CIP-2021 : G05D 1/00 : Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres,
acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
CIP-2021 › G › G05 › G05D › G05D 1/00[m] › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G05D 1/03 · · que utilizan sistemas de transmisión por proximidad de campo, p. ej. del tipo de bucle inductivo.
G05D 1/04 · Control de la altitud o de la profundidad.
G05D 1/06 · · Régimen de modificación de la altitud o de la profundidad.
G05D 1/08 · Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
G05D 1/10 · Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
G05D 1/12 · Control para la búsqueda de un objetivo.
CIP2021: Invenciones publicadas en esta sección.
Navegación mediante puntos de referencia.
(10/01/2018) Un procedimiento de control de un Vehículo Aéreo No Tripulado desde una estación de control por medio de un enlace de comando inalámbrico, que implica:
control de vuelo en un modo autónomo en el que el vehículo vuela de acuerdo con una ruta primaria (R1, R1') definida por un primer conjunto de puntos de referencia predefinidos (WP1-WP8, IP),
control de vuelo en un modo manual en el que el vehículo vuela de acuerdo con una ruta primaria (R1') definida por comandos de control recibidos a través del enlace de comando inalámbrico, y
supervisión funcional de un conjunto de parámetros de control de vuelo (P1-Pn) tanto en el modo autónomo como el modo manual, en…
Sistema de control redundante multifrecuencia para vehículos no tripulados.
(18/12/2017). Solicitante/s: UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA. Inventor/es: PEREZ GARCIA,MANUEL, GALVÁN GONZÁLES,Blas José, AGUASCA COLOMO,Ricardo, HERNÁNDEZ GOYA,Maria Candelaria.
Esta invención tiene como objeto mejorar la fiabilidad de los vehículos no tripulados sea cual sea su uso. Actualmente no existe ningún dispositivo que permita utilizar varios receptores en paralelo, y la posibilidad de combinar con ellos un sistema externo de control de trayectoria automático, de forma que la pérdida de señal en uno de ellos no implique pérdida de control. Esta invención soluciona el problema de la inexistencia de sistemas de recepción redundantes, con control asistido.
PDF original: ES-2646931_B2.pdf
PDF original: ES-2646931_A1.pdf
Sistema de gestión de vuelo en espacio aéreo segregado para aeronave.
(23/08/2017) Sistema de gestión de vuelo para aeronave, destinada dicha aeronave a efectuar misiones en un espacio aéreo no segregado y/o en un espacio aéreo segregado, comprendiendo dicho sistema al menos:
- un ordenador de misiones;
- un ordenador principal de gestión de vuelo;
- un piloto automático;
- interfaces hombre-máquina;
- dispositivos de visualización;
- un ordenador secundario de gestión de vuelo que comprende medios de adquisición de instrucciones tácticas a partir del ordenador de misión y medios de cálculo de trayectoria y de guía lateral de la aeronave, siendo dichas instrucciones tácticas diferentes de los procedimientos de navegación en espacio controlado; caracterizado porque el sistema gestión…
Sistema para control geométrico de precisión de piezas tridimensionales de gran tamaño y método para dicho sistema.
(21/08/2017). Solicitante/s: INGENIO 3000 SL. Inventor/es: ALONSO BORRAGAN,IGNACIO JOSE.
Sistema para control geométrico de precisión de piezas tridimensionales de gran tamaño; del tipo basado en fotogrametría, que comprende, unas cámaras para toma de imágenes desde, al menos, dos puntos de vista, unos puntos de control dispuestos en dicha pieza para ser captados por las cámaras y un procesador de las imágenes captadas por las cámaras para medir el desvío de las posiciones reales con respecto a las posiciones previstas , y que comprende unos puntos de control tridimensionales y una disposición (9, 9a) de cámaras en número y posición suficiente para que cada punto de control sea tomado simultáneamente por, al menos, tres cámaras . La invención también comprende un método para el sistema.
PDF original: ES-2630387_A1.pdf
PDF original: ES-2630387_B1.pdf
Método y sistema para el control a distancia de un robot móvil.
