generador de radiofrecuencia, y una electrónica de control para conseguir almacenar información y procesado de los sensores de imagen…
Dispositivo autónomo de visualización en vehículos móviles.
(28/08/2015) Dispositivo autónomo de visualización en vehículos móviles.
El dispositivo se constituye a partir de una base con una turbina protegida y parcialmente oculta por una tapa , incorporando además un elemento de captación de imágenes , representado en esta implementación preferida por una cámara, formando todo ello un conjunto de reducidas dimensiones previsto para su aplicación y fijación sobre la superficie externa de un vehículo móvil, y más concretamente en una implementación preferida, en el fuselaje de un avión, de manera que el giro de la turbina por el movimiento del vehículo (avión) lleva consigo la generación de energía electromagnética, la carga de la batería así como la alimentación eléctrica de sensores , generador de radiofrecuencia, y una electrónica de control…
ESTRUCTURA PARA DESPLAZAMIENTO SINCRONIZADO DE CORREAS TRANSPORTADORAS UTILIZANDO GPS.
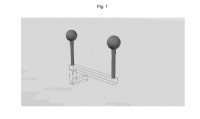
(27/08/2015). Ver ilustración. Solicitante/s: SITECH SOUTHERN CONE SPA. Inventor/es: BASCHMANN,Juan Francisco, SALGADO SEPÚLVEDA,Cristóbal.
La invención provee una estructura de sistema georreferencia adosada a un cabezal para el transporte sincronizado de una correa transportadora mediante una pluralidad de máquinas autopropulsadas, que comprende una pluralidad de vigas, con al menos una viga inferior, unida al cabezal mediante una pluralidad de medios de sujeción, una segunda viga fijada en un extremo de la viga inferior, una placa de soporte fijada en un extremo superior de la segunda viga, que soporta una viga superior, sobre la cual se monta al menos dos antenas GPS, cada una ubicada en una proximidad de cada uno de los extremos de la viga superior.
Dispositivo de aplicación externa en vehículos móviles para conseguir energía eléctrica.
(06/08/2015) Dispositivo de aplicación externa en vehículos móviles para conseguir energía eléctrica.
El dispositivo se constituye a partir de una base con una turbina protegida y parcialmente oculta por una tapa , incorporando además la base un elemento de señalización, formando todo ello un conjunto de reducidas dimensiones previsto para su aplicación y fijación sobre la superficie externa de un vehículo móvil, y más concretamente en una implementación preferida, en el fuselaje de un avión destinado al repostaje con un segundo avión, de manera que el giro de la turbina por el movimiento del vehículo (avión) lleva consigo la generación de energía electromagnética, la carga de la batería y el encendido del elemento de señalización , así como la alimentación eléctrica de sensores , generadores luminosos…
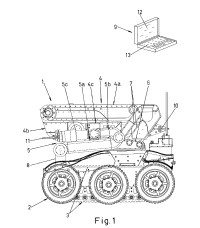
Vehículo robotizado telecomandado.
(10/07/2015) Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta…
Procedimiento y sistema de guiado para la recolección automática de producto hortícola basado en modelado digital 3D.
(10/07/2015) Procedimiento y sistema de guiado para la recolección automática de producto hortícola basado en modelado digital 3D.
La invención consiste en un procedimiento para la selección de productos hortofrutícola que comprende la creación de un modelo 3D así como un sistema para el guiado de un manipulador robótico para la recolección de productos hortícolas que lleva a cabo dicho procedimiento de selección.
Ayuda de seguimiento fino para un operario utilizando entradas obtenidas por sensor.
(24/06/2015) Un sistema de ayuda a un operario en un seguimiento fino, en la realización de una tarea de control para controlar el desplazamiento de un objeto hacia un blanco, que comprende:
un componente de entrada para combinar una entrada de operario para guiar el objeto hacia el blanco con una entrada obtenida por sensor en base a una medición de sensor de la posición del objeto con respecto a la posición del blanco;
un componente de filtrado bajo/alto para separar la entrada combinada mediante el componente de entrada, en un contenido de baja frecuencia y un contenido de alta frecuencia, comprendiendo el componente de filtrado bajo/alto un filtro de paso bajo para filtrar…
Programa de límite de empuje modificado para el control de la asimetría de empuje.
(17/06/2015) Un método para limitar el empuje producido por un motor de un avión de múltiples motores que funciona con asimetría de empuje, que comprende:
calcular primer, segundo y tercer programas de límite de empuje para el motor basados en al menos información acerca de la fase de vuelo, posición de los flaps y peso del avión;
determinar sucesivos primeros límites de empuje de motor en el tiempo como una función de dicho primer programa de límite de empuje y una presión dinámica variable;
calcular sucesivos coeficientes de momento de guiñada debidos a una asimetría de empuje variable; determinar sucesivos segundos límites de empuje de motor en el tiempo como una función del al menos dicho segundo programa de límite de empuje y valores absolutos…
VEHÍCULO ROBOTIZADO TELECOMANDADO.