(21/06/2017) Un método para permitir a un usuario controlar a distancia un robot, cuyo método comprende: proporcionar información de imagen, capturada por una cámara de vídeo, representativa de una zona situada alrededor del robot;
proporcionar, utilizando la información de imagen, una imagen de vídeo perceptible por un usuario representativa de la zona situada alrededor del robot ;
determinar una localización de la cámara de vídeo relativa a una posición actual del robot, comprendiendo la determinación de tramas de referencia en la zona situada alrededor del robot ;
permitir al usuario designar, en la imagen de vídeo perceptible por un usuario, un objetivo hacia el cual debe desplazarse el robot, cuya función comprende:
determinar una localización de clic dentro de la imagen de vídeo perceptible por un usuario seleccionada por el…
Sistema de actuadores eléctricos telemandados para el control remoto de un tractor agrícola y metodología para su instalación.
(12/06/2017). Solicitante/s: MANTEIGA VARELA, Jose Francisco. Inventor/es: MANTEIGA VARELA,Jose Francisco.
Sistema de actuadores eléctricos telemandados, para el control remoto de un tractor agrícola y metodología para su instalación, convirtiendo el tractor en telemandado en todas o parte de sus funciones. La invención consiste en una pluralidad de actuadores eléctricos instalados sobre los mandos (palancas, pedales, volante, etc..) o sobre el recorrido del mecanismo de accionamiento de estos en un tractor convencional y que son operados a distancia por medio de un dispositivo de radiofrecuencia emisor/receptor, cuyo receptor, cableado con los actuadores, va instalado sobre el tractor y el emisor lo maneja el operario. El sistema se adapta a cualquier tractor agrícola y se puede desinstalar fácilmente. Diseñado para poder implementar módulos programables provistos de sensores para realizar ciertas tareas de forma autónoma. Opcionalmente incorpora un sistema de pilotos luminosos colocados estratégicamente que informan visualmente de la situación de los mandos del tractor.
PDF original: ES-2616245_B1.pdf
PDF original: ES-2616245_A1.pdf
Dispositivo programado de control para la señalización lumínica del movimiento autónomo de un vehículo automóvil, luces de señalización del movimiento autónomo de un vehículo automóvil y procedimiento para la señalización lumínica del movimiento autónomo de un vehículo.
(09/06/2017). Solicitante/s: GUADAS SANZ, Alberto Javier. Inventor/es: GUADAS SANZ,Alberto Javier.
Dispositivo programado de control para la señalización lumínica del movimiento autónomo de un vehículo, luces de señalización del movimiento autónomo de un vehículo de aplicación con el dispositivo programado descrito en esta patente, y procedimiento de señalización lumínica del movimiento autónomo de un vehículo, son, en conjunto, la forma de identificar y señalizar claramente que un vehículo circula de manera autónoma, cambia de conducción manual a conducción autónoma o viceversa, para que los demás conductores, peatones y a las fuerzas de seguridad y tráfico, sean conscientes de la misma.
PDF original: ES-2616131_A1.pdf
PDF original: ES-2616131_B1.pdf
Procedimiento para supervisar una conducción automática.
(24/05/2017) Procedimiento para supervisar una conducción automática, que comprende:
- preparar un vehículo , sien do controlable el vehículo por medio de un sistema de asistencia en la conducción a través de procesos de control automáticos en un modo de conducción automática sin un conductor, de manera que el vehículo es controlable por medio del sistema de asistencia en la conducción en un modo de conducción de emergencia automático, en el que se termina el modo de conducción automática y se detiene el vehículo , y en el que el vehículo es controlable en un modo de conducción manual a través de procesos de control manual del conductor, en el que para un cambio entre el modo de conducción automática…
Dispositivo de autocontrol para aeronaves con control remoto (RPA).
(05/05/2017). Solicitante/s: UNIVERSIDAD DE EXTREMADURA. Inventor/es: PRECIADO RODRÍGUEZ,Juan Carlos, HERNÁNDEZ NÚÑEZ,Juan María, SÁNCHEZ FIGUEROA,Fernando, MOGUEL MÁRQUEZ,José Enrique, CONEJERO MANZANO,José María, RODRÍGUEZ ECHEVARRÍA,Roberto.
Dispositivo de autocontrol para aeronaves con control remoto (RPA), de las que comprenden un chasis con al menos un rotor y una hélice, un controlador electrónico de la velocidad, y, un dispositivo de piloto automático para el control de dicho controlador electrónico de la velocidad que comprende un ordenador montado en el chasis para gestionar el vuelo de la aeronave, y conectado con el dispositivo de piloto automático y, al menos un sensor y/o un actuador conectados al ordenador mediante un concentrador de conexiones , que presenta una pluralidad de conectores adicionales para la conexión de dichos sensores y/o actuadores y está conectado con el ordenador que está programado para procesar los datos de los sensores y gobernar el dispositivo de piloto automático para controlar el vuelo de la aeronave en función de los datos obtenidos de dichos sensores.
PDF original: ES-2611210_A1.pdf
PDF original: ES-2611210_B1.pdf
Cálculo y visualización de la velocidad de aviso para control con asimetría de empuje.
(05/04/2017). Solicitante/s: THE BOEING COMPANY. Inventor/es: HARRIGAN,Jeffery,S, EGGOLD,DAVID P, MALLOUK,BECHARA J, CHEN,SHERWIN S, WIEDEMANN,JOHN, BRESLEY,WILLIAM M, GARDNER,KYLE, FLANNIGAN,SEAN J.
Un método para el control de la actitud de cabeceo de una aeronave multimotor que experimente asimetría de empuje, que comprende las siguientes etapas:
calcular en tiempo real una velocidad mínima segura (Vaviso) de dicha aeronave multimotor que experimenta asimetría de empuje que comprende el cálculo de un coeficiente del momento de guiñada con asimetría de empuje en función de al menos los siguientes parámetros: presión dinámica, tasa de guiñada y peso del avión; y
emitir una orden de control a un actuador del timón de profundidad para ajustar la posición angular de un timón de profundidad de dicha aeronave , siendo seleccionado dicho ajuste de la posición angular de modo que la velocidad aerodinámica actual de dicha aeronave permanezca por encima de dicha velocidad mínima segura calculada (Vaviso).
PDF original: ES-2632175_T3.pdf
CONTROL SEGURO DE VEHÍCULOS NO TRIPULADOS.
(16/03/2017). Solicitante/s: TECTECO SECURITY SYSTEMS, S.L. Inventor/es: ENRIQUE SALPICO,José Antonio, TRAPERO ESTEBAN,Diego Alonso, MORENO ZAPATA,Adrian.
La presente invención propone un método, sistema y dispositivospara establecer mecanismos seguros de control de navegación aérea de Vehículos no Tripulados (por ejemplo, vehículos aéreos no tripulados, UAVs). Se aumenta la seguridad en la navegación aérea de los UAVs, mediante mecanismos de autenticación autorización y monitorización que solucionan las vulnerabilidades técnicas actuales, especialmente en las comunicaciones de control del UAV y en la información generada por el UAV, creando vínculos entre el piloto del UAV (piloto), el UAV y organismos reguladores o decontrol de la seguridad aérea(ASAs).
PROCEDIMIENTO PARA LA MEDICIÓN DE HELIOSTATOS.
(07/03/2017) Procedimiento para la medición de heliostatos.
La presente invención se refiere a un procedimiento para la medición de heliostatos de un campo de heliostatos de una central solar de torre central que presenta varios heliostatos . Los heliostatos presentan respectivamente al menos un reflector que presenta una superficie de espejo con las siguientes etapas:
- posicionamiento de una aeronave controlable por encima del campo de heliostatos en una posición inicial (P) predeterminada,
- movimiento de la aeronave según un patrón de vuelo predeterminado y toma simultánea de imágenes de un heliostato o de varios heliostatos mediante una cámara a un intervalo de tiempo predeterminado,…
(11/01/2017). Solicitante/s: Nokia Technologies OY. Inventor/es: CRICRI,FRANCESCO, SAARINEN,JUKKA.
Un método que comprende:
colocar uno o más drones en un espacio del escenario monitorizado para definir, al menos parcialmente, la forma y la posición de un límite virtual implementado por ordenador en un espacio de monitorización correspondiente;
causar la implementación del límite virtual implementado por ordenador en el espacio de monitorización correspondiente al espacio del escenario monitorizado, y
procesar los datos recibidos desde los sensores del espacio del escenario monitorizado para generar un episodio de respuesta, que responde a un cambio en al menos una parte del espacio del escenario monitorizado con respecto al límite virtual implementado por ordenador en el espacio de monitorización correspondiente.