(28/05/2015). Ver ilustración. Solicitante/s: PROYTECSA SECURITY, S.L. Inventor/es: SALLEN ROSELLO,CESAR.
Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta para su desplazamiento respecto del eje longitudinal del vehículo, de manera que con los dos juegos de ruedas y los dos juegos de oruga se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazo articulados sujeta y manipula los objetos a examen.
Método y aparato para minimizar las cargas estructurales dinámicas de un avión.
(29/04/2015) Método para aliviar dinámicamente las cargas generadas en un avión por una perturbación de ráfaga, comprendiendo el método los pasos de:
detectar automáticamente una perturbación causada por una ráfaga en un avión en vuelo ;
generar automáticamente, cuando se detecta una perturbación causada por una ráfaga, comandos de control para superficies de control; y
aplicar los comandos de control para accionar las superficies de control;
caracterizado por
generar comandos de control usando una secuencia de comandos de control predeterminada que ha sido predeterminada en un paso de determinación de la secuencia de comandos de control previo para accionar dinámicamente las superficies de control de una manera dinámica prescrita para minimizar no sólo un primer pico de carga sino también un segundo pico de carga al menos,
en…
Procedimiento para la conducción autónoma en un túnel de lavado y automóvil correspondiente.
(11/03/2015) Procedimiento para la conducción autónoma de un automóvil en un túnel de lavado, caracterizado por:
- la detección de un pasillo del túnel de lavado,
- la detección de una posición de vehículo y una orientación de vehículo del automóvil con respecto al pasillo del túnel de lavado,
- la introducción automática (S2) del automóvil en el túnel de lavado en base a la posición de vehículo y la orientación de vehículo,
- la detención automática (S3) del automóvil en una posición de lavado,
- la recepción o determinación por el automóvil de una señal de fin que señala el final de una etapa de trabajo del túnel de lavado y
- la salida automática (S8) del automóvil…
Sistemas y métodos de canal de comunicaciones de emergencia para controlar un satélite.
(14/01/2015) Un sistema para controlar un satélite , que comprende:
un bus de datos ;
una carga útil acoplada al bus de datos, comprendiendo la carga útil un receptor de carga útil; un receptor primario acoplado al bus de datos;
un procesador acoplado al bus de datos, estando configurado el procesador para:
- recibir un primer comando desde el receptor primario a través del bus de datos,
- recibir datos de telemetría desde la carga útil a través del bus de datos,
- detectar un segundo comando procesando los datos de telemetría recibidos desde la carga útil, y
- ejecutar el segundo comando detectado.
Sistema y procedimiento de determinación de los parámetros operacionales de una aeronave y mejora de la operación de la aeronave.
(28/11/2014) Sistema y procedimiento de determinación de los parámetros operacionales de una aeronave y mejora de la operación de la aeronave.
Un procedimiento de identificación de variaciones en parámetros operacionales de una aeronave incluye procesar una trayectoria de la aeronave en cuatro dimensiones (4D) para un vuelo a lo largo de una ruta definida. El procedimiento también incluye determinar una intención de la aeronave correspondiente al vuelo a lo largo de la ruta definida, en base, al menos parcialmente, a un modelo de rendimiento de la aeronave generado por un predictor de trayectoria. Adicionalmente, el procedimiento incluye ajustar los parámetros de intención de tal modo que una trayectoria 4D calculada corresponda sustancialmente con la trayectoria de la aeronave 4D. El procedimiento incluye adicionalmente determinar un parámetro operacional…
Conjunto de piloto automático para una unidad naval.
(13/08/2014) Un conjunto de piloto automático para una unidad naval incluyendo al menos un elemento estabilizador o direccional de popa que gira alrededor de al menos un eje de articulación ; una unidad electrohidráulica dispuesta cerca de dicho elemento estabilizador o direccional de popa para girar el elemento estabilizador o direccional alrededor de dicho eje de articulación ; y al menos una unidad electrónica de control dedicada a dicha unidad electrohidráulica y alojada cerca de dicha unidad electrohidráulica ; caracterizándose el conjunto de piloto automático porque presenta una arquitectura distribuida e incluye además al menos un elemento…
Sistema para el transbordo de contenedores.