PDF original: ES-2667096_T3.pdf
DISPOSITIVO DE SEGURIDAD PARA VEHÍCULOS MEDIANTE CÁMARA.
(30/12/2016) 1. Dispositivo de seguridad para vehículos mediante cámara que, aplicable para instalarse en un vehículo automóvil y comprendiendo, al menos, una cámara de captación de imagen de vídeo vinculada a un equipo reproductor de imagen con una pantalla y botonadura de control incorporados en el salpicadero del vehículo de manera accesible al conductor, está caracterizado porque dicha, al menos, una, cámara está incorporada de manera integrada en el interior de la carcasa de alguno de los faros de dicho vehículo .
2. Dispositivo de seguridad para vehículos mediante cámara, según la reivindicación 1, caracterizado porque comprende una cámara incorporada dentro de la carcasa de cada uno de los dos faros frontales y otra en cada uno de…
Procedimiento y sistema de dirección de un vehículo aéreo no tripulado.
(26/10/2016). Ver ilustración. Solicitante/s: UMS Skeldar Sweden AB. Inventor/es: MOLANDER,SÖREN, SÖDERMAN,JOHAN, WALDO,MATTIAS.
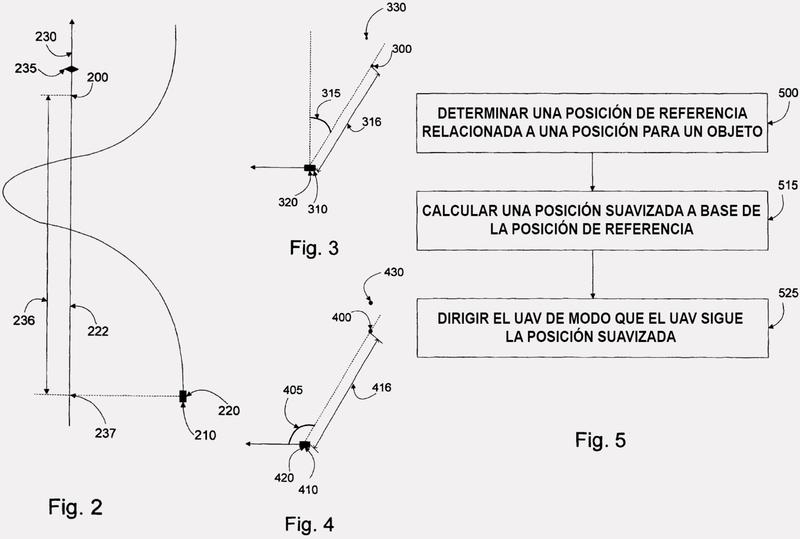
Un procedimiento de dirección de un UAV, Vehículo Aéreo No Tripulado, para habilitar un comando de alto nivel de dicho UAV, el procedimiento comprende las etapas de:
- determinar una posición de referencia relacionada con una posición para un objeto que dicho UAV debería seguir; estando el procedimiento caracterizado por:
- calcular una posición suavizada en base a en dicha posición de referencia, en el que el cálculo implica regular dicha posición suavizada a dicha posición de referencia, de modo que dicha posición suavizada tiene una frecuencia de movimiento más baja que dicha posición de referencia; y
- dirigir dicho UAV de modo que dicho UAV sigue la posición suavizada.
PDF original: ES-2612163_T3.pdf
Método para la operación de un buque oceánico no tripulado.
(26/10/2016) Método para conducir un buque oceánico no tripulado , donde el buque comprende un casco , una vela de ala autosujeta para propulsión, una quilla para estabilidad de la dirección, y un timón ,
caracterizado por los pasos:
- ajustar el timón y la vela para que el recipiente mantenga una dirección estable con respecto al viento en una desviación del timón dada,
a) - para verificar la posición del buque con la ayuda de un sistema de conducción electrónico a bordo, y si está registrado que el buque no se acerca más a su destino,
b) - ajustar el timón para establecer un nuevo, curso arbitrario, donde el curso se selecciona entre un numero de cambios de curso…
Puesto de control de drones.
(05/10/2016) Puesto de control de una pluralidad de drones, que comprende:
- un dispositivo de visualización configurado para la visualización de elementos gráficos que incluye elementos gráficos activos (14A) configurados para la interacción de un operador con el puesto de control y/o uno o más drones,
- una interfaz de control para la entrada al puesto de control por las órdenes del operador, y
- un oculómetro configurado para detectar la dirección de la mirada del operador ,
caracterizado porque el puesto de control está configurado para activar selectivamente uno de una pluralidad de primeros modos operativos del puesto de control asociados respectivamente con uno de los elementos gráficos activos (14A) en respuesta…
DISPOSITIVO DE APLICACIÓN EXTERNA EN VEHÍCULOS MÓVILES PARA CONSEGUIR ENERGÍA ELÉCTRICA.
(04/10/2016) 1. Dispositivo de aplicación externa en vehículos móviles para conseguir energía eléctrica, en base a una turbina dotada de medios de generación de energía eléctrica, y cuya turbina forma parte de una base fijable a la parte externa del fuselaje de una nave terrestre, marítima o aérea, caracterizado porque incluye un conjunto de sensores y señalizadores para la obtención de información del entorno del correspondiente vehículo, y de generación de información de posición, contando igualmente con electrónica de control y de almacenamiento de datos; habiéndose previsto además, que el conjunto que forma la base con la turbina y demás elementos, determinen un pequeño y ligero equipo.
2.…
DISPOSITIVO ¿ METODO PARA ASISTIR LA NAVEGACION ROBOTICA DE UN VEHICULO EN UN AMBIENTE RUIDOSO.
(22/09/2016). Solicitante/s: UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA. Inventor/es: AUAT CHEEIN,Fernando Alfredo, FREDES ZARRICUETA,Ernesto Alejandro, GONZALEZ VIDAL,Eduardo Agustin.
Un dispositivo y método para asistir la navegación robótica de un vehículo en un ambiente ruidoso, donde el dispositivo comprende un arreglo de micrófonos dispuesto en el vehículo para capturar el sonido interno como externo de dicho vehículo; un procesador de señales anal0gicas a digitales que filtra y acondiciona las señales obtenidas desde el arreglo de micrófonos, las cuales son restringidas a un rango audible del ser humano, entre 300 y 20.000 Hz, desechando las frecuencias inferiores a 300 Hz y superiores a 20.000 Hz, mediante filtros pasa banda programables; además, el procesador las procesa y clasifica, detectando y los ambientes según su sonido, mediante redes neuronales del tipo feed-forward; y genera restricciones a los limites máximos y mínimos de velocidad del vehículo tanto lineal como angular, para el control del vehículo.
Vehículo aéreo no tripulado que recupera energía de corrientes ascendentes de aire.
(17/08/2016) Un método para operar un vehículo aéreo no tripulado que tiene una capacidad de planeo dentro de una región geográfica, comprendiendo el vehículo aéreo no tripulado un generador dispuesto para ser accionado por un rotor , comprendiendo el método las etapas de:
indicar la ubicación de al menos una corriente ascendente de aire dentro del área geográfica; y
maniobrar el vehículo aéreo no tripulado dentro de la corriente ascendente de aire identificada;
el método caracterizado por:
definir un umbral máximo de altitud para una región geográfica, por encima del que no se permite el vuelo del vehículo aéreo no tripulado ; y
mantener una altura igual o inferior al umbral máximo de altitud…
DISPOSITIVO DE DETECCIÓN E INTERCEPCIÓN DE AERONAVES NO TRIPULADAS (DRONES).
(18/07/2016) 1. Dispositivo de detección e intercepción de aeronaves no tripuladas (drones), caracterizado por estar compuesto de:
- Uno o varios circuitos receptores de radio.
- Una o varias cámaras.
- Un ordenador con un software de control.
- Un circuito de carga de baterías.
- Un circuito de comunicaciones y sincronización mediante WiFi, y comunicaciones móviles (3G, 4G...).
- Una batería o sistema de alimentación de corriente eléctrica.
2. Dispositivo según la reivindicación 1 caracterizado porque comprende:
- Un drone, con sus motores y circuitos de control y estabilización de vuelo.
3. Dispositivo según la reivindicación…
Sistema y método para probar tecnologías de prevención de accidentes.