(25/06/2014) Sistema para el transbordo de contenedores, en el que se utilizan vehículos de transporte de contenedores sobre el suelo, montados sobre neumáticos y sin conductor y vehículos de transporte de contenedores sobre el suelo, montados sobre neumáticos y con conductor que transportan contenedores entre grúas pórtico de contenedores y un almacén de contenedores , caracterizado por que está prevista al menos una zona manual (B), en la que se utilizan sólo vehículos de transporte de contenedores sobre el suelo, montados sobre neumáticos y con conductor y por que está prevista al menos una zona automática (A), en la que se utilizan sólo vehículos de transporte de contenedores sobre el suelo, montados sobre neumáticos…
Vehículo portacontenedores ligado al suelo y provisto de neumáticos, que puede ser utilizado a elección sin o con conductor.
(09/04/2014) Un vehículo portacontenedores ligado al suelo y provisto de neumáticos, que puede ser utilizado a elección sin o con conductor, estando equipado el vehículo portacontenedores con un sistema de control que puede estar conectado operativamente con el accionamiento de traslación y/o la dirección y/o el sistema de freno para un modo sin conductor, que presenta medios para introducir y almacenar posibles rutas y una tarea de transporte, medios para detectar automáticamente la posición del vehículo en el espacio, medios para controlar el desplazamiento del vehículo portacontenedores en función de su posición en el espacio y de…
Control de un barco propulsado por chorro de agua.
(12/02/2014) Procedimiento para corregir el efecto negativo de una alteración sobre los datos de rumbo proporcionados por un sensor de rumbo de una embarcación, que comprende:
medir una cantidad de error de medición inducido por el efecto de por lo menos una alteración sobre por lo menos uno de entre datos de rumbo x, y, y z de un sensor de rumbo;
adquirir por lo menos uno de entre datos de rumbo x, y, y z del sensor de rumbo;
determinar si está produciéndose dicha por lo menos una alteración;
corregir los datos de rumbo al producirse la alteración añadiendo un valor de corrección a los datos de rumbo que compensa la cantidad medida de error de medición inducido por la alteración;
producir…
Procedimiento y dispositivo para la localización de objetos.
(27/11/2013) Procedimiento para la localización de un objeto que se mueve en un entorno desconocido, conprevisión de k marcas de posición en posiciones indeterminadas distanciadas unasde otras p1, p2,..., pk, con , siendo k un número natural mayor o igual que 3,
medición repetida de la distancia entre objeto y marca de posición paracada una de las marcas de posición independientemente unas de otras parainstantes incontrolados, de manera que para los instantes existen los valores de distancia, y
cálculo de una curva de movimiento**Fórmula** mediante
siendo n el número de mediciones de distancia empleadas y siendo cada función k(t, ti) una función principaldefinida positivamente y…
Sistema de causar baja de forma segura un UAV.
(02/08/2013) Un sistema (1; 1A; 1B) de causar baja a distancia de un vehículo no tripulado conectado de manera comunicativa con una estación de control de un vehículo no tripulado a través de una interfaz aérea, dicho sistema de causar baja comprende una porción de estación de control situada en dicha estación de control y una porción de vehículo situada en dicho vehículo no tripulado, comprendiendo la porción de la estación de control del sistema de causar baja:
- una computadora de la estación de control que comprende un medio adaptado para generar,sobre una base cíclica unos valores de contador diferentes;
- un dispositivo de causar baja adaptado para generar, en cada ciclo, un código de estación…
Procedimiento para compensar las alteraciones de una brújula magnética en una embarcación.
(18/06/2013) Procedimiento para compensar las alteraciones de un sensor de rumbo magnético de una embarcación, quecomprende:
reducir el efecto de la interferencia del campo electromagnético del equipo eléctrico de la embarcación sobre laprecisión de una señal de rumbo procedente del sensor magnético, cambiando un uso de la señal de rumbobasándose en por lo menos un modo de función de la embarcación y una posición de un aparato de control delmovimiento de un barco mediante por lo menos uno de entre: compensar la interferencia del campo y adquirir laseñal de rumbo únicamente cuando la interferencia electromagnética es suficientemente baja para evitar unaimprecisión sustantiva de los datos de rumbo.
Control de un barco propulsado por chorro de agua.
(18/06/2013) Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
iniciar un movimiento lateral de la embarcación acoplando el dispositivo de propulsión trasero, al tiempo que seretrasa el acoplamiento del propulsor;
acoplar el propulsor tras un primer retardo de tiempo predeterminado para ayudar al movimiento lateral de laembarcación después de que una popa de la embarcación haya adquirido una cantidad de movimiento lateral apartir del dispositivo de propulsión trasero, basándose el primer retardo de tiempo predeterminado en lascaracterísticas de funcionamiento de la embarcación para minimizar la guiñada de la embarcación durante elmovimiento lateral.
Control de un barco propulsado por chorro de agua.