(29/06/2016) Un Elemento de Movimiento Dinámico para su utilización en pruebas de tecnologías de prevención de accidentes en un vehículo objeto, en que el Elemento de Movimiento Dinámico comprende:
un cuerpo que comprende una superficie superior en que la superficie superior está adaptada para soportar un cuerpo blando que tiene el tamaño y la forma de un vehículo o parte de un vehículo, en que el cuerpo tiene al menos un lado cónico de manera que permita que el vehículo objeto se desplace hasta y sobre la superficie superior con un daño mínimo o sin ningún daño al vehículo objeto ni al Elemento de Movimiento Dinámico, en que el cuerpo se apoya sobre una pluralidad de ruedas, que incluyen al menos una rueda accionada en rotación junto con una…
Dispositivo de gestión de anuncios de lugares de interés.
(16/06/2016) 1. Dispositivo de gestión de anuncios de lugares de interés caracterizado esencialmente porque comporta:
- Unos medios de posicionamiento capaces de determinar las coordenadas de posición del vehículo.
- Una base de datos con una biblioteca de referencias con, como mínimo, dos campos de información. Un campo con la coordenada de posición del lugar de interés y un campo con el nombre asociado al lugar de interés .
- Una pantalla de información .
- Una unidad de proceso , operativamente conectada a los medios de posicionamiento y a la pantalla de información , que busca identidades entre las coordenadas de posición del vehículo medidas y las coordenadas de posición almacenadas en…
Sistema y método para el control a distancia seguro de vehículos.
(01/06/2016) Método para el control a distancia de vehículos , en el cual un video grabado por al menos una cámara de vídeo se transmite en tiempo real desde un vehículo controlado a distancia , por al menos un enlace móvil de radio sobre una red móvil de radio , a un centro de control , visualizándose el vídeo recibido en el centro de control , recibiendo el centro de control los comandos de control de un operador, y transmitiendo estos comandos de control por medio del mismo o al menos una conexión adicional móvil de radio sobre la red móvil inalámbrica , al vehículo controlado a distancia , siendo ejecutados los comandos de control por…
Método de control a distancia de un aparato limpiador de una superficie sumergida.
(01/06/2016) Un método de mando a distancia de un aparato automóvil limpiador de una superficie sumergida por medio de un dispositivo de control a distancia, dicho aparato que comprende un cuerpo y un dispositivo de accionamiento que comprende órganos de guiado y de accionamiento adaptados para accionar y guiar el cuerpo sobre la superficie sumergida, dicho dispositivo de control que comprende un terminal de control que comprende al menos una caja que comprende un detector de orientación y una unidad de tratamiento de señales proporcionadas por el detector de orientación, dicho método que está caracterizado porque comprende las etapas de:
-…
Inceptor y método para operar un inceptor.
(11/05/2016) Un aparato inceptor para controlar la aeronave, que comprende:
una palanca de control para el accionamiento por un usuario;
un generador de retroalimentación de usuario acoplado a la palanca de control y configurado para recibir señales desde un indicador de estado del vehículo alejado del aparato inceptor;
caracterizado por comprender además un primer sensor de estado del vehículo dedicado al funcionamiento del aparato inceptor;
en donde en un primer modo de funcionamiento, el generador de retroalimentación de usuario se acciona para generar retroalimentación táctil al usuario a través de la palanca de control en dependencia de las señales recibidas desde el indicador de estado del vehículo ;
y, en un segundo modo de funcionamiento, en el caso de que no se reciba señal desde el indicador…
Sistema de control de asistencia para la operación de conducción de vehículos.
(06/04/2016) Un sistema de control de guía para la operación de conducción de vehículos que comprende:
un operador de regulación operado por un conductor a bordo de un vehículo para controlar la operación de aceleración del vehículo por el conductor;
un accionador conectado mecánicamente al operador de regulación ; y
una unidad de control electrónica como un controlador adaptado para calcular un punto de inicio (P4) para la operación de aceleración/desaceleración del vehículo y para activar el accionador en un punto (P1) antes del punto de inicio (P4) a lo largo de una dirección de desplazamiento (C) del vehículo de tal manera que el accionador aplique…
Procedimiento y sistema de regulación de potencia en caso de fallo de al menos un motor de aeronave.
(06/04/2016) Procedimiento de regulación de potencia en caso de fallo de al menos un motor (M1, M2) de una aeronave que incluye una unidad de proceso digital de datos central que suministra una función de emergencia apta para activar una señal de emergencia (S), caracterizado por que el procedimiento consiste, con el concurso de un grupo de potencia principal de clase motor llamado GPP que, administrado por una función de control y de supervisión, funciona permanentemente en vuelo asumiendo una parte (PGA) de la potencia no propulsiva total nominal (PTA) de la aeronave, en incrementar sus límites de funcionamiento, ante la recepción de la señal de emergencia (S), para poder proporcionar, de manera prácticamente instantánea, potencias no propulsivas (PSU, PMU, PIU) aumentadas según al menos tres regímenes de emergencia (RS, RM, RI) en el momento de dicho fallo…
Robot limpiador, sistema de control remoto y método del mismo.
(24/02/2016) Un sistema de control remoto de un robot limpiador, comprendiendo el sistema:
un robot limpiador configurado para crear un mapa de limpieza con respecto a una región de limpieza que debe ser limpiada realizando una operación de limpieza para la región de limpieza; y
un dispositivo terminal configurado para controlar el robot limpiador generando un comando de control con respecto a el robot limpiador ,
caracterizado porque:
el robot limpiador está configurado para crear un mapa de grado contaminante a partir del mapa de limpieza detectando un grado contaminante de la región de limpieza después de crear el mapa de limpieza; y
el dispositivo terminal está configurado para controlar el robot limpiador…
Sistema y método para probar tecnologías de prevención de accidentes.
(24/02/2016) Un Elemento de Movimiento Dinámico para su utilización en pruebas de tecnologías de prevención de accidentes en un vehículo sujeto, en que el Elemento de Movimiento Dinámico comprende:
una carrocería que comprende una superficie superior en la que la superficie superior está adaptada para soportar un cuerpo blando que tiene el tamaño y la forma de un vehículo o una parte de un vehículo, en que la carrocería tiene al menos un lado cónico de manera que permita al vehículo sujeto accionarse hasta y sobre la superficie superior con un daño mínimo o con ningún daño al vehículo sujeto ni al Elemento de Movimiento Dinámico, en que la carrocería está soportada por una pluralidad de ruedas; y
un sistema de accionamiento por correa para proporcionar potencia a por lo menos una de las ruedas, en que el sistema de accionamiento…
SISTEMA Y MÉTODO PARA LA PLANIFICACIÓN DE VUELO AUTÓNOMO.
(11/02/2016). Solicitante/s: UNIVERSIDAD DE ALICANTE. Inventor/es: AZNAR GREGORI,Fidel, RIZO ALDEGUER,Ramón, PUJOL LÓPEZ,Mar.
La presente invención se refiere a un sistema y a un método cuya finalidad es proveer de un mecanismo para permitir la planificación aalto nivel de placas de control de vuelo que implementen el protocolo MAVLINK, logrando ejecutar planes de vuelo dinámicos y con total autonomía adaptándose a las condiciones de la aeronave y del entorno. El sistema toma como base cualquier controlador de vuelo que implemente el protocolo MAVLINK y ejecuta un método de planificación de vuelo autónomo, capaz de proporcionar una capa de funcionalidad inexistente en los controladores de vuelo actuales. El método que se propone permite ejecutar un plan de vuelo de alto nivel, que desarrolle un comportamiento dependiendo no solo del estado de la aeronave, sino del entorno circundante.
Sistema y método para la planificación de vuelo autónomo.
(08/02/2016). Solicitante/s: UNIVERSIDAD DE ALICANTE. Inventor/es: AZNAR GREGORI,Fidel, RIZO ALDEGUER,Ramón, PUJOL LÓPEZ,Mar.
Sistema y método para la planificación de vuelo autónomo.
La presente invención se refiere a un método para la planificación de vuelo autónomo que comprende las siguientes etapas: verificar estado del dispositivo, conectar con el controlador de vuelo, obtener flujo de datos de vuelo del controlador, adquirir flujo de señal y comunicaciones, verificar estado de seguridad del vuelo autónomo, determinar de manera autónoma el siguiente movimiento de la aeronave leyendo los datos del controlador y los sensores y actuando con base al plan de vuelo seleccionado, enviar comandos de vuelo al controlador y registrar el vuelo. La presente invención también se refiere a un sistema que incorpora los medios necesarios para ejecutar el método de planificación de vuelo autónomo.
PDF original: ES-2558732_B2.pdf
PDF original: ES-2558732_A1.pdf
{kind=link}