(18/06/2013) Procedimiento para calcular el rumbo de una embarcación, que comprende:
adquirir un rumbo 5 de la embarcación en un instante de base;
adquirir una velocidad de viraje de rumbo a partir de una velocidad angular de un sensor de viraje de laembarcación en un instante posterior;
determinar si el rumbo adquirido es considerado preciso en el instante posterior;
si el rumbo adquirido es considerado impreciso, calcular un rumbo de la embarcación basado en la velocidad deviraje de rumbo y el rumbo originalmente adquirido;
transmitir el rumbo calculado para el control del rumbo de la embarcación.
Control de un barco propulsado por chorro de agua.
(12/06/2013) Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
durante por lo menos uno de entre el inicio y el cese del movimiento lateral de la embarcación mediante elacoplamiento/desacoplamiento del propulsor, posicionar previamente un ángulo del dispositivo de propulsióntrasero para proporcionar una fuerza lateral que minimice la guiñada del barco antes de que se produzca un errorde rumbo, el ángulo posicionado previamente basado en las características de funcionamiento de laembarcación.
SISTEMA DE GUIADO PARA MOVIMIENTO AUTÓNOMO DE VEHÍCULOS EN ENTORNOS ESTRUCTURADOS.
(22/04/2013) El objetivo de la invención es un sistema de guiado de vehículos autónomos mediante cámaras y/o fotodetectores para seguir una trayectoria, que se determina por un conjunto de emisores láser dispuestos en un entorno estructurado, por ejemplo, en los distintos pasillos de un invernadero, y que determina la trayectoria a seguir.
Para el establecimiento de la trayectoria a seguir, se dispone de diversos emisores láser colocados en los pasillos del invernadero, que estarán activos en función de los pasillos que deba recorrer el vehículo para describir la trayectoria prevista.
PROCEDIMIENTO PARA LA ADQUISICIÓN Y PROCESAMIENTO DE INFORMACIÓN GEOGRÁFICA DE UN TRAYECTO.
(01/02/2013) Procedimiento para la adquisición y procesamiento de información geográfica de un trayecto.
La invención propuesta se refiere a un procedimiento para la adquisición y procesamiento simultáneo de información geográfica de un trayecto adquirido mediante misiones terrestres y aéreas de tándem que comprende un vehículo terrestre y una o más aeronaves no tripuladas cuya trayectoria está sujeta a la del vehículo terrestre que se desvía mediante desviaciones de tiempo y espaciales. El procedimiento comprende las etapas de: adquirir datos e información geográficos por medio de una pluralidad de sensores del vehículo terrestre; enviar información de trayectoria…
Sistema de teleoperación de vehículos posibilitada con háptica.
(04/04/2012) Un sistema para la teleoperación de un vehículo , que comprende:
un componente de control configurado para proporcionar control de posición y de orientación con retroacción háptica de fuerzas del vehículo sobre la base de una medición de la posición y de las fuerzas de inercia del vehículo y que está configurado para funcionar en un modo de retroacción en bucle cerrado, en donde las diferencias en al menos una de entre la posición y la velocidad entre el vehículo y un objeto Proxy simulado proporcionan una o más solicitudes de control al vehículo, y en donde las diferencias en al menos una de entre la posición y la velocidad del objeto proxy simulado y un dispositivo de entrada/salida (I/O) háptico…
Sistema y método de teleoperación de vehículos posibilitada con háptica.
(28/03/2012) Un sistema para la teleoperación de un vehículo , que comprende:
un componente de control configurado para proporcionar control de posición y de orientación con retroacción háptica de fuerzas del vehículo sobre la base de una medición de la posición del vehículo y que está configurado para funcionar en un modo de retroacción en bucle cerrado, que se caracteriza porque las diferencias en al menos una de entre la posición y la velocidad entre el vehículo y un objeto proxy simulado proporcionan una o más solicitudes de control al vehículo, y porque las diferencias en al menos una de entre la posición y la velocidad del objeto proxy simulado y un dispositivo de E / S háptico se utilizan para el control de retroacción, y porque el sistema está configurado para controlar simultáneamente una pluralidad de vehículos…
PROCEDIMIENTO DE AYUDA AL DESPEGUE DE UNA AERONAVE.
(01/04/2007) Procedimiento de ayuda al despegue de una aeronave que comporta unos alerones de borde de fuga y unas aletas de borde de ataque , así como un empenaje horizontal regulable al cual están articulados unos timones de profundidad procedimiento según el cual: - se predetermina un valor VR de velocidad de la aeronave, denominada velocidad de rodadura, en la cual debe comenzar la rodadura de despegue, debiendo dicho valor VR encontrarse dentro de una gama de valores de velocidad impuesta por las disposiciones reglamentarias; y - se aplica a dicha aeronave una orden de cabeceo de ayuda al despegue que desvía dicho empenaje horizontal regulable con un ángulo cuyo valor está predeterminado, caracterizado porque: - en dicha gama de valores de velocidad, se elige arbitrariamente una velocidad de referencia VRref y se determina,…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}